Firmware image and ReachView version: V2.20.8
[System report]
Simple system report
app version: 2.20.8-r0
'wifi_status, interface: wlan0':
- wifi_mode: wpa_supplicant
- ip: 10.15.16.26
is_connected: true
mac_address: fc:db:b3:92:d4:30
ssid: Gokturk_wifi
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: serial://ttyMFD2:57600:8:n:1:off#rtcm3
type: serial
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1010':
enabled: true
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
camera:
duty cycle: 20
enable: false
period: 2
polarity: true
correction input:
input2:
enabled: true
format: rtcm3
path: ttyMFD2:38400:8:n:1:off
send position to base: 'off'
type: serial
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: UBX
started: true
version: null
solution:
format: LLH
started: true
version: null
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:38400:8:n:1:off
type: serial
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh_ext
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: false
glonass: true
gps: true
qzss: false
sbas: true
snr mask: '15'
update rate: '5'
Hello ,
I’ve been using your rtk kit for a while. I didn’t have any problems during the first test flights.
Arduplane setting:
Reach:
Reach rs:
Connection screen :
I use for this Rfd868x and set parameters Raw Data and clear ecc field.
Also try for connect over wifi (between Reach RS and Reach )
Connection running stable
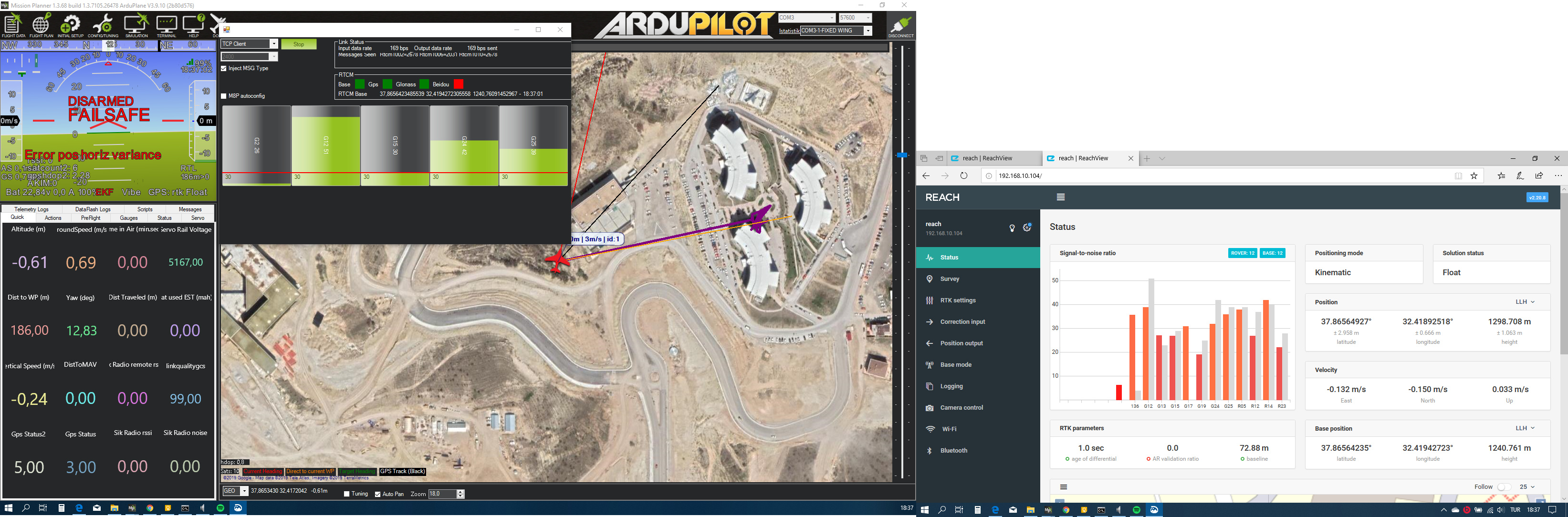
Reach screen after connection.
