



Originally published at: https://emlid.com/carlson-survce-now-supports-reach-rs/
We have great news for Carlson SurvCE and SurvPC users! From the SurvCE version 5.06 Emlid Reach RS is fully supported making connection workflow even easier!
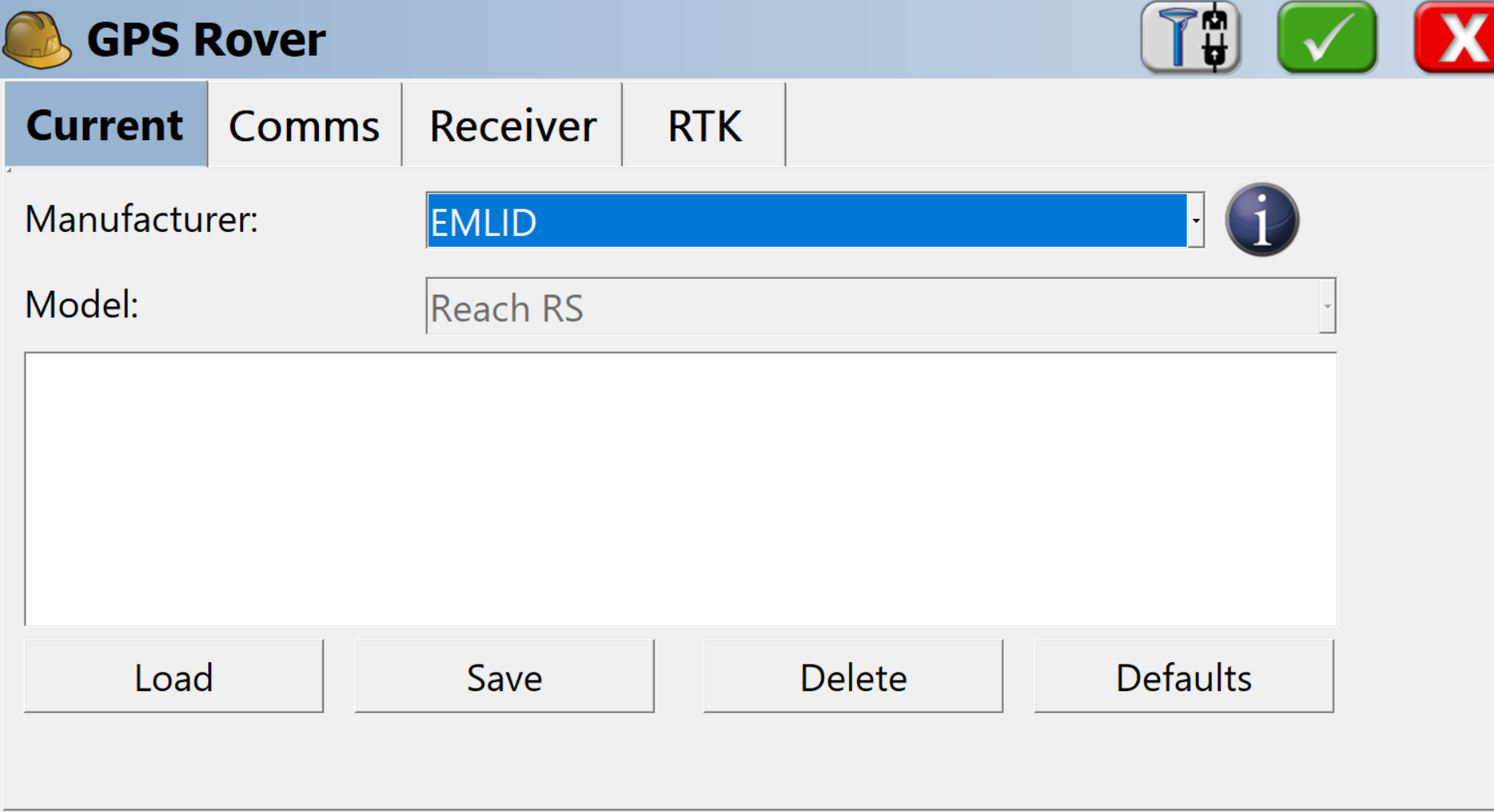
To start collecting data with Reach RS rover using SurvCE launch the software, go to “GPS Rover” and select EMLID as Manufacturer.
