If you spend enough time around GNSS, mapping and so on, you’ll see a total-station mentioned as the source of truth. This is to a large extent also true, but as all other measuring-tools, it also has its downsides. The total-stations clear upside is it precision and its rooting in something physical. The biggest downsides are the time-consuming setup and the constant attention to minute details in its handling.
A total station can measure down to milimeters (if you spent enough time and effort), whereas a Emlid Reach RS2 can roughly 1.5 cm + 1 ppm in RTK mode.
So what happens when we measure the same set of points with both a Total Station and the RS2 (using a short baseline)? Let’s see if the RS2 stays within the stated standard deviation.
The project was started by measuring 3 backsight points and the occupy point for the Total Station. After that 5 additional points, arranged in a ~40 cm pentalope shape, were measured. An obs-time of 5 minutes was used for all points. GNSS baseline for the penta-points were around 10 meters.
After dodging a lot a small, but intense, showers, I could finally get the Total station set up. All the Penta-point where measured with both face 1 and face 2.
And the results? Around 0.6 cm average difference, that’s a big pass in my book!
Here the table showing all the differences, along with the RS2 stdev for the given base line:
Point ID
Northing
Easting
Elevation (MSL)
3D Delta Distance (m)
Specification (stddev, m)
Distance to TS_OCCUPY (m)
1_GNSS
1131832.608
582422.376
36.267
0.0058
0.01565
1_TS
1131832.605
582422.38
36.264
3.927485328
2_GNSS
1131832.907
582422.453
36.266
0.0033
0.01579
2_TS
1131832.906
582422.456
36.267
4.196599218
3_GNSS
1131832.943
582422.74
36.268
0.0066
0.01579
3_TS
1131832.941
582422.738
36.262
4.168628192
4_GNSS
1131832.613
582422.868
36.269
0.0045
0.01577
4_TS
1131832.609
582422.868
36.267
3.818726227
5_GNSS
1131832.461
582422.623
36.272
0.0099
0.01577
5_TS
1131832.458
582422.626
36.263
3.720515153
BS1
1131921.208
582357.04
35.68
113.799865
BS2
1131830.455
582480.438
36.475
56.9431131
BS3
1131823.721
582366.332
35.845
57.41674973
TS_OCCUPY
1131828.846
582423.518
36.268
The following gear was used:
2 x RS2 in RTK Kinematic mode
Leica TS-06 Plus R500
Fieldgenius 10 on Getac data-collector (used with both instruments)
I don’t know what kind of gun you are using, but ours can be setup faster than a base station and a prism doesn’t have to be booted. The real downsides to a total station are that they are limited to about 800-1000ft and by lighting conditions.
Christian, thank you for taking the time to do this interesting project! I was delighted with the results of the RS2 units. against the total station
Hard to beat the accuracy of a total station, but they do have their downsides.
Like Michael mentions, light conditions, also typically a two man operation unless your fortunate to have an robotic total station and the cost of the unit, at least compared to two RS2 receivers. But it all depends on what your requirements are for the task at hand. Each has their own quirks, like nearby cell towers can cause interference with the RS2 in trying to get a fix I have found. Overall, I’m very pleased with the performance of the RS2 receivers so far.
It not so much the project setup (pretty easy in FieldGenius), if that is what you refer to, but the physical setup of backsight-points, levelling/centering, setting up shade for the total station if it is sunny etc. And then the danger of bumping the tripod in the middle of a set, so you have to re-do the set and so on. Many pitfalls, when it has to be really exact.
No doubt you have your own experiences. In our experience if you were talking about initial setup they are close to the same because of the time it takes to establish a GNSS base station and longer occupations on the rover to set points as control. We run a level loop regardless of what equipment we are using.
As far as a day-to-day setup we check into two points with gnss and we respect to points with the instrument. We are lucky enough to have robotic total stations so that is a plus. Even with a conventional instrument it iseasy to set up anywhere and resect two points whereas you have to set additional base points if you are getting out of range. I agree on the stability of using the robot manually, but it is rare that it is ever Disturbed. With a robotic instrument it doesn’t happen.
I think my experience comes from the immense amount of walking required when operating a manual total station for my self If it was a robotic total station, the walking around would be sooo much less.
Hello Christian,
Thank you for doing and sharing this work which reassures us more and more of the reliability of EMLID receivers
I would just like to add a few remarks.