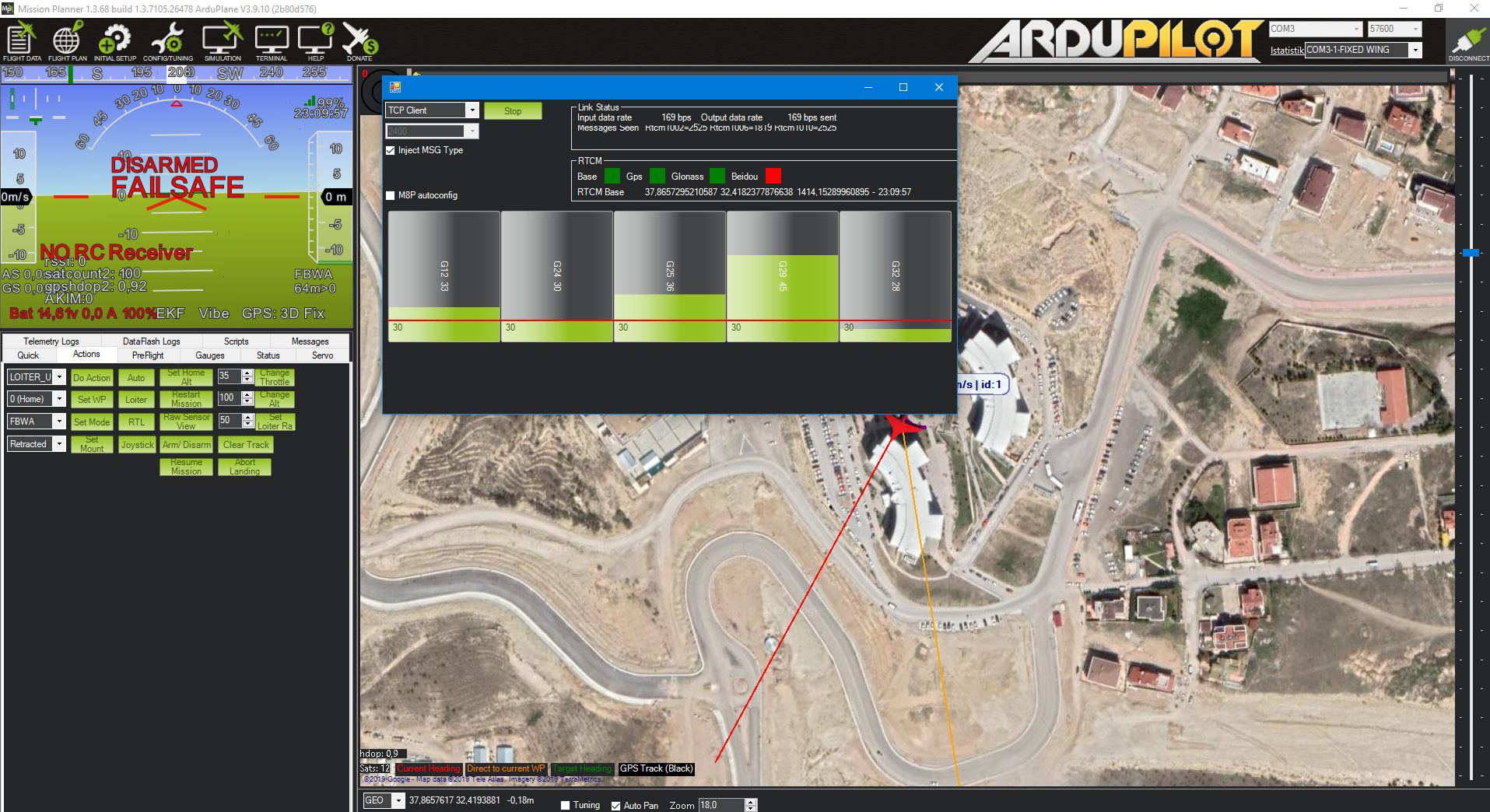
Although GPS 2 is detected and position is sent, rtk correction is not transmitted on Reach
Thanks for your help
Hi Kadir,
It seems I’ve already answered to your email. However, I duplicate it here so other users can join the discussion and advise anything useful.