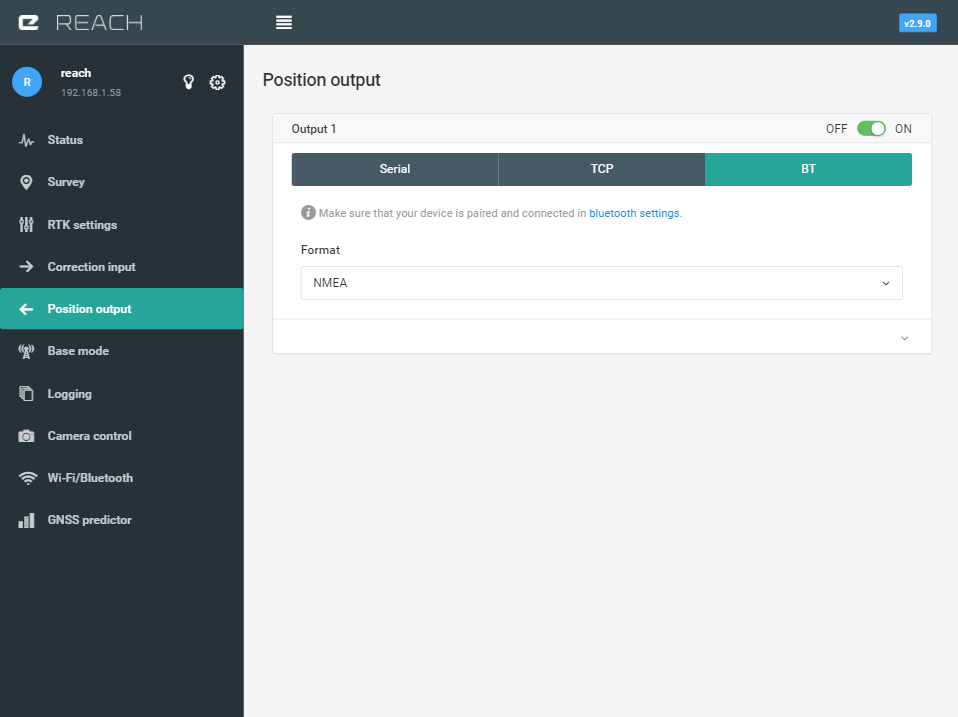
In ReachView running on your Reach RS rover select position output via Bluetooth in NMEA format.
