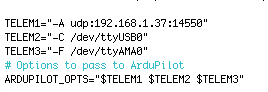
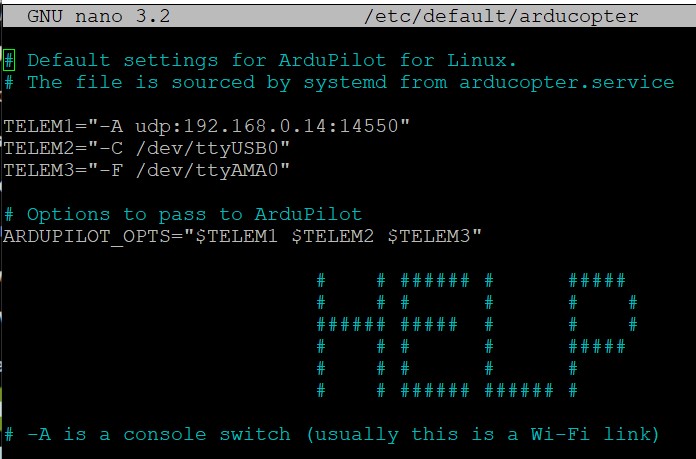
TELEM1 is wifi UDP link is serial 0 at 115200
TELEM2 is serial 1 telemetry on USB0 -C /dev/ttyUSB0 is serial 1 at 57600
TELEM3 is Range finder (TF Mini) on UART
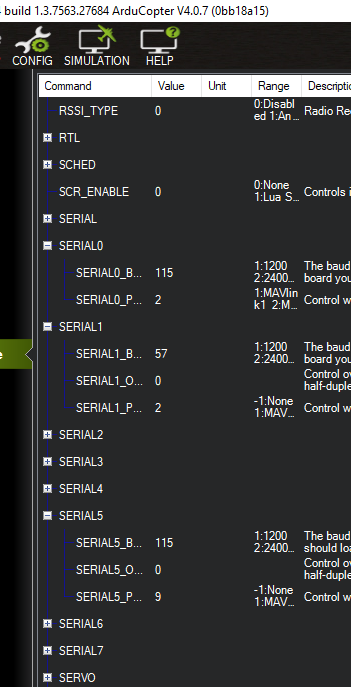
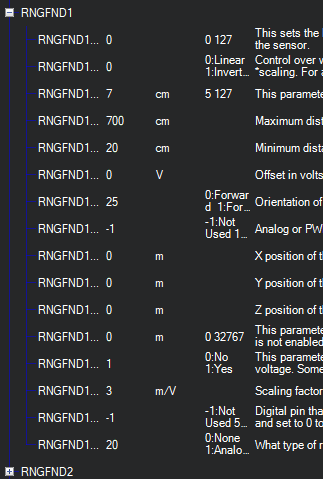
I have the same settings as you in the serial 5 option and i changed the rangefinder 1 to be 19 for the tf02 in the full params list on mission planner.
As the uart connection is still not working and I’ve tried to see incoming data using the command below but getting gibberish
As we don’t have the rangefinder at our disposal, we haven’t had a chance to test the setup ourselves. Let’s check whether it’s possible to troubleshoot this remotely.
At this point, as I understand, the data is being output from the rangefinder and received by Navio2. However, the data is not accepted by Mission Planner. It’d be helpful if you answered the following questions:
is it possible to connect TF02 to the other port?
have you tried setting the different baud rate?
have you tried tweaking some of the parameters and reloading Mission Planner to see if it helps?
have you tried checking the rangefinder with some other device? Does it work with is as expected?