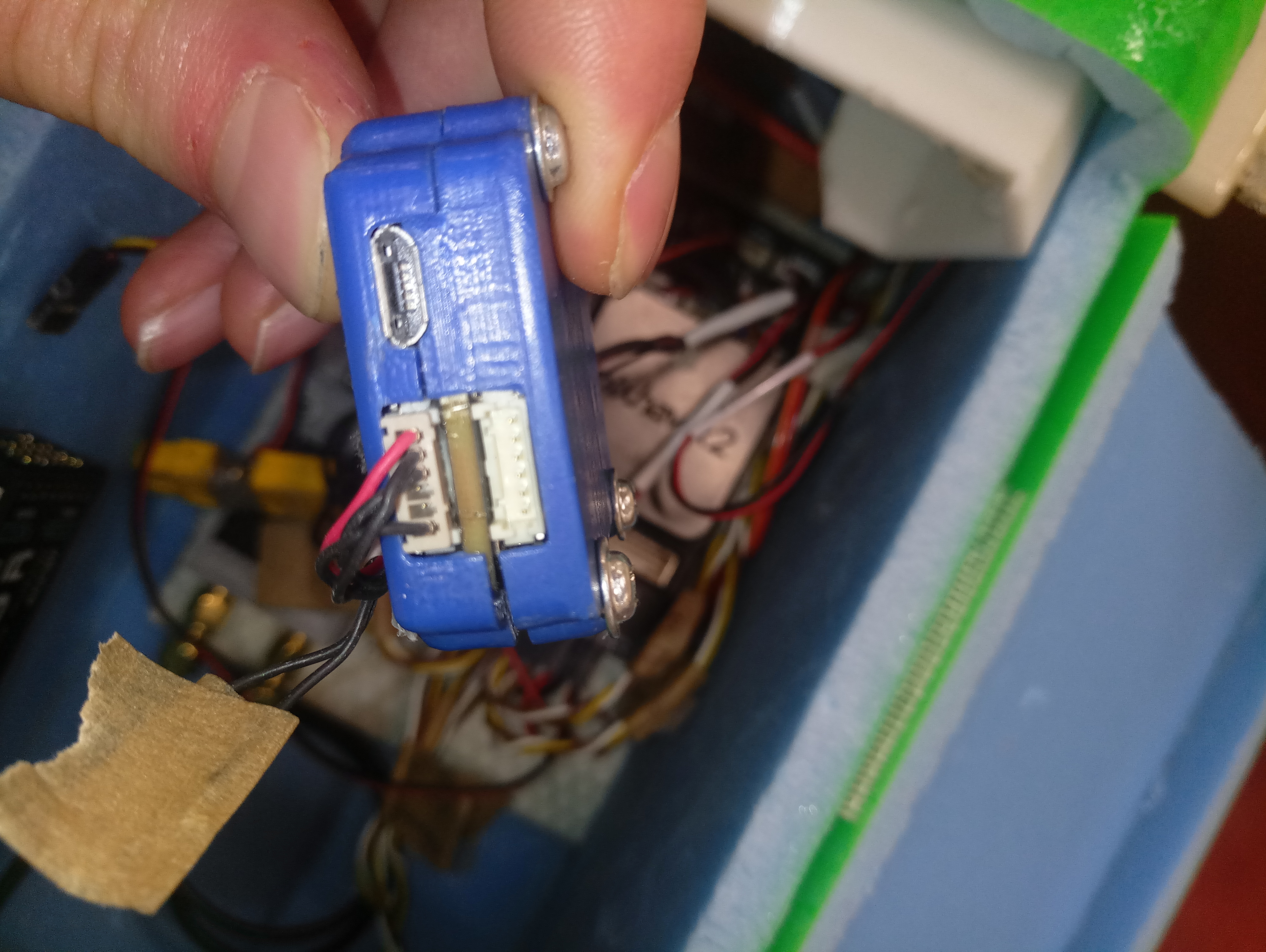
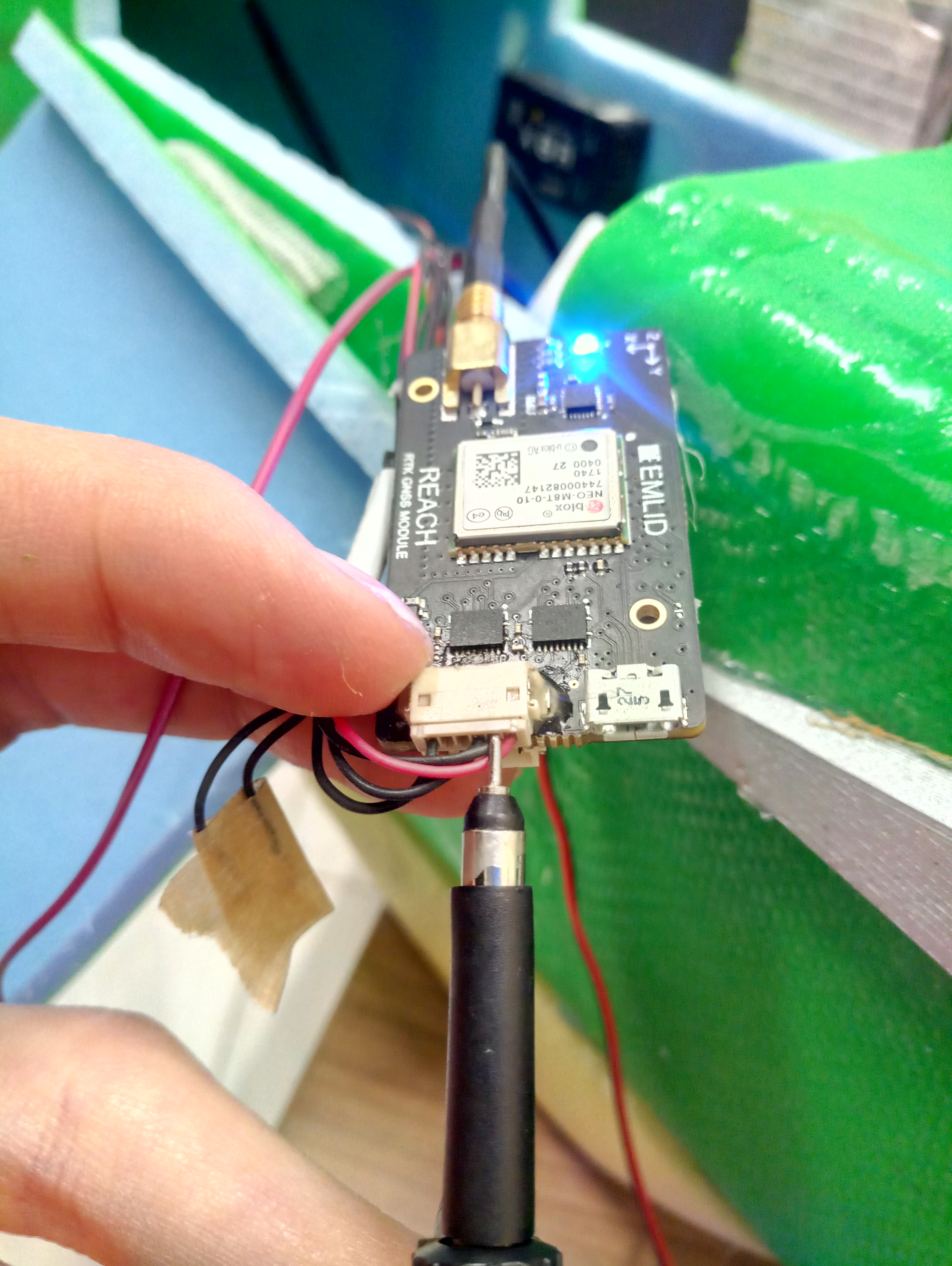
First, may I ask you to share your hardware setup photos so I can check if Reach is connected correctly to the flight controller?
Also, I’d like to ask you to update images in your first post as they can’t be loaded.
Thanks.
I checked the Tx and Rx pins and connected them with the cable that came with the Pixhawk.
Now I use Telem2 Port on Pixhawk
Hi Kadir,
I checked all the screenshots you sent me in the email once again and it looks like everything is configured properly.