To make a more correct comparison I have to think about:
1- Transform all my data from the World System (WGS84) collected with my EMLID Receivers to the Ground System.
2- Use a calibrated Robotic total station with an angular precision of 1 second and ATR (Automatic Target Recognition) function calibrated with 360 degree reflector prism, otherwise if I use a mini prism I must orient it well towards the device.
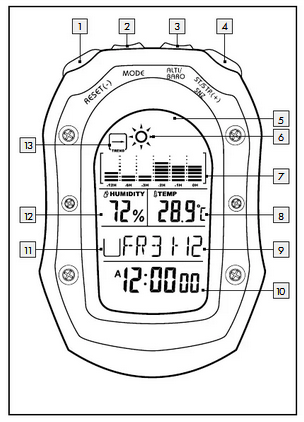
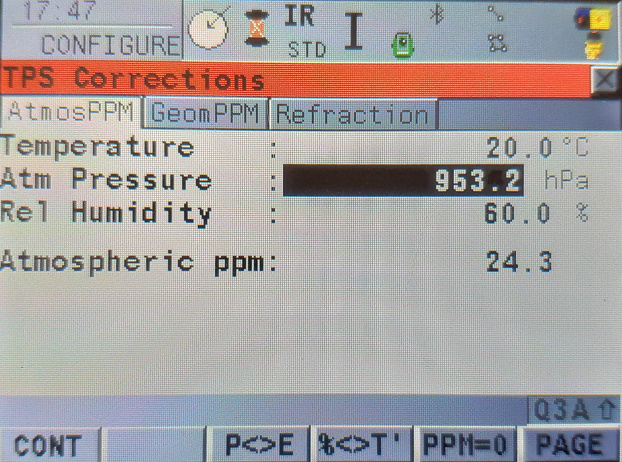
2- Use Handled Weather Station for TPS Corrections (Temperature, Atmospheric Pressure, Relative humidity) to correct EDM (Electronic Distance Measurement).
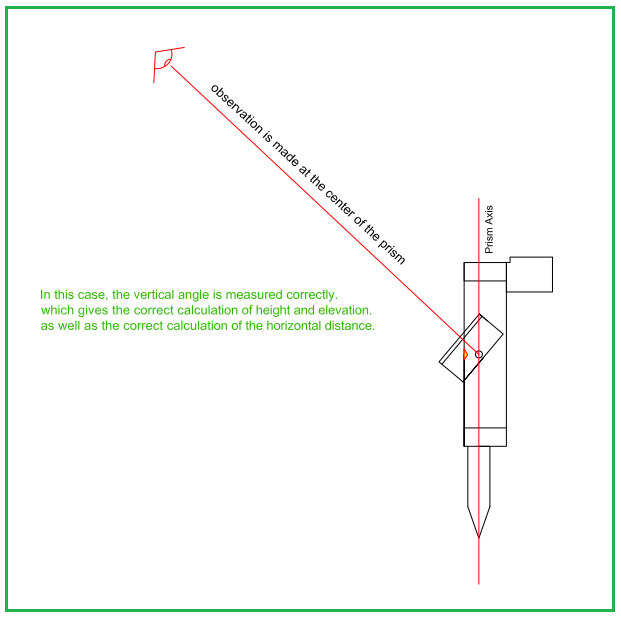
(BTW, the illustration you posted also shows a nodal prism)
I don’t see a specific why either a robotic or 1 sec angular precision should be required for this test, as observation distance is so short. Neither would I use a 360 deg prism for this (at least it should be a miniprism then).
Pressure and temperature was input into the instrument before starting. But again, taking the distances into account, PPM doesn’t really matter here.
I disagree here. This approach would mean a disadvantage for one or the other party. If I use a GNSS rod at 2 meters height I would introduce unnecessary angular error from the height of the GNSS rod.
If I mounted the GNSS antenna of the 0.208 m high (in my case, see the pictures of the prism) stand, it would unnecessary problems with blocked sky-view and also introduce a much higher risk of multi-pathing.
Yep, still not a fan of that approach. You will take away potential precision from the Total station, when the prism is mounted that high. The only reason we mount GNSS receivers that high is because of the sky-view and the mitigation of multi-path.
























 Looks like some pretty intricate measuring to get the exact phase center of the receiver… We even have to account for rod slack and tip wear.
Looks like some pretty intricate measuring to get the exact phase center of the receiver… We even have to account for rod slack and tip wear.