I’m prepping the other two SD cards (one for AC 3.4 unstable and one for AC 3.4-rc1). All params will be the same except the ones related to accel cal and mag cal. I will also see about the compassmot.
@george.staroselskiy
Okay, see below. I did what I could before my laptop died. I will provide information about the setup of each flight ABOVE the individual logs. Anywhere where it maps the quad outside of that parking pull-off or over the road is NOT accurate. The flights remained over the pull-off and the road only. Throughout all of these were various EKF Velocity errors, EKF horiz position erros, EKF vert postion errors, and of course EKF compass errors. I could not get a stable Loiter in ANY of these flights. ALT hold was bouncing around too. It’s a struggle to varying degrees to keep the quad where I want it in stab mode (and I know how to fly RCs). Sometimes in loiter mode the quad would only drift by a few meters, whereas other times it would have SERIOUS errors and start to fly away (of course I switch it to STAB mode at this point). The last Navio2 3.4unstable flight resulted in a crash IN stab mode (only from a meter up). Just a broken landing gear leg, nbd.
Navio+ AC3.3 – Stock params except rc cal, accel cal, mag cal, compassmot, various camera trigger params, batt volt and curr params, etc. I only altered the mag/compass information for each of them. The params that should remain the same did remain the same.
Compassmot was applied to this run. Live mag calibration at the flight sight.
Compassmot was NOT applied to this run. Live mag calibration occurred after the previous flight and after compassmot params were set back to default. Mag cal at flight sight. I could not get a GPS fix for this flight despite JUST having one (along with a good sky view). Not sure what’s going on with that… Connection was fine. I always get a quick fix here.
Navio2 3.4 rc1 – These Navio2 runs (rc1 and unstable) shared all the same basic params: rc cal info, accel cal info, battery and camera trigger info, etc. Again, the differences here lie in the various mag/compass params. See below. I couldn’t do the compassmot in the field due to time constraints.
Onboard mag cal at field sight with Compass2 enabled. Basically setup how the docs says to. No compassmot.
Same onboard mag cal as above but with Compass1 enabled. No compassmot.
FLIGHT3: New onboard mag cal at field sight with Compass1 enabled. No compassmot. I could not get a GPS fix on this flight, and I always get a fix with the Navio2 board, even in my bedroom…
FLIGHT4: Same setup as Flight3 (above) but a GPS fix all of a sudden…
Navio2 – 3.4 unstable
Live mag cal at flight sight with Compass1 enabled. No compassmot.
New live mag cal at flight sight with Compass2 enabled and Roll_180 selected. No compassmot.
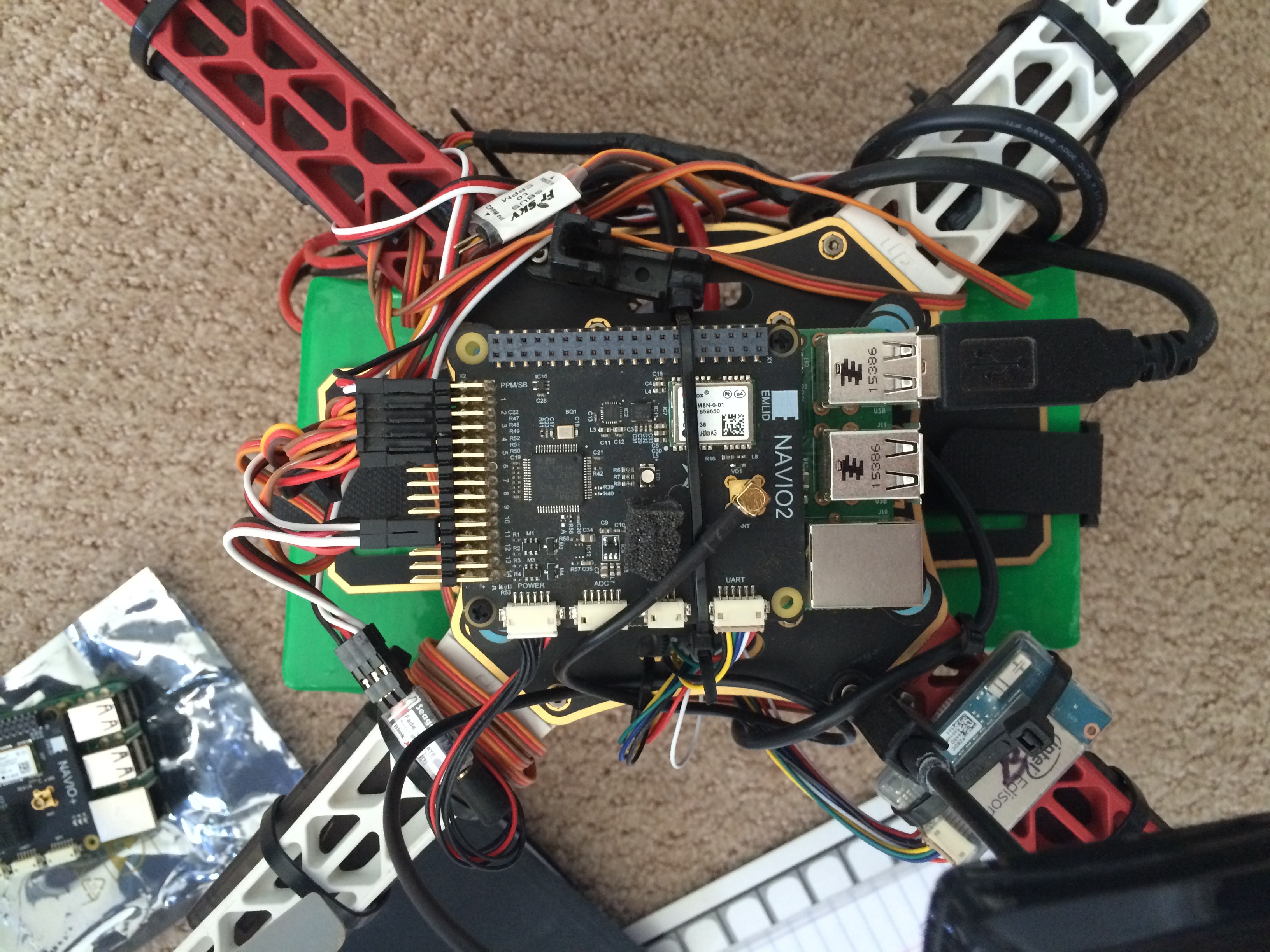
Also, maybe it’s my setup (see picture)? Is it the Reach (the onboard Reach wifi is connected to my laptop…)? I’m running 2x 3s batteries in parallel. They are as far away from the board as I can get them. Maybe it’s the servo wires? I don’t know. I disabled the camera wife that’s mounted underneath. The Navio+ and Navio2 are using RPI3’s with identical hardware setups (except the SBUS to PPM converter). Using the 20160408 image. Navio+ is running AC3.3. Navio2 is running AC3.4Unstable or AC3.4-rc1. AC3.4Unstable was not updated or upgraded in the terminal. Straight-up 20160408 image. AC3.4-rc1 was compiled from source a few days ago.