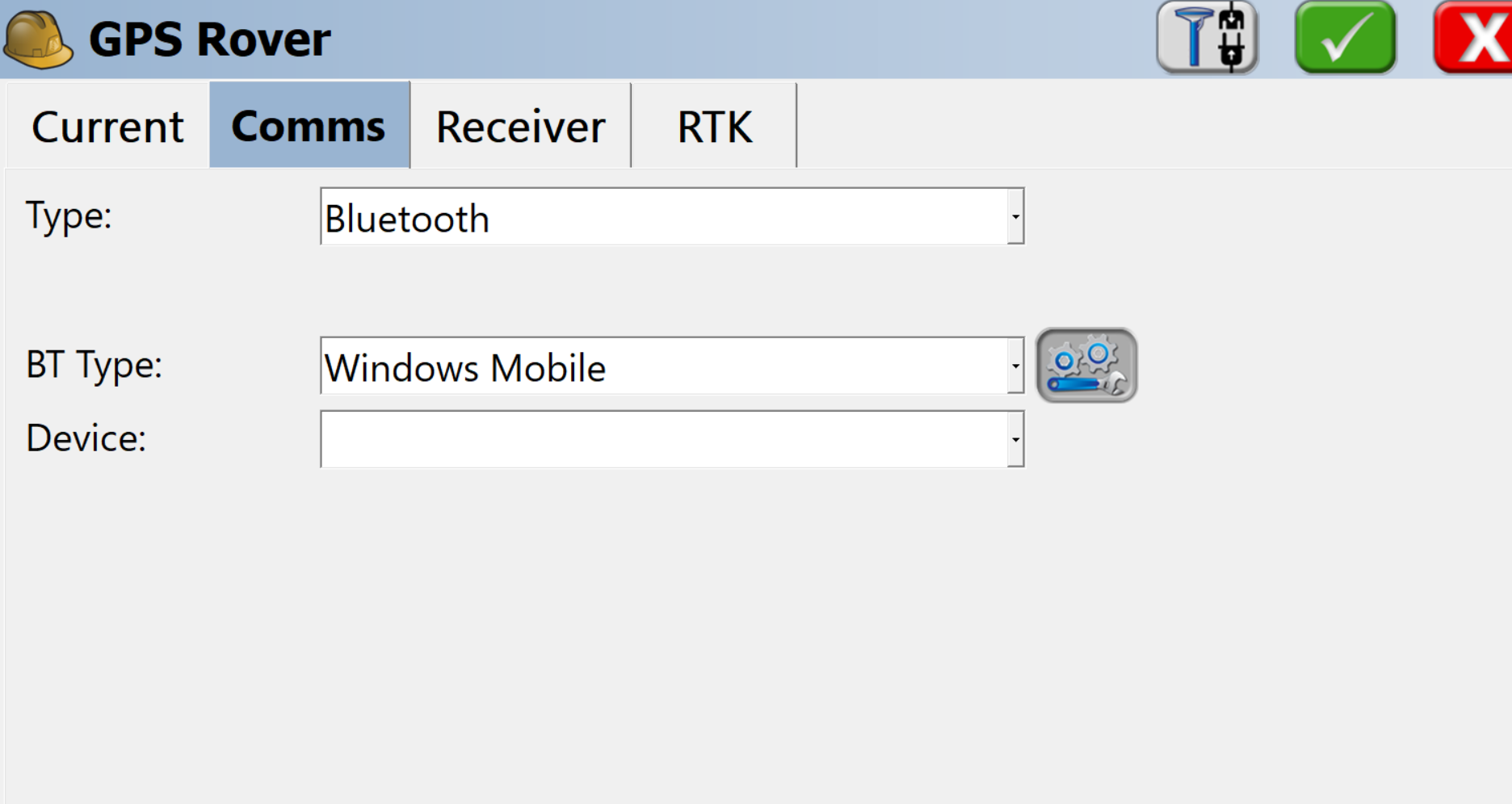
Then pair the data collector running SurvCE with your Reach RS receiver via Bluetooth.
