



I have a Topcon Legacy (L1/L2) set up as a network base in my office, is it possible for my reach unit (L1 only) to receive and use corrections from the base?
Yes that is possible. Reach will just only use the L1 data of the RTCM data stream.
1 Like
Will it work the other way? L1 base sending corections to L1/L2 rover? What about accuracy?
I guess it works aswell. Depends on the RTK algorithms the Topcon is using but that’s just guessing. Don’t know if a L1/L2 GNSS Receiver will refuse to compute solutions with L1 only.
Which one to use as rover depends on the environment of the base location and the location where the rover will be surveying. My guess is, that the Topcon has got a better antenna than the Tallysman of the Reach so it can handle multipath and bad signal environments better. So if the base is unobstructed I’d set Reach up as base and take the Topcon out as rover.
As for accuracy there shouldn’t be much difference between Reach as base and Topcon as rover or the other way round. Even the accuracy with L1 only is kinda the same as L1/L2 or even L1/L2/L5 as long as you have unobstructed areas and short baselines.
That’s my understanding of the theory and haven’t tested it. I have tested Reach with a Topcon GR3 as base but didn’t try the other way round.
Maybe someone else can share his 2 cents and either support my view of things or tells a different story 
1 Like
Thank you!
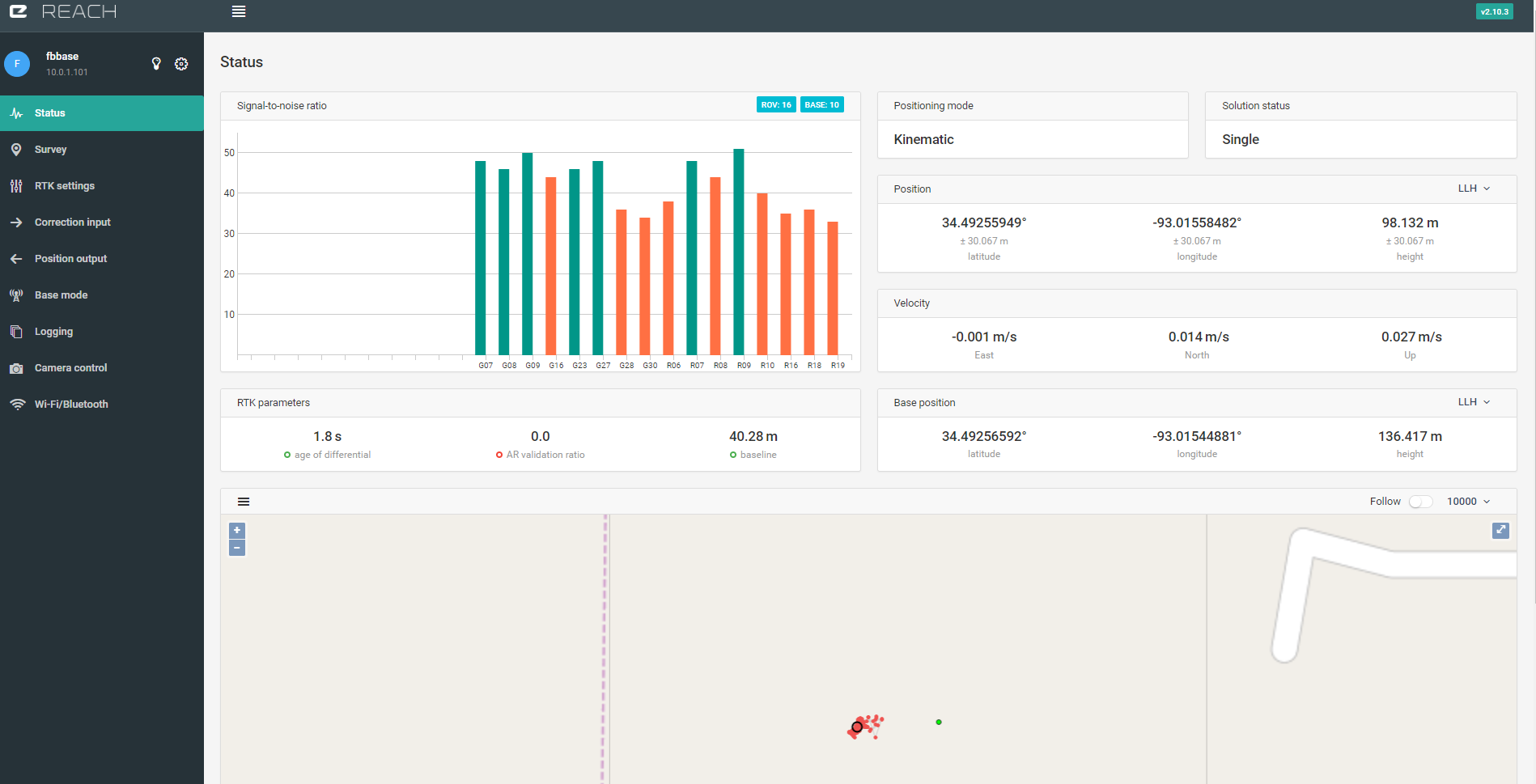
I have another question. When connecting both my reach units to my L1/L2 base, I connect successfully, yet I’m not seeing any gray bars showing the Bases individual Satellite signal strength. I do see, in the upper right corner of reachview, two red boxes indicating the number of Rover and base Satellites.