Nothing is really working. Short of installing this 3DR GPS/compass combo that’s coming today, I’m not really sure what to do…
Also, I forgot to set armed logging for the Navio2 runs (I use a different Mission Planner for Navio+ and Navio2).
If anyone (that reads down this far) has a working quad with no EKF issues with great loiter capabilities, can you send me a recent dataflash log so that I can compare.
Update: I went out to the same flight location today and flew. All things being the same, with the exception (major) of the 3DR GPS/compass addition. This external compass was enabled/calibrated and I had ZERO EKF errors of ANY type. I tried EKF1 and EKF2. They both worked fine. I used only the 3DR GPS and only the 3DR compass (disabled the two onboard compasses).
So you solved the issue with a different GPS? Was that on your N+ or N2?
I’ve been watching this thread because I have a Navio+ showing same issues you describe on an F550 hex. (Random EKF and vert pos variances when in GPS modes. In stab modes it is flyable but extreme drift) I’ve attempted isolating all possible causes for interference with no improvement. I think I could have a vibration somewhere but I am not proficient at analyzing logs for that just yet.
If your quad does not fly well in Stab mode, you have other problems than the compass.
In stab mode, the quad does not use the compass, GPS or barometer. So first thing to check is vibration (are your props balanced?), is the Navio/RPi mounted with some vibration isolation? Are any cables attached to the Navio/RPi that are stiff or pulled, therefore passing vibes ontot the board?
Check that first, go also into your log and see the Vibe values (or post your log here). Check here for more info:
Yes, I used this unit (GPS/compass combo) and set it up accordingly. It solved all of my EKF error issues. @markvanhaze 's route is cheaper and should get you the same results. I didn’t want a THIRD pole on my quad, so I opted to switch out the GPS that came with the Navio2 for the 3DR combo. My first flight with the Navio+ was here, where I was still receiving EKF errors. I suspect if I mount the external GPS on it that it will be okay too.
George, MP 1.3.39 was released yesterday. Should we continue doing Onboard Mag Calibration rather than Live Calibration? Also, did you experience this issue with APM Planner as well?
I also have a Navio2 on a PI 3, same errors as above.
Is it only SOME users experiencing these errors or ALL?
Is this erred only with Copter? Does Plane work?
It is very disappointing, this product is marketed well, and brilliant in its concept but if it’s not a stable flying platform it’s USELESS.
When are the developers going to either come with a better gps/compass module or fix the firmware? Don’t mind paying more for a compass module that actually works.
Here is related issue, I do not think that anything has been changed in new MP regarding this issue. For now we suggest using onboard calibration, it is faster as well.