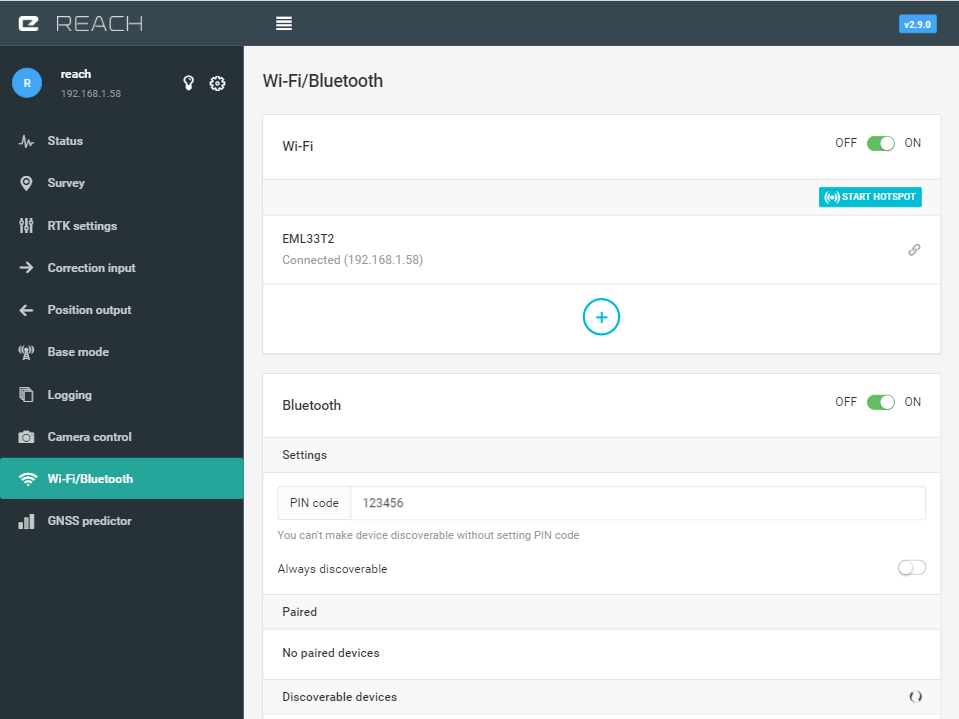
Remember to enable Bluetooth in ReachView running on Reach RS.
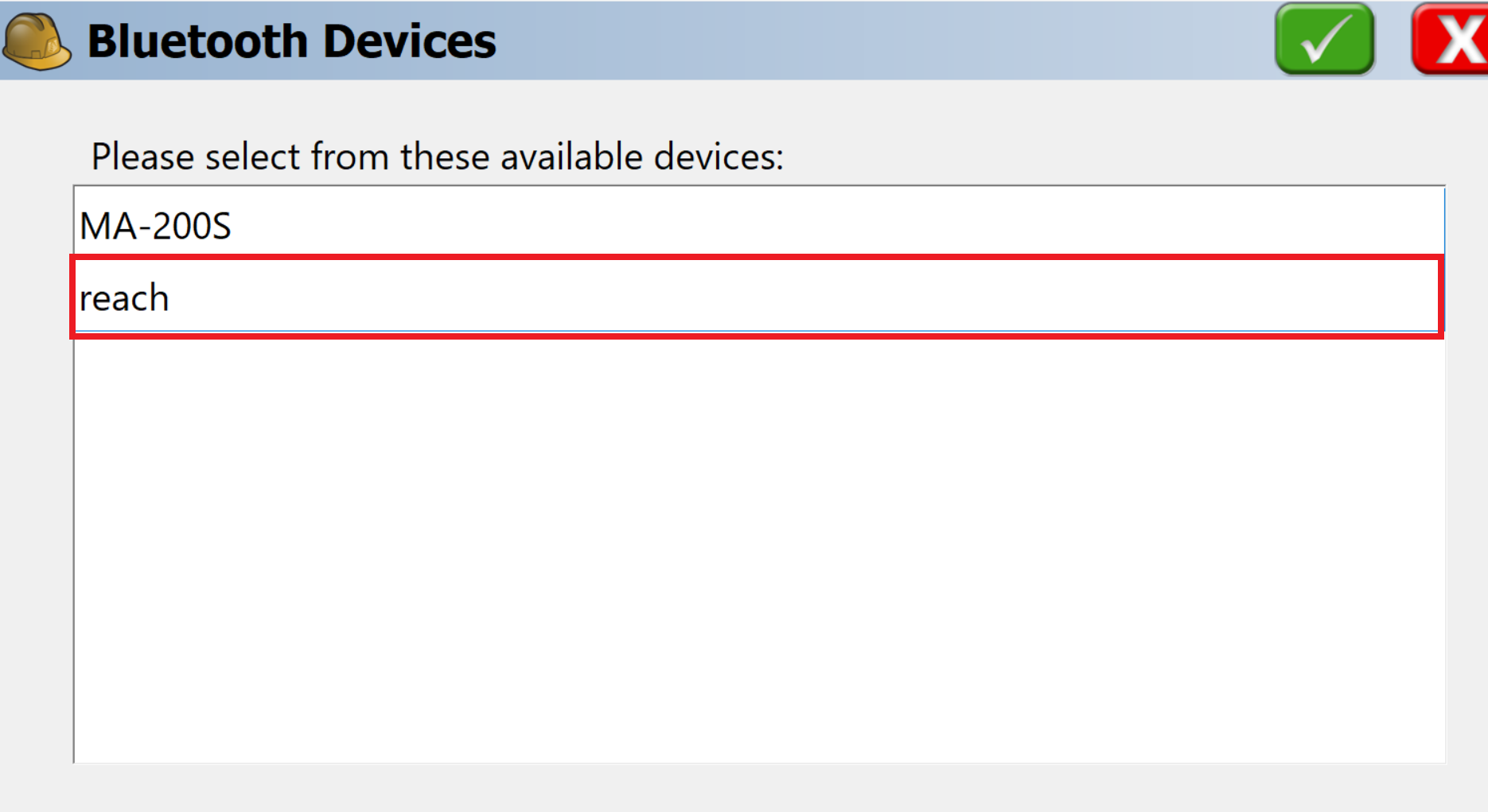
Select the receiver from the available devices list in SurvCE.
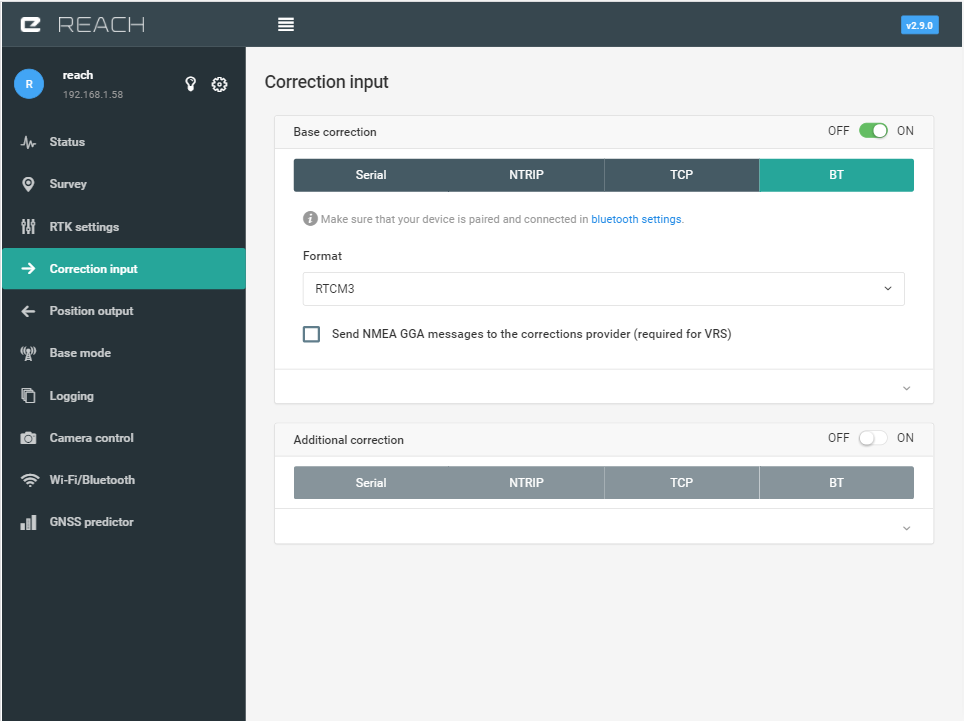
If you are getting RTCM3 corrections from SurvCE select Bluetooth correction input.
That’s it, you are ready to go!
Carlson SurvCE is a complete data collection system for Real Time (RTK) GPS and Total Stations with in-field coordinate geometry. Carlson SurvCE is the data collection software, combining advanced functionality and ease-of-use.
If you are facing issues when pairing SurvCE / SurvPC and Reach RS, please report on our community forum!