Ant ideas?
Please provide more information. A system report on Reach and incoming RTCM messages(available on the Correction Input screen).
I checked nmea checkbox, this is the error:
[FBLS]: 1st NMEA-183 Sentence Detected from Client #C005 ‘mwfoshee’: NMEA inputs are ignored for this user.
[FBLS]: Was: [$GPGGA,224008.31,3429.5638246,N,09300.9311692,W,1,10,1.0,131.446,M,-28.836,M,0.0,*78 ]
Working on screenshots
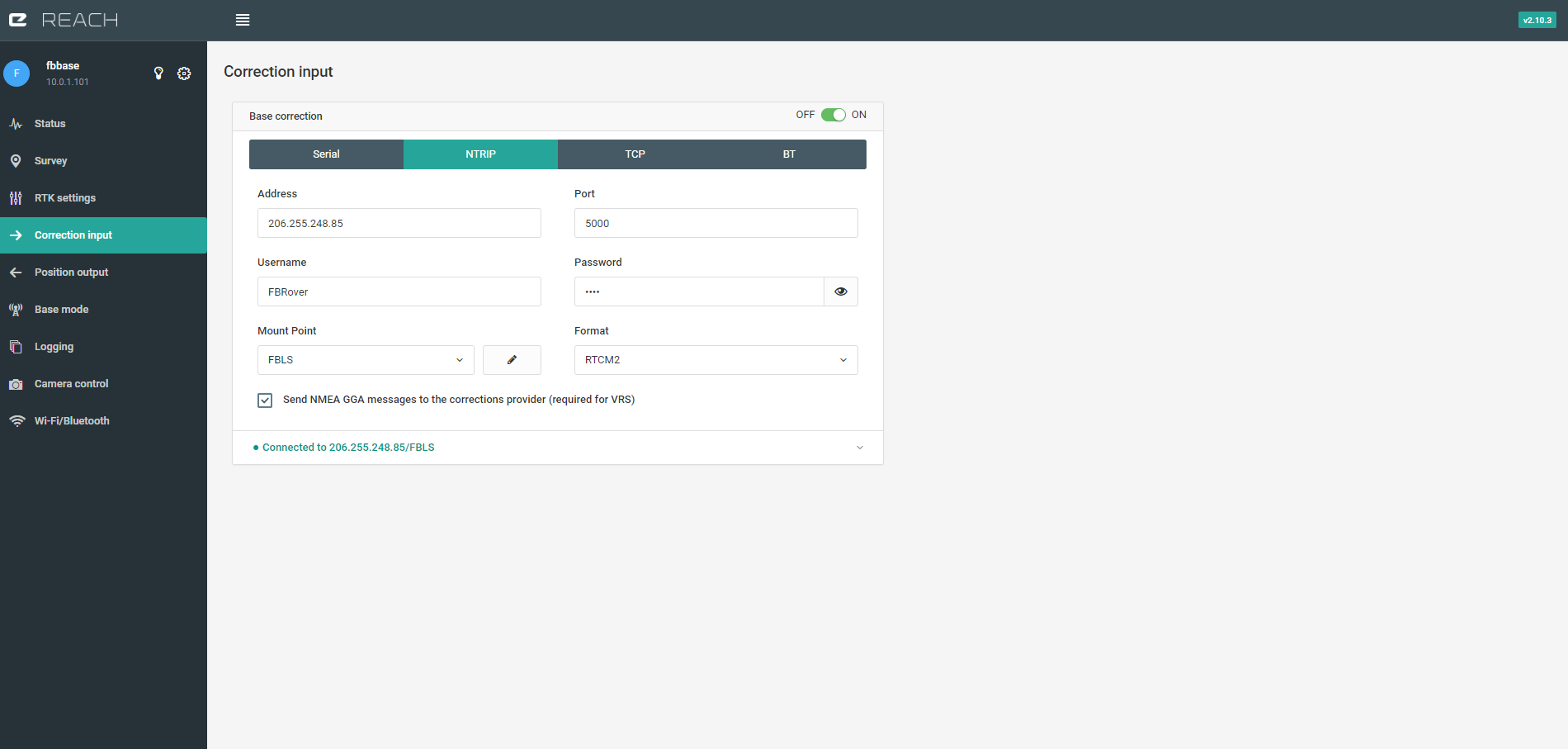
Here is a screenshot of the correction input screen, I don’t see a system report of any kind, what am I missing?
password is 1702 if you want to try yourself
In the above screenshot, it says “connected to …”
Did no more lines show up at the bottom in green? What about after refreshing the screen after waiting a minute? The RTCM message types received from your base should be listed there. That is what Egor was wanting to know.
