During these
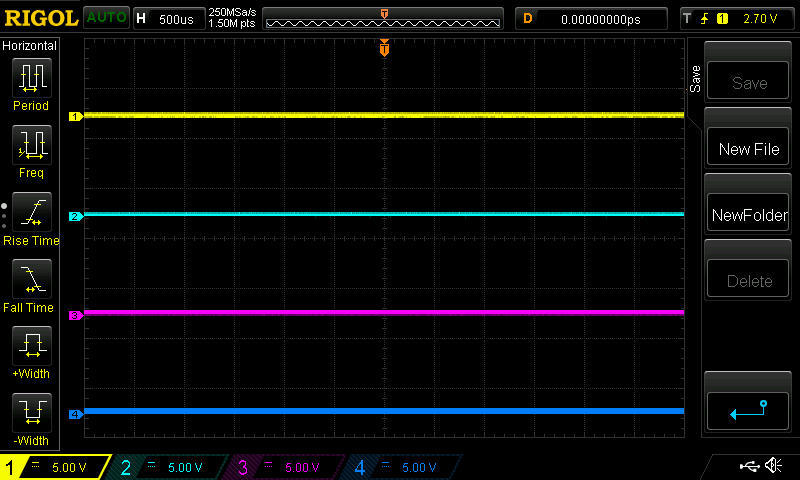
days I observed that PWM signals received for ESC are different from the signal applied to PPM navio input. To be more precisely Ch1out value´s is always 150ms above the other signals applied to the others ESC(2-4).
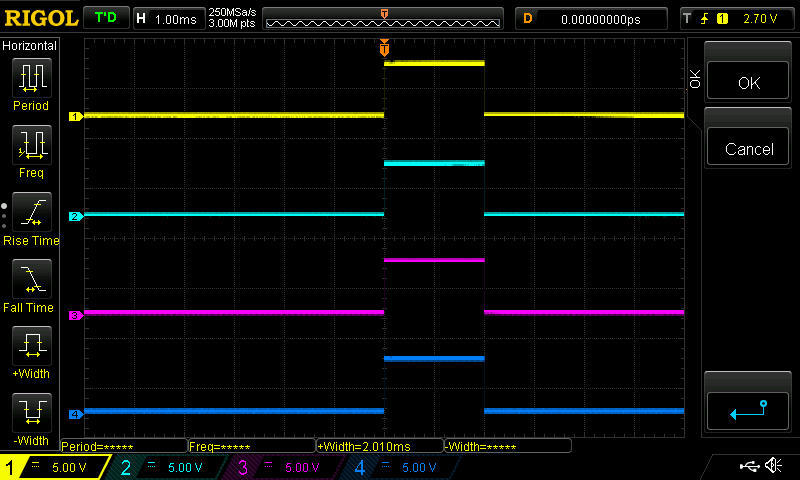
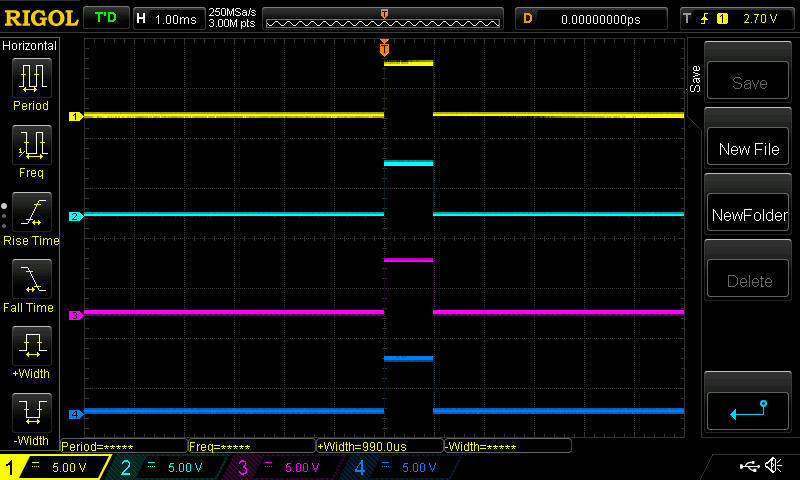
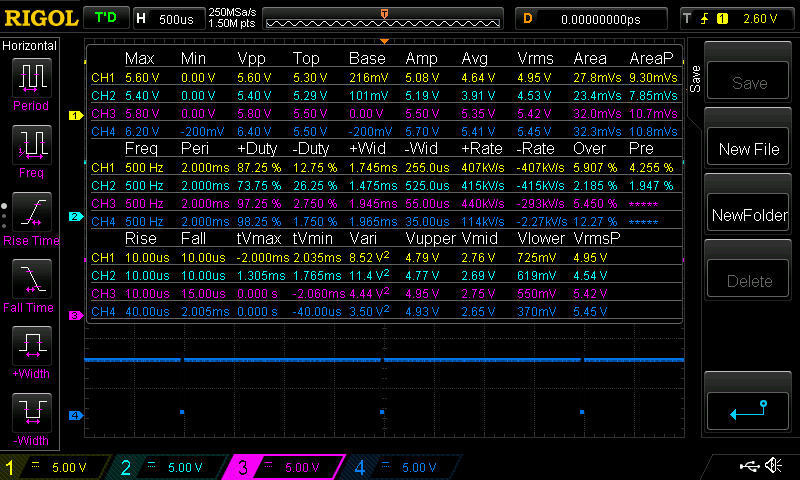
I used one scope to check the signals and I am realize that during the ESC calibration the
maximum (2010ms) and minimum (990us) values are send them to the ESC like you can check on these following pics.
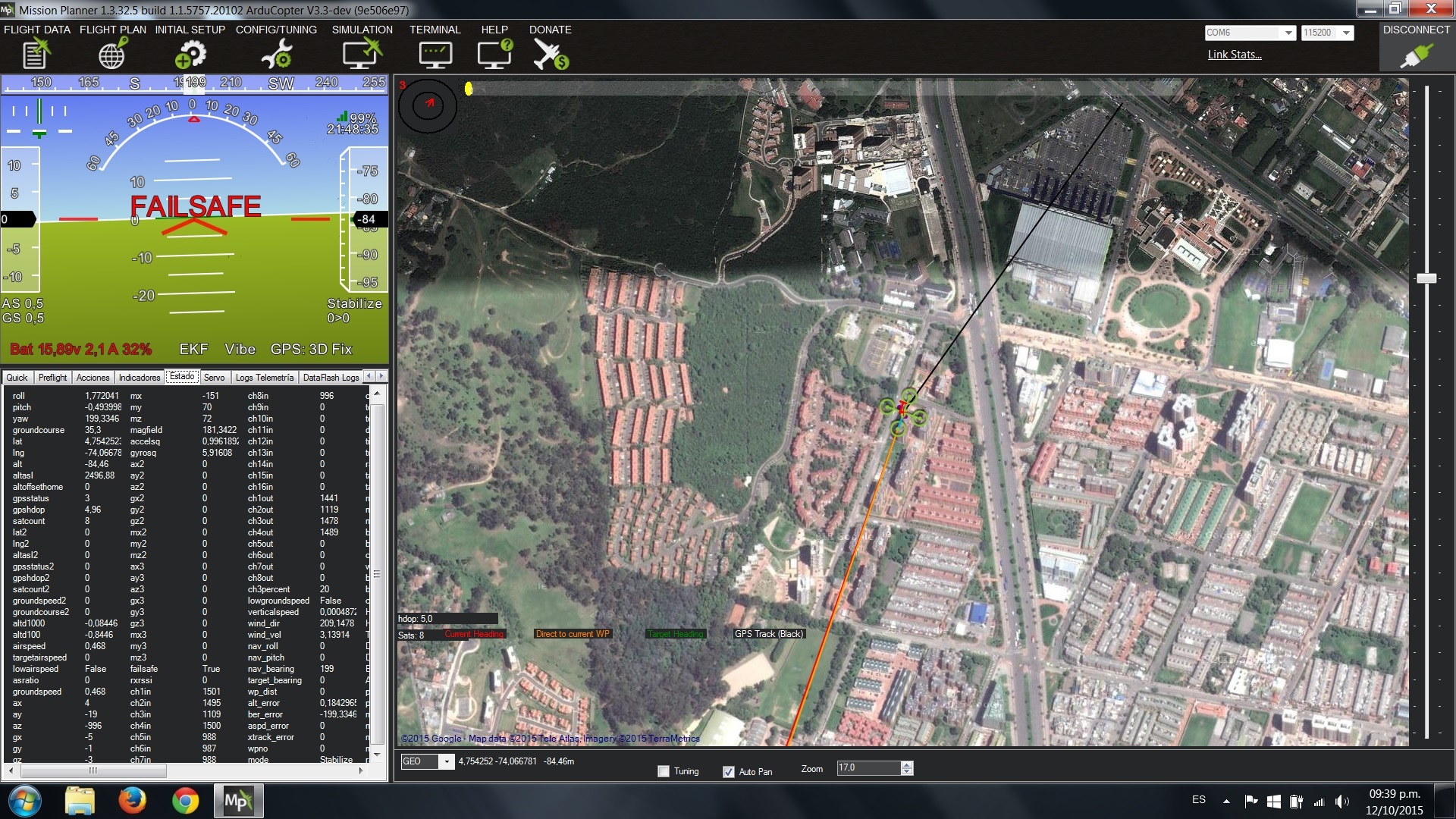
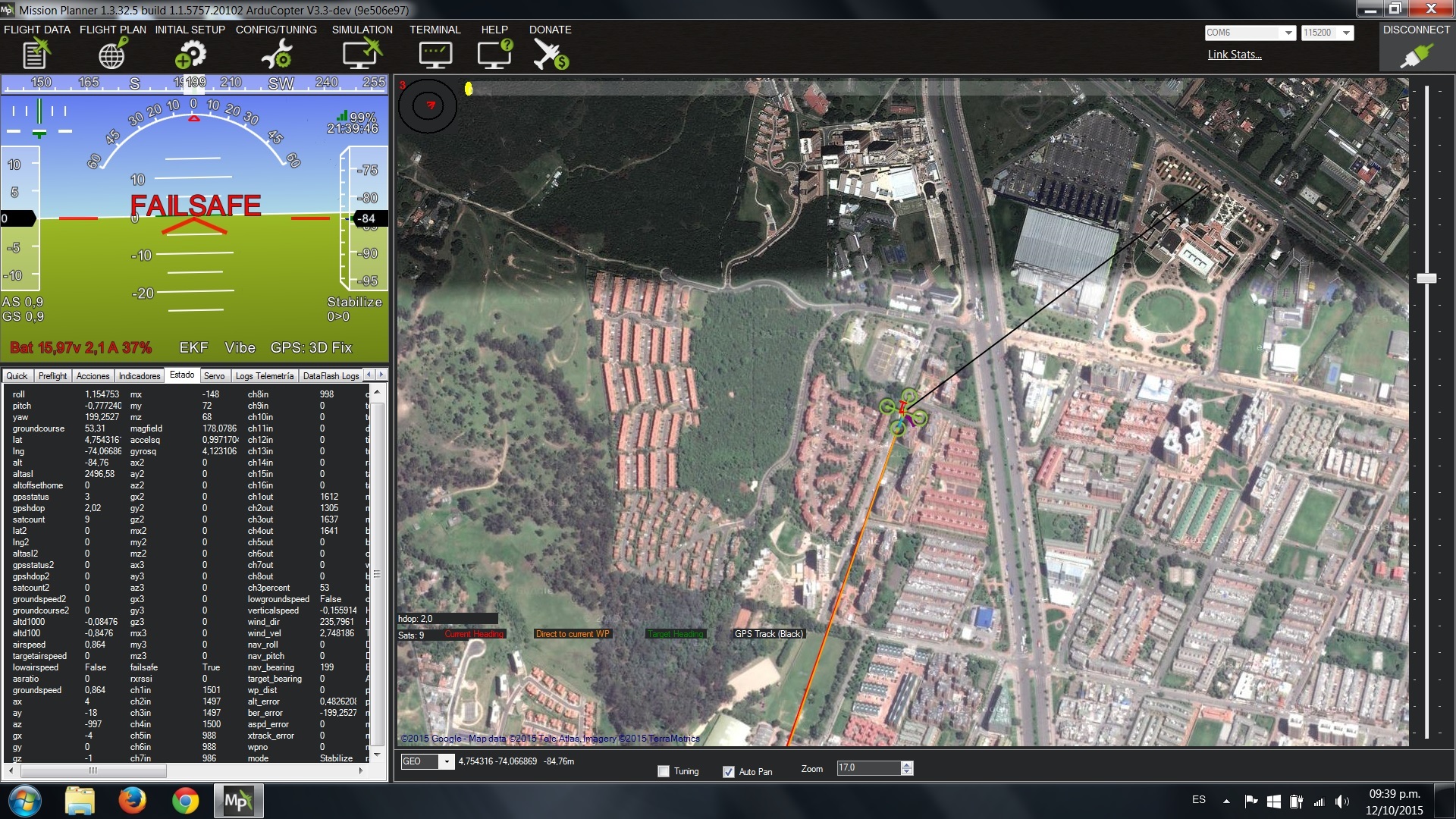
Then with Mission Planner open, I check the Incoming and Outgoing Values at the same time those values were checked with the Scope are not the same. At this point either
