Hi, I have one rover and one base. I am planning to do a measurement that do not need any live correction.
I am only interested in the relative movement of the rover compared to the base station.
Is it possible to set this up in advance, so when I am on site, all I have to do is:
plug in power (rover/base not connected to any network and not connected to each other)
wait some minutes
unplug power
Then go back to my office and do all readings/corrections with RTK quality?
Yes.
But you will not be able to monitor or verfy that you have enough good data to do a accurat measure in post.
Edit: Unless you log in to reach hotspot and browser or via bluetooth.
When the actual measurement is being done, the unit is out of wifi/bluetooth range, so I will have to rely on that it actually works.
Do you know if the Rover should be in single or kinematic mode? (I need kinematic for the end result) I mean, the rover is not getting any inputs from the base while in action.
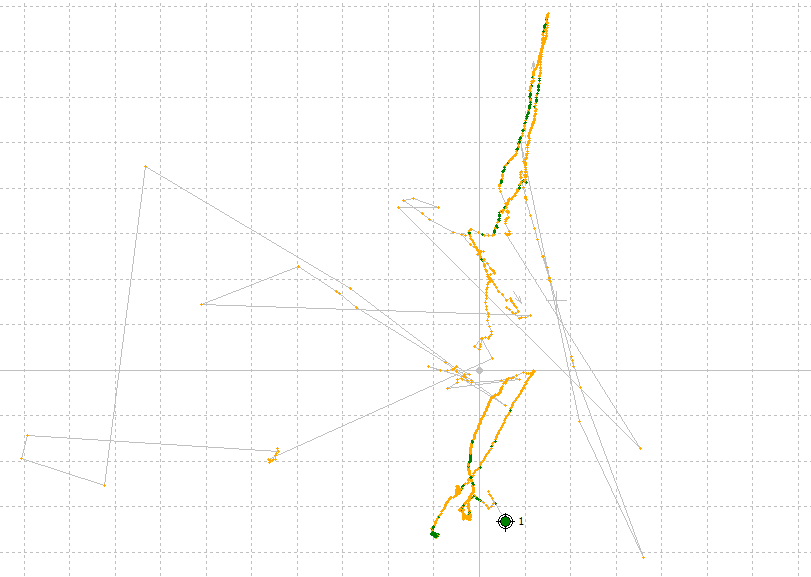
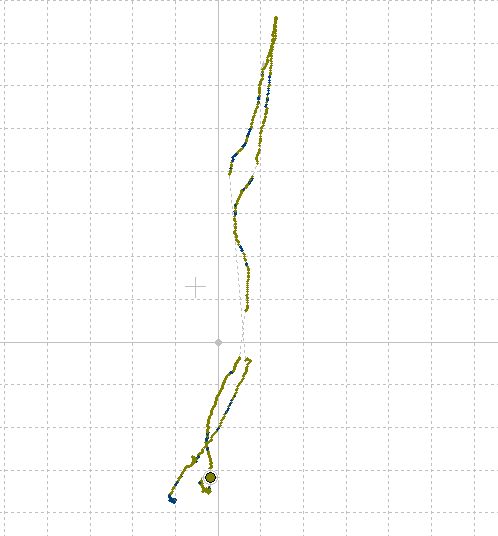
At first it seemed a bit overwhelming, but now it start to look really cool…
The “noise spikes” are in the middle of a walking sequence, any idea on how to remove them and leave a blank void?
(I am walking under a large steel crane during the spikes)