Your system report is available in the ReachView settings. You can read about it in the docs:
https://docs.emlid.com/reachrs/common/reachview/settings/#system-report
I’ve left it up for more than an hour, No grey bars (first screenshot) ever and on the second screenshot, the only line was “connected to …”, even after refresh and waiting
I’ll read the docs in the link above and post later.
Thanks @bide
Simple Report:
[details=“Simple system report”]
app version: 2.10.3-dev-r0
'wifi_status, interface: wlan0':
- Client state
- IP address: 10.0.1.101
mac address: 90:b6:86:02:09:38
ssid: HSCS
base mode:
base coordinates:
accumulation: '0.1'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '34.293323727'
- '-93.005561567'
- '136.31'
format: llh
mode: manual
output:
enabled: false
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '10'
'1006':
enabled: true
frequency: '10'
'1008':
enabled: true
frequency: '10'
'1010':
enabled: true
frequency: '10'
'1019':
enabled: true
frequency: '10'
'1020':
enabled: true
frequency: '10'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: true
frequency: '10'
'1117':
enabled: false
frequency: '10'
'1127':
enabled: false
frequency: '10'
bluetooth:
discoverable: true
enabled: true
pin: '***'
camera:
duty cycle: 20
enable: false
period: 2
polarity: true
correction input:
input2:
enabled: true
format: rtcm2
path: FBRover:***@206.255.248.85:5000/FBLS
send position to base: single
type: ntripcli
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: true
version: null
correction:
format: RTCM3
started: true
version: null
interval: 86400
overwrite: true
raw:
format: UBX
started: true
version: null
solution:
format: ERB
started: true
version: null
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:57600:8:n:1:off
type: serial
output2:
enabled: false
format: llh
path: :2013
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: '1'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: false
glonass: true
gps: true
qzs: true
qzss: false
sbas: false
snr mask: '35'
update rate: '5'
[/details]SystemReport.zip (70.8 KB)

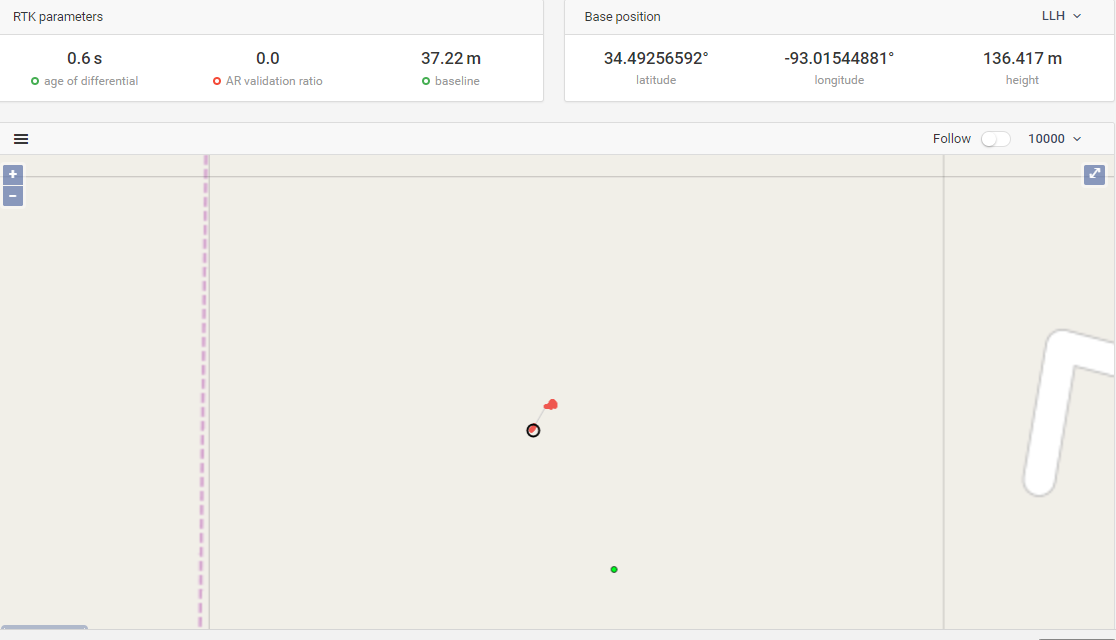
Bottom showing base and rover on map:
Hi Mike,
Could you try to send the corrections using RTCM3?
my older base doesn’t support RTCM3
Hi,
Seems like an old system and the only message i got was rtcm2 nr 18 and 19
A retired message system.
Also the VRS didnt let med get a refrence close enough, i got like 6453km baseline, no good.
Have you tried save logs and process them on the computer with RTKlib?
You might get lucky converting them into something usefull. Other then that it seems not usable unless the Reach supports older rtcm messages.
2 Likes