



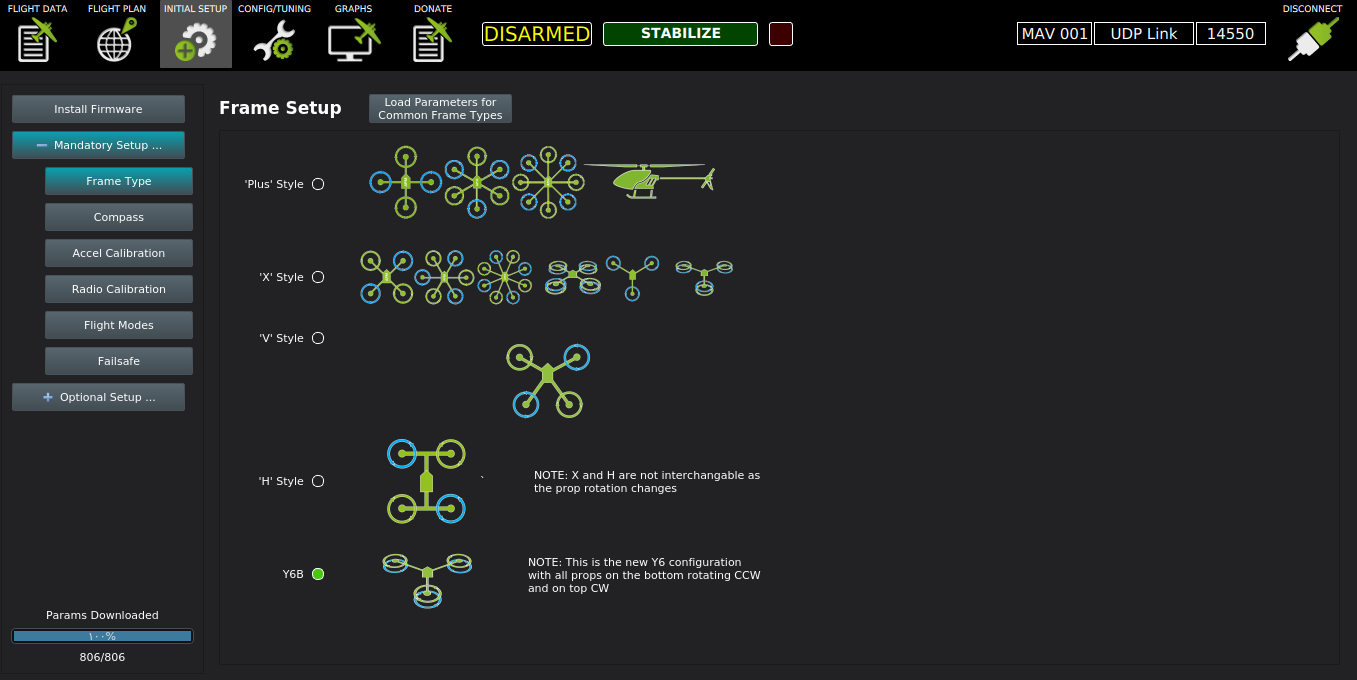
hi , i am using apm planner2 , it is giving me a continuous message to check firmware or frame class , they won’t allow me to mark the quad frame in the section of frame type or any other frame class except the Y6B one , i think apm planner should auto recognize my frame class since i already specified it in “sudo emlidtool ardupilot” command .
This issue also prevents me from arming the copter , any help .
Note : when i manually changed the frame class parameter in the full parameters list from 0 to 1 , the “check firmware or frame class” message disappeared and i was able to arm the copter , but i am afraid it is not the correct method nor the correct frame class parameter
Any help
Try using Qgroundcontroll or Mission PLanner
Hi Moe,
I will check if the same issue repeats for our Raspberry. I’ll let you know when I get the results. In the meantime, could you try connecting your vehicle to another GCS and see if the situation’s the same with them, please?
Hi Moe,
Frame class and frame type are set up in GCS manually. EmlidTool GUI does not allow to set these parameters. Thus GCS can autodetect only if it is copter or a plane.
Could you try different GCS (Mission Planner or QGroundControl) and see if this issue persists?
Hi mikhail , i tried QGroundControl and it worked , the problem is with apmplanner2 .But changing the frame class parameter manually in the full parameters list in apm planner2 also solved the problem . I used the below list found in the documentation 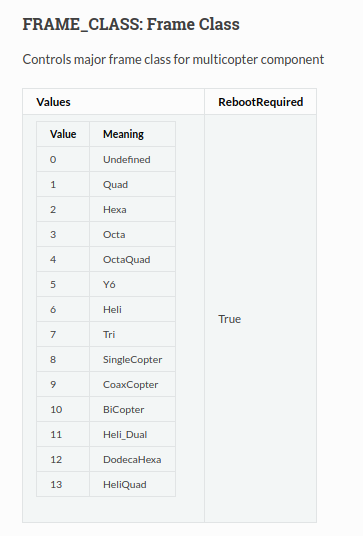
1 Like