I assume there is might be an issue with wires. Is there any chance you have got another cable to test with it?
The cable in the photos I took was new. I got the same result as the previous cable
Hi Kadir,
We’ll try to replicate your setup to check where the issue might appear.
gleb.gira
December 4, 2019, 1:07pm
8
Hi Kadir,
I’ve tried to reproduce your setup. May I ask you to change the following configurations:
Use GPS2 port instead of TELEM2 on Pixhawk.
Change GPS_TYPE2 parameter in the MissionPlanner from “1” - AUTO to “13” - ERB .
Let me know if it helps.
Hi Gleb ,
I tryed your suggestion .Changed port and type , status did not change.
You may want to try an power reach from a separate bec I have noticed they are quite sensitive to power fluctuations many of those ports on the pixhawk cannot support large loads. telem 1 is its own 1amp circuit the rest share 1amp.
gleb.gira
December 9, 2019, 4:46pm
13
Hi Kadir,
May I ask you to send System Reports for both Base and Rover?
Also, could you you please take a screenshot of incoming base corrections in the MissionPlanner?
Hi Gleb,
I run the system, made all the connections, and I got the reports.
ReachRS log;
Simple system report
app version: 2.20.8-r0
'wifi_status, interface: wlan0':
- wifi_mode: wpa_supplicant
- ip: 192.168.10.100
is_connected: true
mac_address: fc:db:b3:95:e4:71
ssid: Gokturk_wifi
base mode:
base coordinates:
accumulation: '1'
antenna offset:
east: '0'
north: '0'
up: '1.48'
coordinates:
- '37.86565182'
- '32.41805361'
- '1200.945'
format: llh
mode: float-and-hold
output:
enabled: true
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '1'