25us or 35us could be acceptable but the difference on values during the test are bigger.
For example with throttle at 20% ch3in value is 1109 and for the ch1 to ch4 out the values
were 1441ms - 1119ms – 1478ms – 1489ms (it means 339us above the original channel 3 input). (See some screenshots)
It means during all the movement of the throttle stick the difference is present.
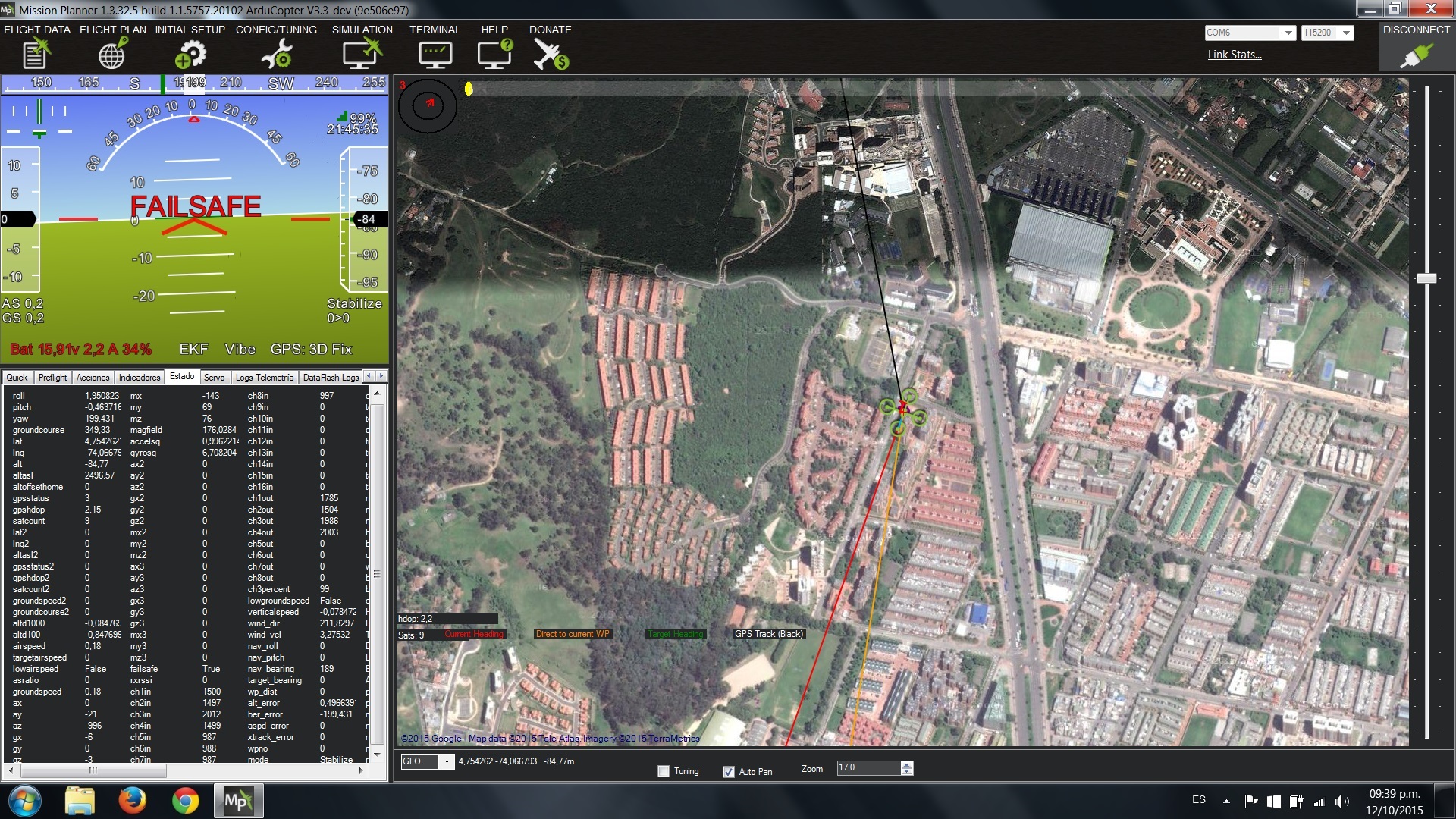
Additional to that when I move the stick in YAW direction the highest value 2003ms is
interchanged between ch1out and ch4out
Today I went to fly to check my previous findings and after several crashes I decide to stop and request help to you because it has been impossible to perform either manual or auto trim calibration for my quad.
My questions are:
Why there is highest difference between ch3in and ch1-ch4outputs?
Is there any parameter that can be modified to get a good response from the system?
