



How are the surveyors amongst you getting known point coordinate data to set up a base station for base and rover surveying?
My understanding is that to obtain some known coordinates you get gps data for the point you wish to set up on… but if you want to set up your gps base on it how does that work? Which have you done first?
If you say you’ve used a surveyor with total station kit to get known coordinates then surely he’s had to use a gps to locate his total station peg to set up the total station over to then get the coordinates.
That all sounds confusing i know but read it slowly ha ha.
I am from a surveying background but mainly using Leica total stations set up over a peg that i set an arbitrary datum of 1000, 1000, 100. I would then level from a local bench mark to get absolute OS ground level and then align the finished survey data with an OS published map tile. This will suffice for small area topos.
If setting up over an unknown point which we have to admit most of us will then have you set up your Reach as a base for a prolonged period to get accurate coordinates?
I hope all that makes sense…
Basically if known coordinates are generated by gps then why isn’t it enough to use your Reach RS+ unit to obtain those known coordinates?
You’re already aware of how it was done before GPS was available, namely a network of geodetic markers. With those known markers, you can use a theodolite/total station to work your way towards a point you want to measure precisely in the horizontal. Then you can use an automatic level to establish the height. The process is harder if your point is really remote, but it’s still doable.
With GNSS, we can now (mostly) forego this provided the observation conditions are good and all that’s needed is a long enough observation, followed by post-processing.
The problem with the RS+ is simply its absolute accuracy. If you have to comply to certain standards, then it’s simply not a good enough tool; you need a multi-band receiver to come down to the kind of accuracy that the classic theodolite/level method can deliver.
Hi Gabriel.
Thanks very much for your response.
Here in the UK, it was not a common occurrence, traversing from “known markers”. Surveys were often rotated in a CAD format to match Ordnance Survey data.
The Reach RS+ although single band will still give you the same accuracy as a Reach RS2 which is multiband, it just takes longer to acquire a more stable sat signal… that’s according to Emlid anyway.
Someone correct me if I’m wrong, but that’s only true if your RS+ is working as a RTK/RTN(i.e. NTRIP) rover with a known point base station correction and a decent baseline. For single receiver solutions post-processed through methods like OPUS or PPP, then single-band receivers are definitely not as accurate.
I think you’re far more experienced than me in gps data acquisition along with most of this community so i can’t argue but my initial query remains, why not obtain known coordinates with Reach RS+ even if over NTRIP?
The advice always seems to point towards setting your Reach over a known coordinated point with previously obtained coordinates but can’t this be done with coordinates obtained from your Reach when you arrive on site?
I appreciate your contribution Gabriel thank you 
In construction in the United States we are either setting up the base station on a monument and shooting in a local TBM or we are doing a localization that includes the monument. It depends on how close that known monument is to the construction site. Surveyors started using this practice about 5 years ago more as we’ve been doing it for over 15.
So the general feedback from this thread is people do not use the Reach RS units for gaining known coordinates?
Here’s a hypothetical scenario…
Here in the UK i could go to some rural farm land and want to do a survey on a couple of fields for future development.
There’s no known point available as i’m first onsite with this project.
I have a couple of Reach RS+ units without any NTRIP connection.
The area is open with no interference from trees, buildings etc.
Can i obtain coordinates with the Reach units without the need for any post processing, and place a station/peg/marker onsite from which all future works can be located to with accurate coordinates?
I still can’t get my head around this placing your Reach unit over a known point when surely the Reach units should be capable of giving you those coordinates or you’re going to have to own another more accurate L1/L2/L5 gps unit or have got somebody else to do it…but again how can they get the coordinates…they will just use a gps unit as well?!
Yes you can do that, but the stand alone accuracy of both units would be approximately 1-3 meters, maybe slightly better. Both units as a baseline, accuracy distance between them would be the same.
You can’t achieve centimeter accuracy without some kind of realtime link to another receiver or by post processing.
We have the best receivers (Javad) in the world, even stand alone the best accuracy you’ll get is 1-2 meters without post processing.
Thanks very much Bryan.
I have set two units up in my garden as a base and rover over a random point and done a small survey.
I compared the results against the same detail i had measured with a tape.
I had errors of between 3mm - 47mm which is good as there are a few trees on the boundary but generally i’m pleased with that.
Obviously i am under no illusion that that detail in relation to uk grid will be off by as you say 1 metre at least.
So, by using NTRIP along with both units will i get accurate enough data to be acceptable to industry and be able to create known coordinates?.. or will this again require further post processing.
I class my self as a hobbyist (i have a full time job non surveying related although i have worked as a surveyor for many years) as i love tech and assist my drone surveying friend on aerial surveys and am looking at providing a service to him setting out gcps and doing small topos in my spare time. I am trying to get as much as a streamlined process as possible with the Reach RS+ units that’s worthwhile for my time or i may have to admit defeat and face the fact that i need to stump up a few thousand in a more advanced gps system.