'1008':
enabled: true
frequency: '5'
'1010':
enabled: true
frequency: '1'
'1019':
enabled: true
frequency: '5'
'1020':
enabled: true
frequency: '5'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
gps:
enabled: false
frequency: '1'
qzss:
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
correction input:
input2:
enabled: true
format: rtcm3
path: K104200201:***@212.156.70.42:2101/VRSRTCM31
send position to base: single
type: ntripcli
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: UBX
started: true
version: null
solution:
format: LLH
started: true
version: null
lora:
air rate: 2.6000000000000001
frequency: 868000
output power: 20
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:57600:8:n:1:off
type: serial
output2:
enabled: false
format: llh
path: ttyGS0:115200:8:n:1:off
type: serial
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: false
glonass: true
gps: true
qzs: true
qzss: false
sbas: false
snr mask: '10'
update rate: '1'
Reach log;
Simple system report
app version: 2.20.8-r0
'wifi_status, interface: wlan0':
- wifi_mode: wpa_supplicant
- ip: 192.168.10.108
is_connected: true
mac_address: fc:db:b3:92:d4:30
ssid: Gokturk_wifi
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: serial://ttyMFD2:57600:8:n:1:off#rtcm3
type: serial
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1010':
enabled: true
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
camera:
duty cycle: 20
enable: false
period: 2
polarity: true
correction input:
input2:
enabled: true
format: rtcm3
path: ttyMFD2:38400:8:n:1:off
send position to base: 'off'
type: serial
