We are thinking to buy a new camera in order to perform photogrammetric surveys. We will generally trigger this camera through a pixhawk but we would like to be able to trig this camera with the reach itself.
We are looking for a relatively light camera (ca. 500 g max), with reasonable lens distortion and a hot shoe available.
What would be your advise? Has someone any experiences to share about this topic?
I have never seem something about a camera being shuttered by the reach, it seems it’s more common to have the camera triggered by the UAVs control software (or something internal in the camera, like CHDK) and then sending events to the Reach for syncing, using either the hotshoe or, if that is not possible, the red eye reduction flash, see Install a Canon Precision Geotag Cable.
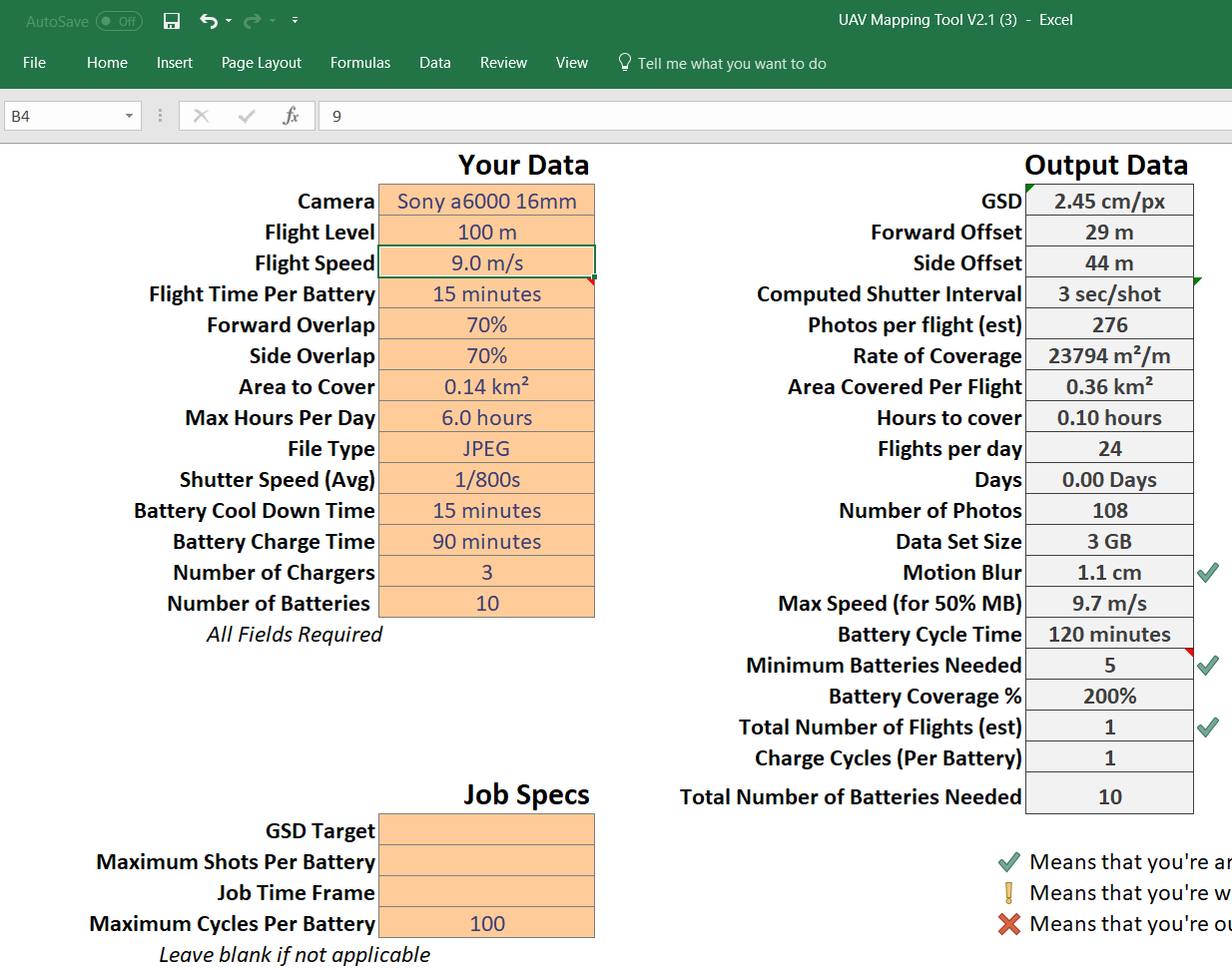
I know Sony Nex 5 and Sony A 6000 are popular because they are lightweight, have a large sensor, can be triggered externally via IR and then sync’ed with the Reach via the hot shoe.
