



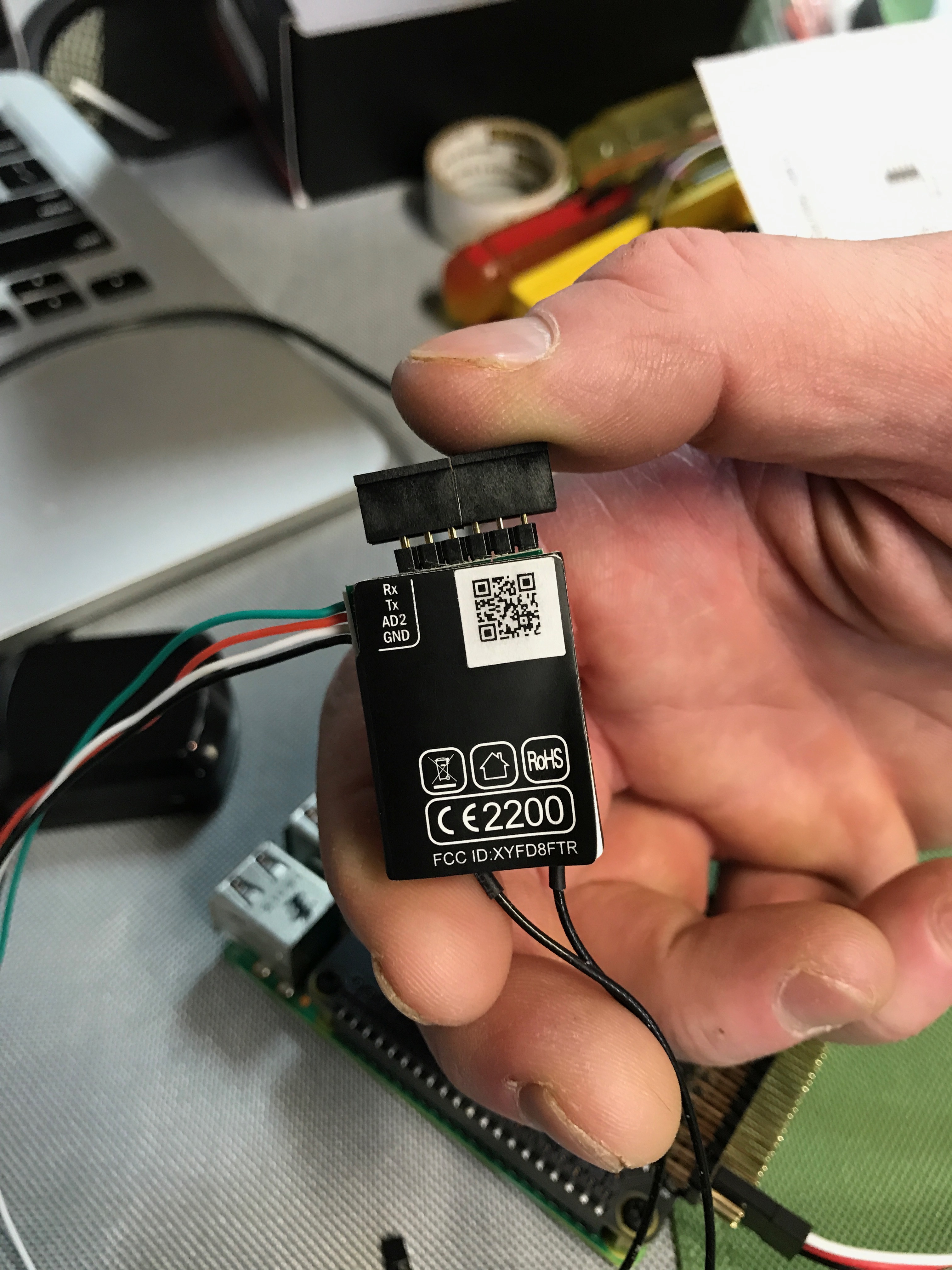
I am trying to connect the NAVIO2 to the D4R-II receiver. How can I tell which of the RX/TX/AD2/GND pins connect to the pins on the NAVIO2 PPM/SB header rail? The wires that came with the NAVIO don’t seem to fit to the receiver.
You have to put a jumper over the signal pins of CH3 and 4 of the D4R-II, it will then output a ppm signal on CH1. The port on the side of the receiver is meant to be used for telemetry sensors or a telemetry connection to a flightcontrol.