Michael, based on your notes, you’d probably be best selling the RS+ units and buy an RS2. Dual frequency units are superior to single frequency. You can then subscribe to a local RTN service and have cm accuracy. The Emlid receivers are great in open sky conditions, but do not like multi-path areas.
If you’re getting into this survey thing with your friend, you need to really hunker down and understand the process of GNSS use, proper collection and PP techniques. If not, you’ll be fumbling and not learning anything.
If I was a UAV user providing a product, I’d be awful leary of GCP data from a novice.
Bryan.
I have been surveying for around 20 years and locating data to OS for a majority of that time.
I am merely trying to get a full understanding of the Emlid Reach RS+ system capabilities alone.
All data released when i bought it suggested the cm accuracy straight from the box and that was around two years ago and it always gets put back in the cupboard due to lack of uk support at the time.
Emlid recently admitted it could not accurately output to UK coords without further conversion and this led to huge 20m errors.
It’s only now with their ReachView3 Beta app that it has the ability to output into uk coordinates with no further coord conversion needed and inputting this data into Qgis confirmed this.
I fully understand the techniques and could go out and buy a GS18 and crack on, my point is trying to understand the Emlid Reach RS+ capabilities or lack of it appears.
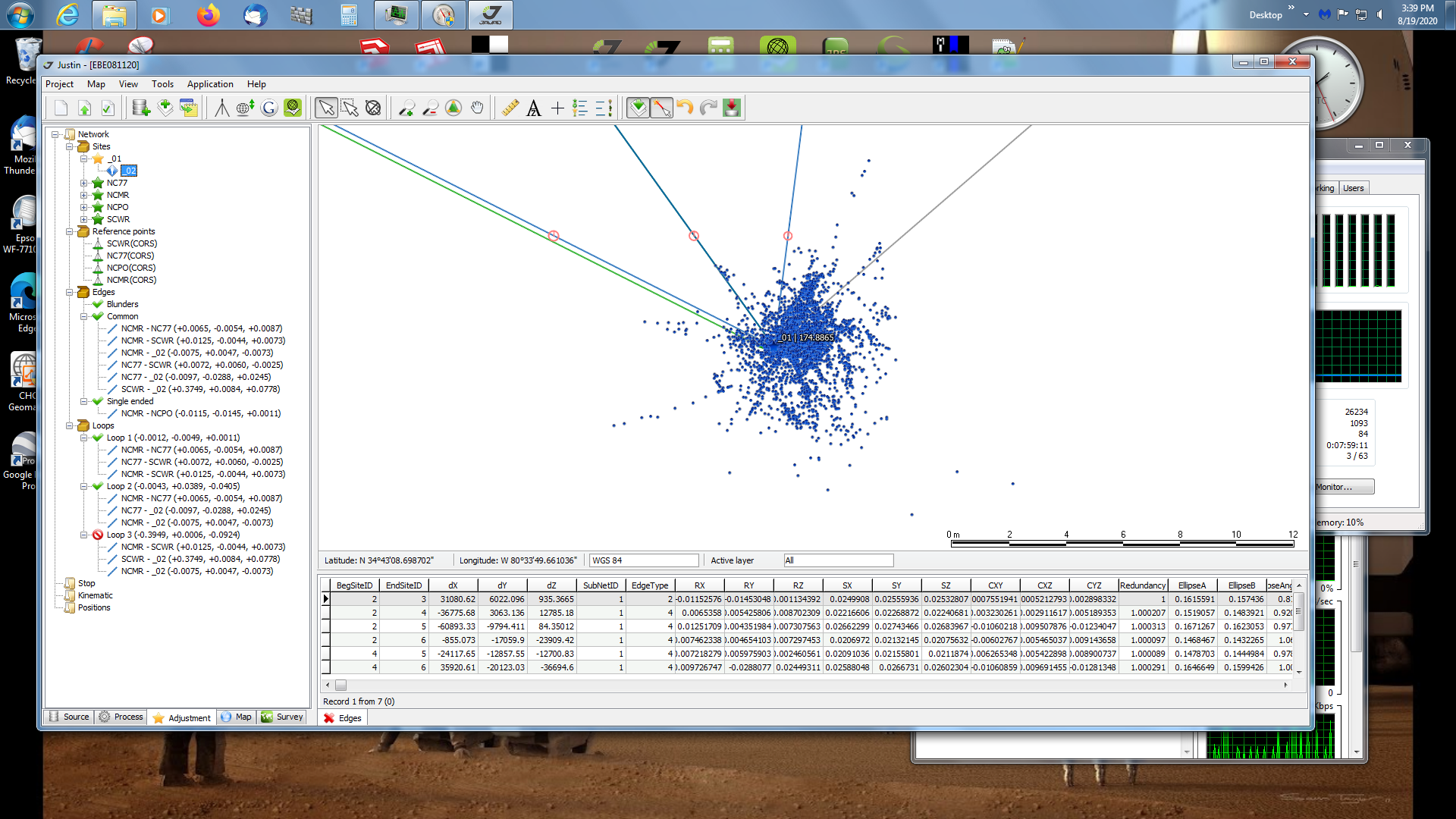
Michael, here’s a screen shot of an M2 collecting data as static on a known NGS control station. This shows the scatter of all the positions (approx 7500 1 sec epochs) of the M2 as it was collecting raw data (no RTN or RTK). Notice the scale at the bottom of the screen using JAVAD Justin PP software. As you can see, the computed positions of the M2 are all over the place. This was before any PP while loading the data.