We are actually thinking about buying the A6000 with a fixed 16mm focal length… But we are still a bit confused with the size and weight. A6000 is probably one of the best solution for uav mapping.
For you @tobi_kellner and other frm the reach community, what would be the best compact option (with hot shoe of course) ??
Hi there, I’m using a Samsung NX mini . Is 20,5 mgpx and I there is no distortion on the edge of the photo for the over laping . Is very ligth . the problem is samsung had discontinued this camera .
Thanks for your answer but the camera must correspond to the following criterion’s:
global/mechanical shutter
hot shoe
can be triggered by pixhawk (not fan of IR triggering)
I think that the NX mini is a rolling shutter and I am not sure that it could be triggered. We are probably going to choose the sony RX100 II or even a alpha 6000 with a 16mm fixed focal.
RX100 is a good choice for light drones. It has all what you request, is very light and price is OK. I use them for 3 years now, pictures are nice enough for close mapping (I fly around 100m with them).
If you can afford more weight and $$, then larger sensor (APS or full frame) will be great.
From a financial perspective, I guess it partially depends on whether you look at it as drone-only, or whether the camera also functions as your default camera when it’s not in the UAV.
I am currently planning to get a Tuffwing and I ordered a (used) Sony Nex-5N for it. My hope/expectation is that I can velcro it into the UAV whenever I fly, and have it as my normal camera the other 99% of the time. The only UAV-specific investment is the 16mm pancake lens, as this would not be a lens I’d normally buy.
Are you guys also using your camera outside the drone? Or are there important reasons for keeping a camera for exclusive in-UAV use?
This camera would probably be a drone-only camera as we already have good cameras which can not be used in our targeted solution (trig by pixhawk, hot shoe and time sync with reach): sony RX100-III (no hot shoe) and other Ricoh GRIV (triggering too complicated).
We are going to choose a sony A 6000 + 16 mm fixed focal (I think this is the pancake lens right?) but I a m still hesitating to buy something cheaper and lighter weight like compact.
Does someone has a compact camera solution which respects following conditions:
What application is this for? A multirotor or a fixed wing? Or?
I would still consider the Sony R10C and companion computer from Event38. Its about $1200 for the standard kit. Shutter via Pixhawk(telemetry2 hookup), and also integrates Emlid for image geotagging. You could fit onto a multirotor with a cheap 2-axis gimbal I bet. Or pay another $250’ish for a fixed wing mounting system if you’re going that route.
We use both fixed wing and multirotor. I know the kit from Event38 but I found it pretty expensive.
Beside it is designed for drone, I don’t see a real added value of sony R10C kit in terms of 3D surveys for example when comparing with sony RX100 ii with hot shoe. For 400$, you have similar images, precise geotagging with a cheap hotshoe cable.
How are you then editing the image exif data with the reach time stamp data?
Even an unmodified R10C can have a latency of 100-200ms which is not consistent so a basic offset cannot always be used. So even using the same Pixhawk activation signal to activate the camera shutter and applying that to the Reach for a time stamp, then while traveling around 5m/s could give an error of around 0.5meters. So modifying the R10C further can achieve 1-2cm accuracy.
@DaneGer21 Reach takes signal from flash hotshoe and record that time, ie the time where shutter is open. Not the time when Pix send a “take picture” signal (we have this in Pix log). So Flight speed and latency have nothing to do here.
I use RX100 II and do that way.