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 24
overwrite: true
raw:
format: UBX
started: true
version: null
solution:
format: LLH
started: true
version: null
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:38400:8:n:1:off
type: serial
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh_ext
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: false
glonass: true
gps: true
qzss: false
sbas: true
snr mask: '15'
update rate: '5'
I tested the pins on reach rxpin show this:
Base correction is open, streaming;
Base correction is close, stopped streaming;
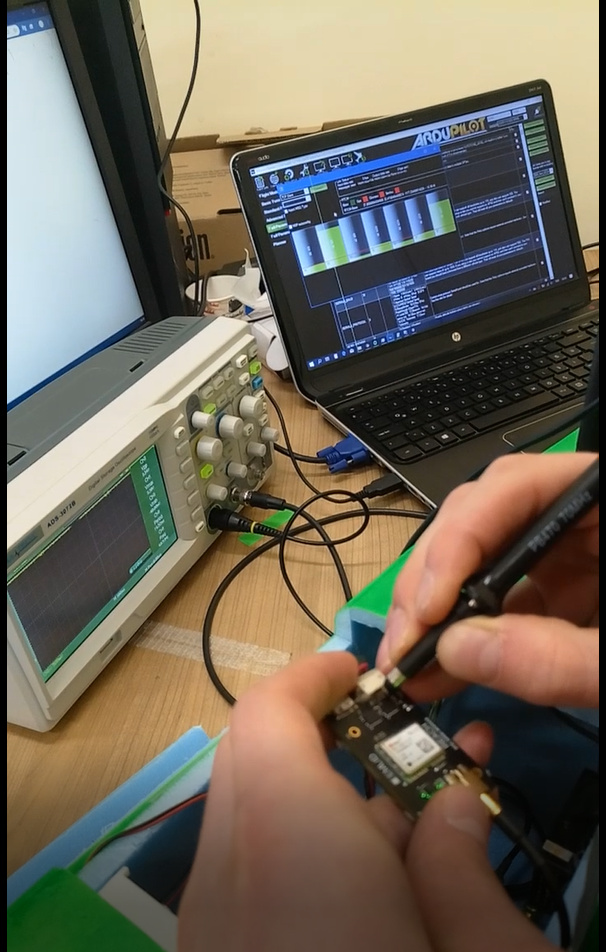
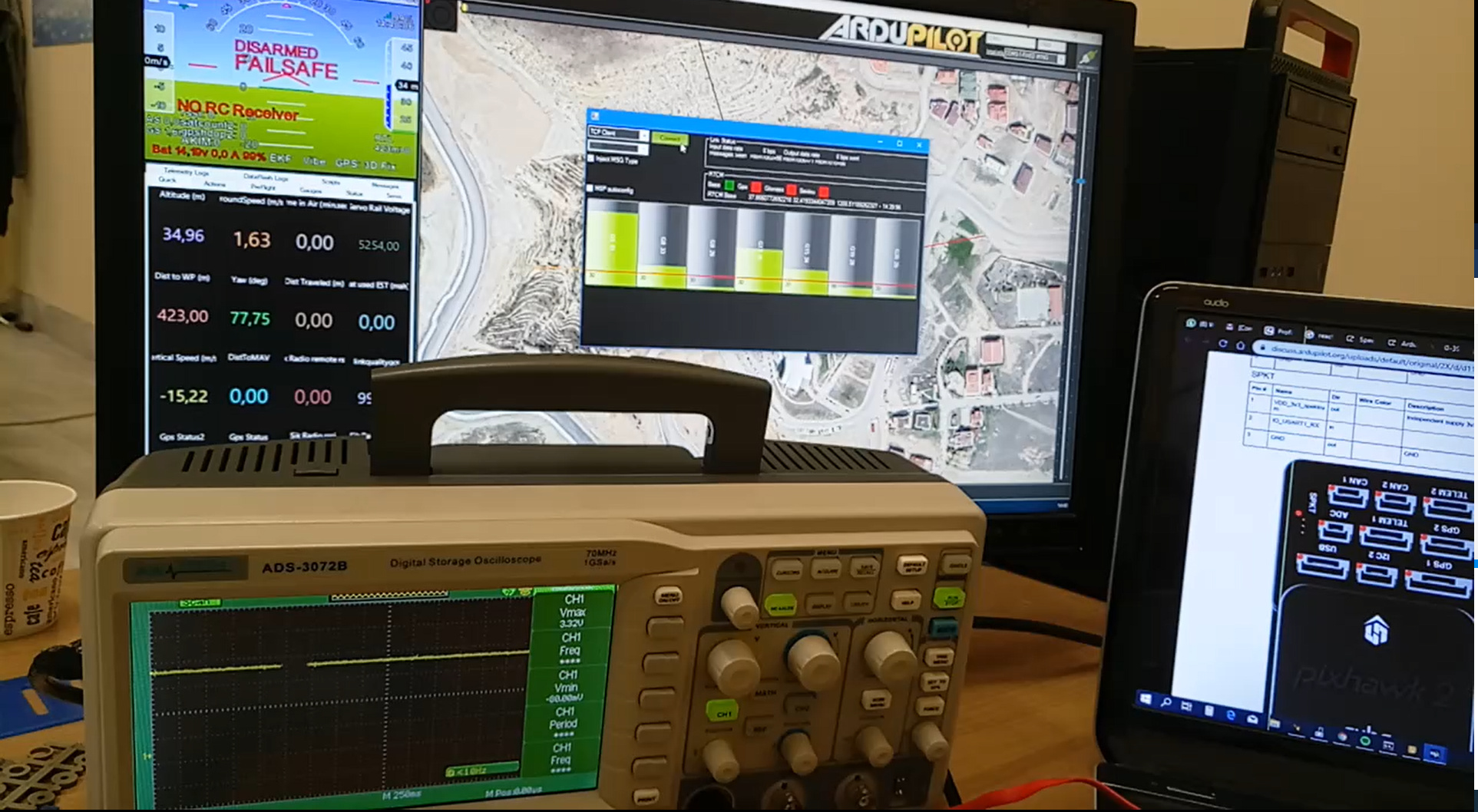
Oscilloscope display shows signal. But I don’t know if it’s true.
If there is no other problem, I would like to re-solder the socket’s soldering ways.
gleb.gira
December 11, 2019, 1:28pm
15
Hi Kadir,
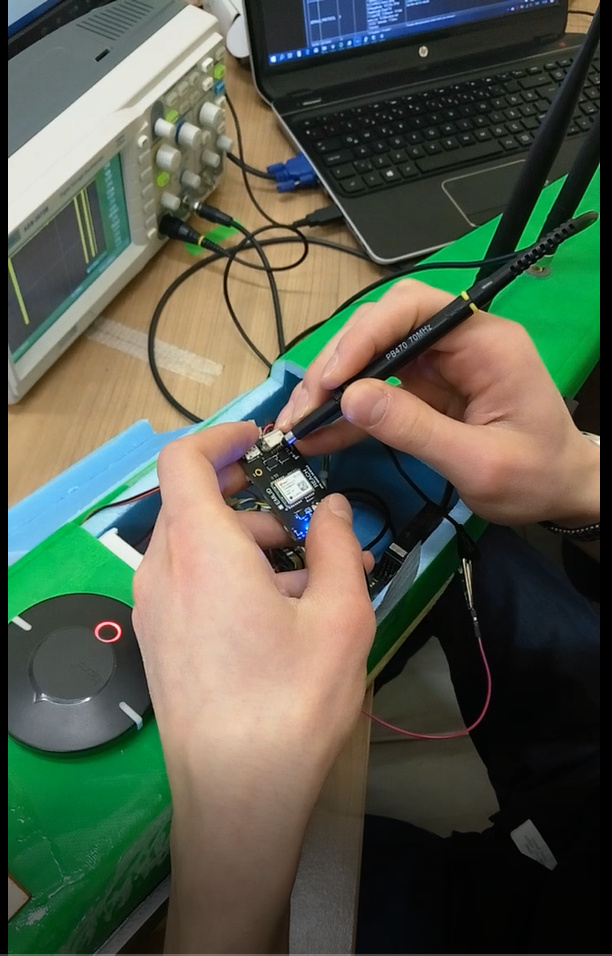
May I ask you to check the signal on the PixHawk UART TX pin with an oscilloscope? Please send us the photos of the display with enabled/disabled base corrections.
Hi Gleb,
Disable corrections;
Enable corrections;
Pixhawk tx pin connected Reach rx and I measure it.
gleb.gira
December 13, 2019, 2:27pm
17
Hi Kadir,
Is it possible to connect your radios directly to Reach RTK and Reach RS? We want to check if your radio module can transfer base corrections.
Hi Gleb,
I did what you said, nothing changed . But today we made a detailed examination on reach and decided to re-solder the circuit paths.
Thank you very much for your help.
2 Likes
system
April 1, 2020, 4:22pm
20
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.