In remote areas I’m either setting my base on a known point or placing my base in a location where I can locate it using ntrip ie within mobile phone coverage.
That works for me in Australia because of the Auscors network.
The big if is that I always verify my base station by correlating results with 3 or 4 other points known points I visit with the Rover.
As long as baselines are kept short this works and will give me a method to capture points in mobile phone deadspots.
For simplicity I prefer just to use Ntrip but the baselines and terrain normally mean I have to use a combination of ppk from my base and Ntrip based results.
We image at 4-8cm resolution so 2-3cm accuracy is adequate for my purposes.
Errors of greater than this are usually revealed by agisoft processing and as long as redundant points have been collected the more inaccurate GCPs are discarded.
Hope that helps.
I think this is the fundamental problem. The RS+ is totally not in the same category. A GS18 is in the same class as an RS2, but the RS+ is in its own (minor) league.
But even with a GS18, if you wanted good results, you’d need either post-processing of a lengthy observation or a reference station, to use as a base. Just whipping it out in the field as a single solution receiver would not be acceptable (IMO).
So there’s something that bothers me with how you expect overall GNSS to behave, or I don’t understand the precision you require.
I think much of this goes back to the question of are we looking for absolute global accuracy or site relative accuracy. For our purposes much of the time I am looking for site relative accuracy where the actual positioning of this base does not have to be absolute because of the data that we are tieing our drone maps to. This design data is rarely a native transformation from WGS84 to our State Plane EPSG regardless.
The point is that we just need to return to the same place with the same coords manually entered and the rest of the observations are relative. Another type of site relative accuracy is when we occupy a locally certified benchmark that may or may not have been derived from whatever is considered the “official” globally accurate control. As a matter of fact we quite often have “official” control that does not match each other. This is an odd scenario in our area.
The problem that we have with Reachview, not the hardware, is that even when we convert the ellipsoidal elevations to orthometric they still do not represent ground. The only method I have found is a 3rd party software which allows for localization.
I’m curious if I’ve misunderstood something about using these multi-band receivers.
Like chascoadmin, most of the time we only care about relative accuracy. So we’ve been letting our RS2 sit over a “known” point we create ourselves. We let the RS2 sit for a while as a base station, and then whenever we re-enter the site we place the RS2 on that point and enter the coordinates manually.
To my understanding, relative within our site we would have centimeter accuracy. That is, we have relative accuracy but not absolute accuracy. In these cases we do not care where the site is relative to the world we only care where points are relative to each other within the site.
Have we misunderstood and not had this level of accuracy?
You are correct. Allot of this stems from survey terminology and also the fact that some are probably doing metes and bounds surveys or are wanting to match an NTRIP solution in which they need to be globally accurate. We don’t have to worry about that with a base and rover unless it is some official survey for documents. Or at least globally accurate according to that system, lol. The majority of surveying that I have experienced (topographic, land title and engineering) have all been site-based so it took me a while to understand half of what many of these people are doing. The kicker is that many are using mathematical verticals that don’t even match terrain so I don’t think I will ever fully understand what good that info is.
I’ve asked a similar question previously and the answers vary on who answers or how they’ve read my question.
I’ve carried a test survey with Reach RS+ base and rover in my garden no corrections via NTRIP and set up over an unknown point and compared it to measuring the same detail with a tape measure.
I got a variant of between 3mm - 47mm (in horizontal) when comparing them both. I do have some trees around so that top end error would come down in an open area.
But as you say this is relative to itself and not absolute world coords.
From all the feedback I’ve had it seems the Reach RS+ units are not accurate enough to be able to generate a “known” point which could be used to set out boundary paperwork or any legally detrimental results…
I’m sure that someone will now tell me that’s untrue… 
I think you’re right and any receiver in a single solution average is not accurate enough for that type of work unless it is logged and PPK’d using a reference station.
The receivers are very accurate if used correctly. There’s not a receiver made that I know of that you can simply setup and expect realtime cm accuracy. You either need to use a radio RTK, RTN or PP the raw data for the receivers to have cm accuracy relative to one another.
If there was such a receiver, it would change the whole GNSS industry and also make my job a whole lot easier.