



Successful calibration and flight today! After installing the new release I calibrated and it recognized both compasses, results below.
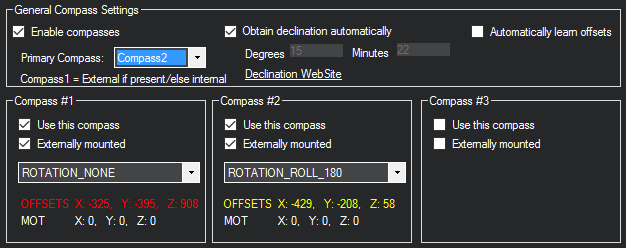
Compass 1 has the same offsets, but compass 2 is within reason and I set that as my primary. After the rest of the calibration I did a test flight and stabilize worked great. Thanks for the fix guys!
On a separate note however, I am still having issues with althold mode. I have made a separate post for that, found here.