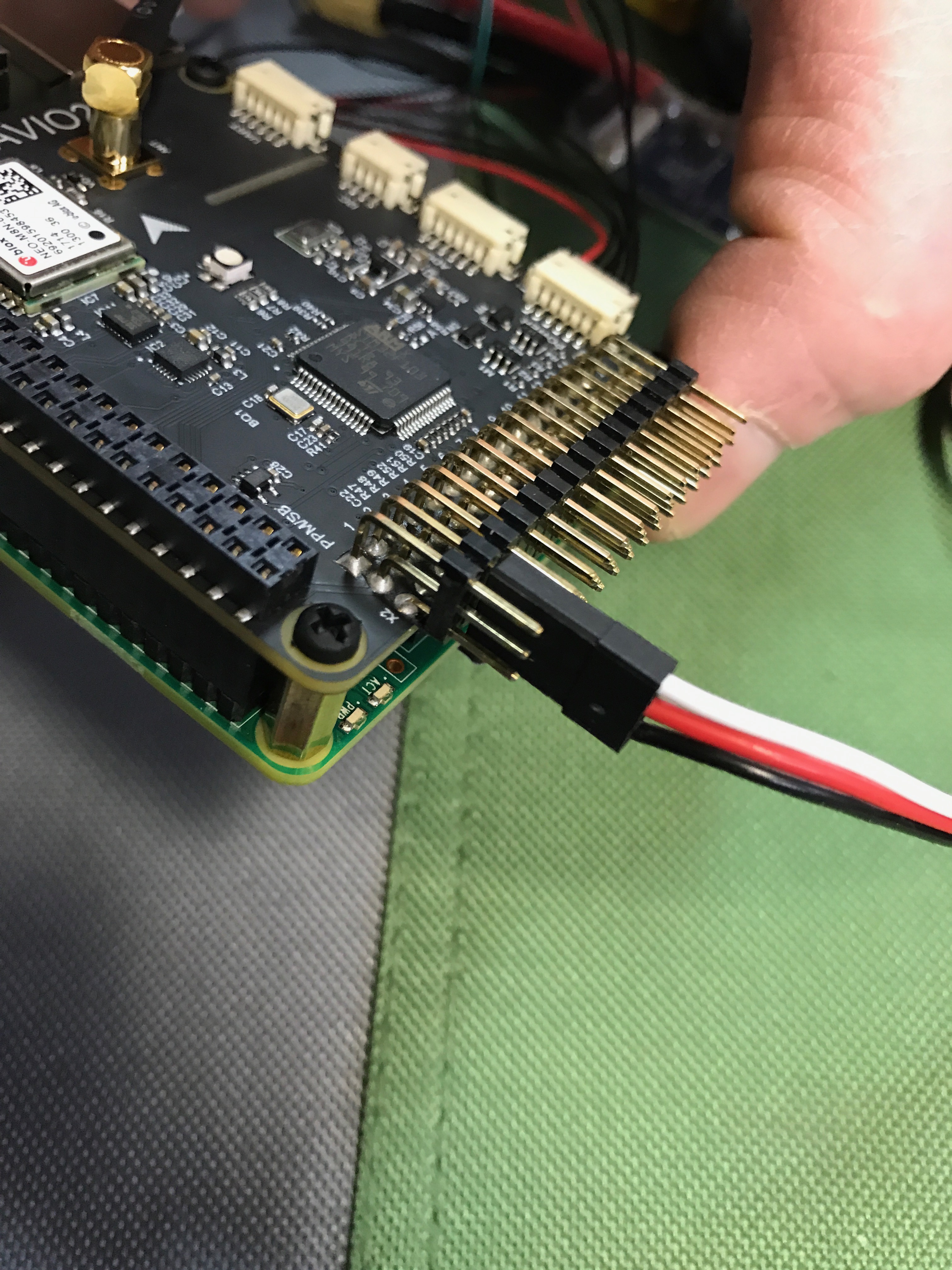
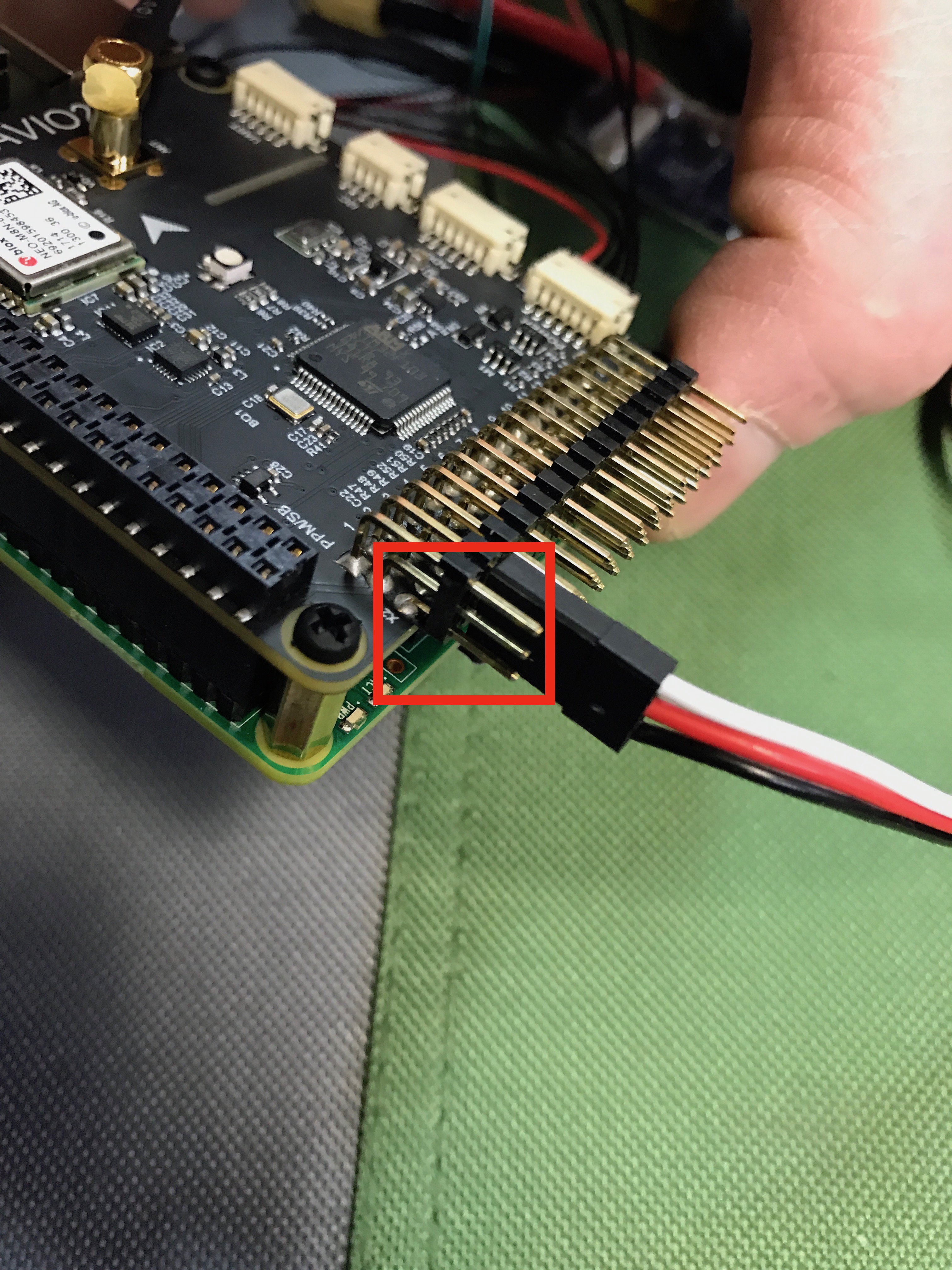
I see. Thank you for clearing that up! I still don’t understand which Channel on the DDR-II maps to which of the 3 (top, middle, bottom) pins on the NAVIO header rail? I could not find any pinouts or other diagrams about this rail in the Navio docs.
It does not work this way. 3 channels would be a bit few to control most rc vehicles.
Navio expects a ppm or sbus signal as rc input. Both use only one wire to transmit 8/16 channels. The D4R-II outputs ppm on channel 1, so you use one 3 pole servo lead and connect white to the upper pin of the Navio rc input (red middle, black bottom), you then have 8 channels to control your vehicle.
The channel order of the 8 channels depends on the settings/manufacturer of your rc transmitter. By default ardupilot expects the first 4 channels in AETR order. This stands for Aileron, Elevator, Throttle, Rudder. Most modern rc transmitters have the ability to change the channel order, or you can set ardupilot to another channel order.
