



Hello everybody,
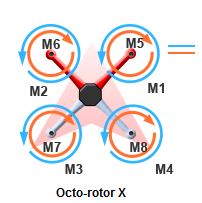
I have an Emlid Edge System in my octorotor X frame for the first time.
Unfortunately, I have nowhere found on which pins and what order the motors are connected?
Motor 1, 2, 3,4, 5, 6, 7, 8
In addition, the question where exactly, at which pins are the relay outputs defined?
thanks in advance!
Hello,
Arducopter Wiki is the place to look: http://ardupilot.org/copter/docs/connect-escs-and-motors.html

Your setup is not good…
Relay output could be 9 to 12.
https://docs.emlid.com/edge/qgc/rcinput-and-output/#relay-switch
Marc
Dear Marc, thank you very much for your help.
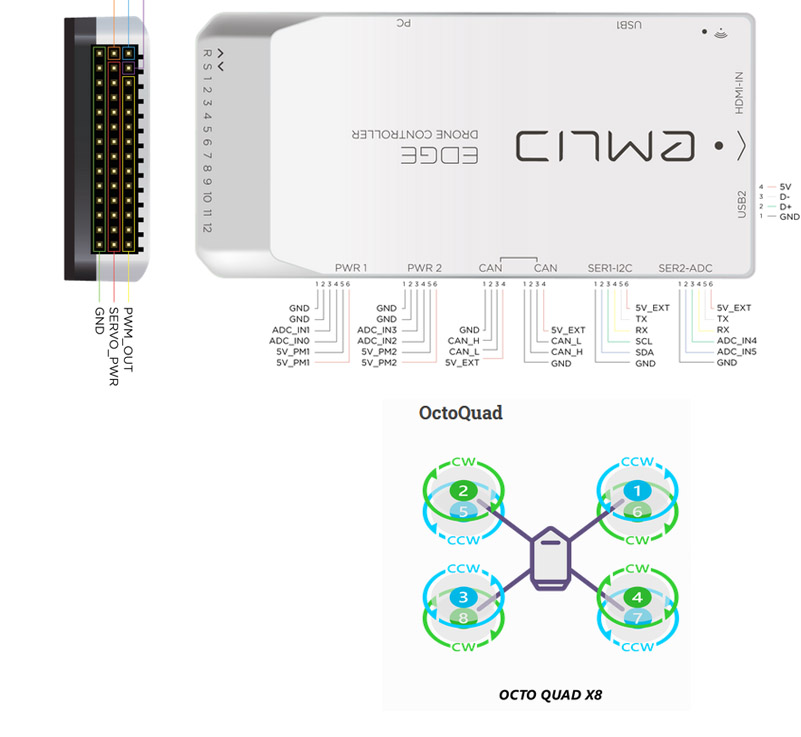
I must say i have an EMLID Edge Controller and not an Pixhawk Controller, so i´m difused how to connect my 8 ESCs.
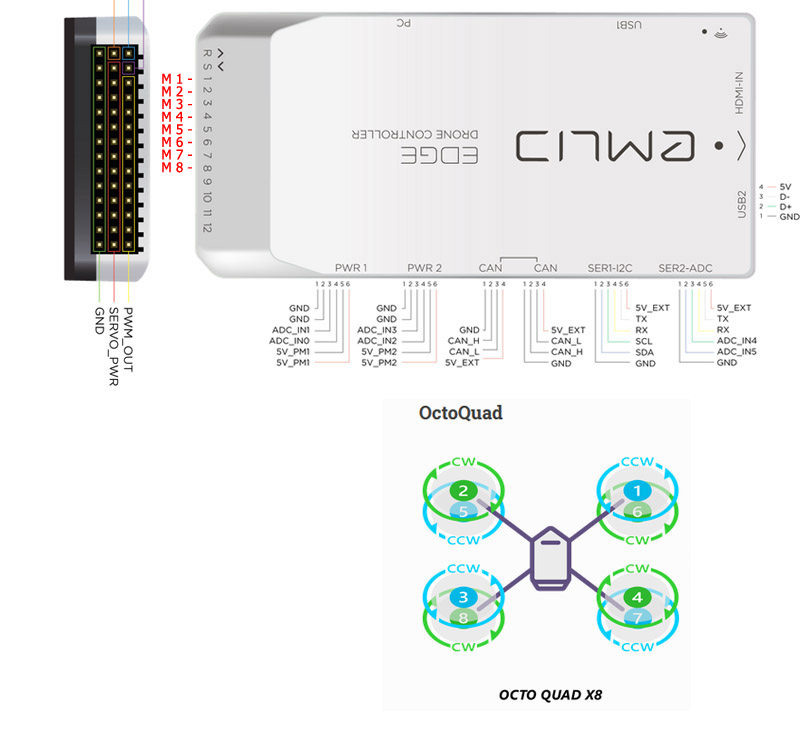
Here i made a graphic from my situation, hopefull someone can help me.
Thanks in advance!
Hello,
No confusion: Emlid Edge is an Ardupilot (Arducopter) compatible unit.
So, Arducopter wiki is relevant for the most part. ( Edge QGroundControl version is different from standard used with Pixhawk )
ESC 1 to 8 have to be plugged on Out 1 to 8 of Edge.
Out 9 to 12 are free to use with accessories (Camera and gimbal control, external lights,…)
https://docs.emlid.com/edge/hardware/connection-schemes/
RC in (your receiver) is on R>
S< is an sBus out (use to be confirmed by Emlid)
Marc
Hello, that’s exactly how I did it.
But when I do the engine test in the QGroundcontrol software, the order of the engines is not correct.
The motors are marked in the software with ABCDEFGH.
If A is the engine number 1 and B is the engine number 2, then this does not correspond to the official engine order the standard is for Quad X Octocopter.
Motor test order:
A1, B6, C4, D7, E3, F8, G2, H5
Sorry, it is not easy and maybe not well documented.
Clockwise from front right, top then bottom to front left. http://ardupilot.org/copter/docs/connect-escs-and-motors.html#checking-the-motor-numbering-with-the-mission-planner-motor-test
Marc
So i understand the logic behind this order.
I hope that EMLID will describe this in their software or in their documentations.
Many thanks for your answers!
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.