My Quad configuration
4x Multistar 3508-640kv V2
ESC 30AMP (SimonK firmware)
Props 13-5.5
Alien 560 with Tarot extensions
Batt 4S 6600mAh
Total Weight 2.8 kgr
FrSky SBUS to PPM
TX: Taranis plus RX: X8R
3DR Radios
Navio Stock Linux Kernel
Thanks in advance for your help, indications and answers.
I am not sure if I understood your issue correctly. It is not required that input matches to output as there is plenty of math going on in the code that constantly stabilizes the vehicle. Also after you arm the copter, value thr_min + mot_spin_armed will be written to the outputs, not your stick position.
Got to ask a basic question first… I presume you completed both the APM RC calibration AND all-at-once ESC calibration?
It’s not going to be a problem with Navio APM HAL (software) else we’d all see inconsistent motor response. The hardware, a PCA9685 chip, is unlikely to fail with a delay on one channel as it only has one external clock input from Navio which would be unlikely to differ always on just one channel (? I guess all would slew when longer than max CPPM frame length).
Also run the RC Input/Servo sample (see development section of docs) to test a more direct relation of input and output if full calibration does not help/to rule out any hardware fault.
And to prevent crashes double-check all ESCs are the same firmware, not forgetting to re-run ESC calibration after each change or APM parameter reset (that got me once already, now I do it after every upgrade to be safe).
Thanks for your soon answers… Yes there is a lot of Mathemathics involved here but considering that test were done on a leveled surface (HUD was also) and Stick for pitch and roll was not touched and the differences were evident my concern continue. On the other side APM RC calibration has been done with every change related to APM parameters and when the firmware on the ESC has been updated also. (Simonk and BLHeli has been used as well.).
Now it is a good opportunity due Emlid´s team today has announced the release of version 3.3 APMCopter then I will try
I assume that I have to configure everything since begining "Fresh Part " so I will do it and I let you know the futher outcomes.







 I decide to stop and request help to you because it has been impossible to perform either manual or auto trim calibration for my quad.
I decide to stop and request help to you because it has been impossible to perform either manual or auto trim calibration for my quad.
 " so I will do it and I let you know the futher outcomes.
" so I will do it and I let you know the futher outcomes.