Thanks Sebastian! We got that cleared up.
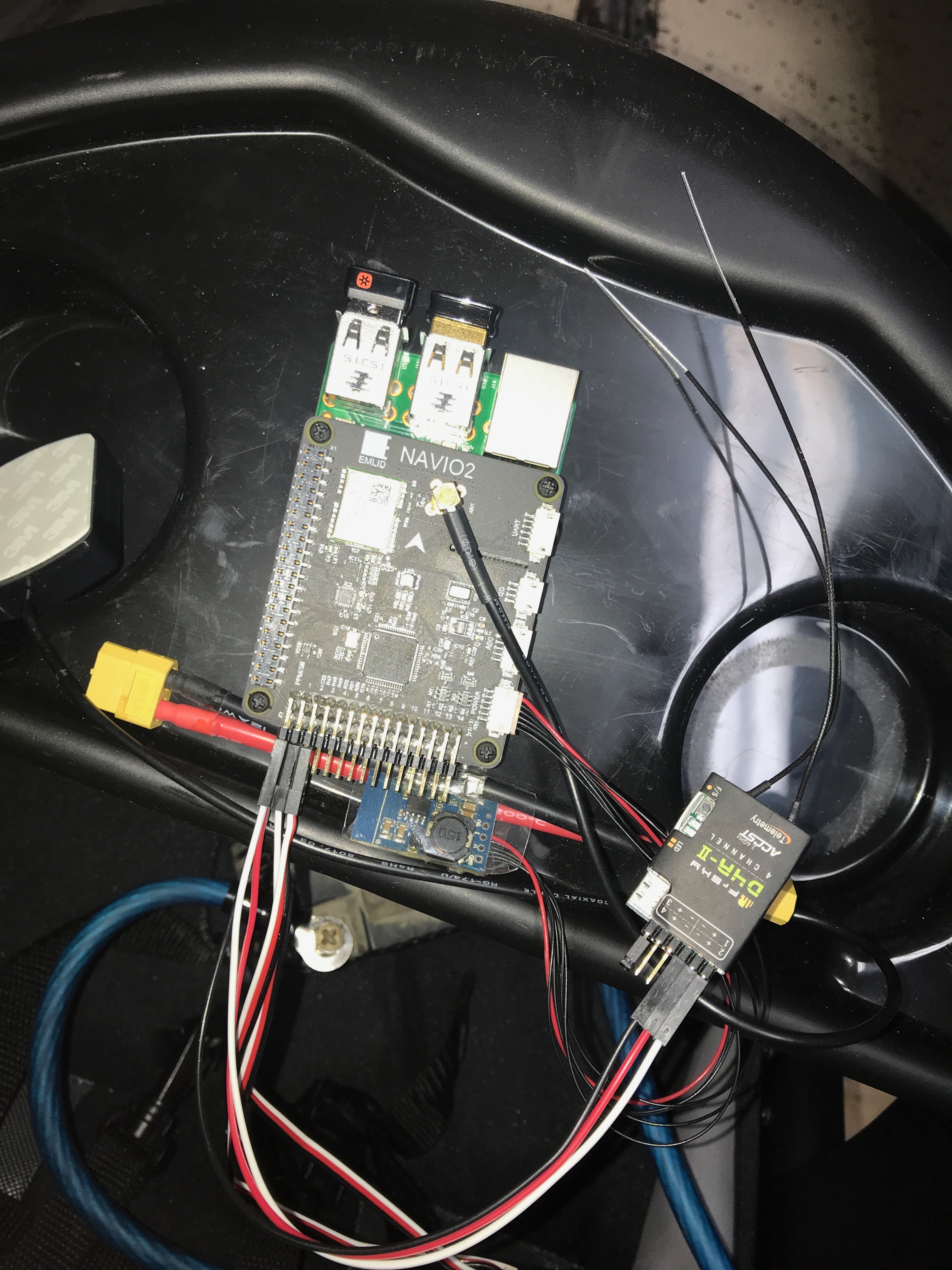
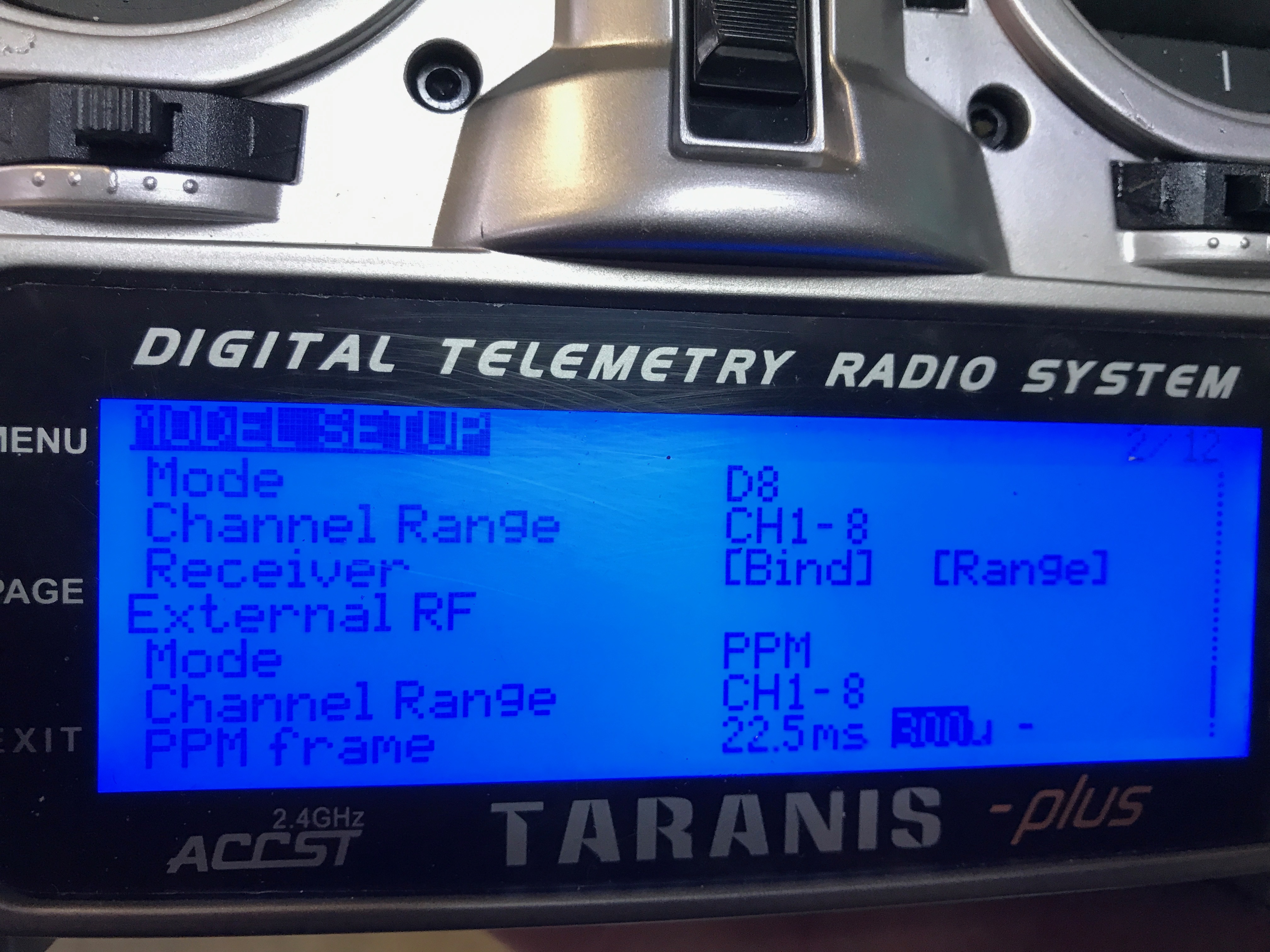
Now it appears we are having a problem splitting the PPM signal. We are trying to drive 2 motors using an X9D Taranis transmitter and D4R-II receiver (also tried X4R SB), but only one ESC will see a signal and only ever on CH1. We are beating our heads against the wall trying to figure out what we are doing wrong and what we need to do to get the signal to control more than one motor. Thanks for any help you can offer!
@Scott_Nelson
The Taranis has the 4 main channels configured by default. Those are controlled by the sticks. You will need to configure at least one switch on the Taranis to control another channel, so you can change flight modes.
You also need to setup ardurover, so it knows what you want to control with the different outputs of the Navio.
You want to control two motors, so I guess you want to control a skid steering vehicle.
Look for the servox_function parameter in the full parameter list and set one output to 73 and another to 74.
1 Like
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.