



Hi all,
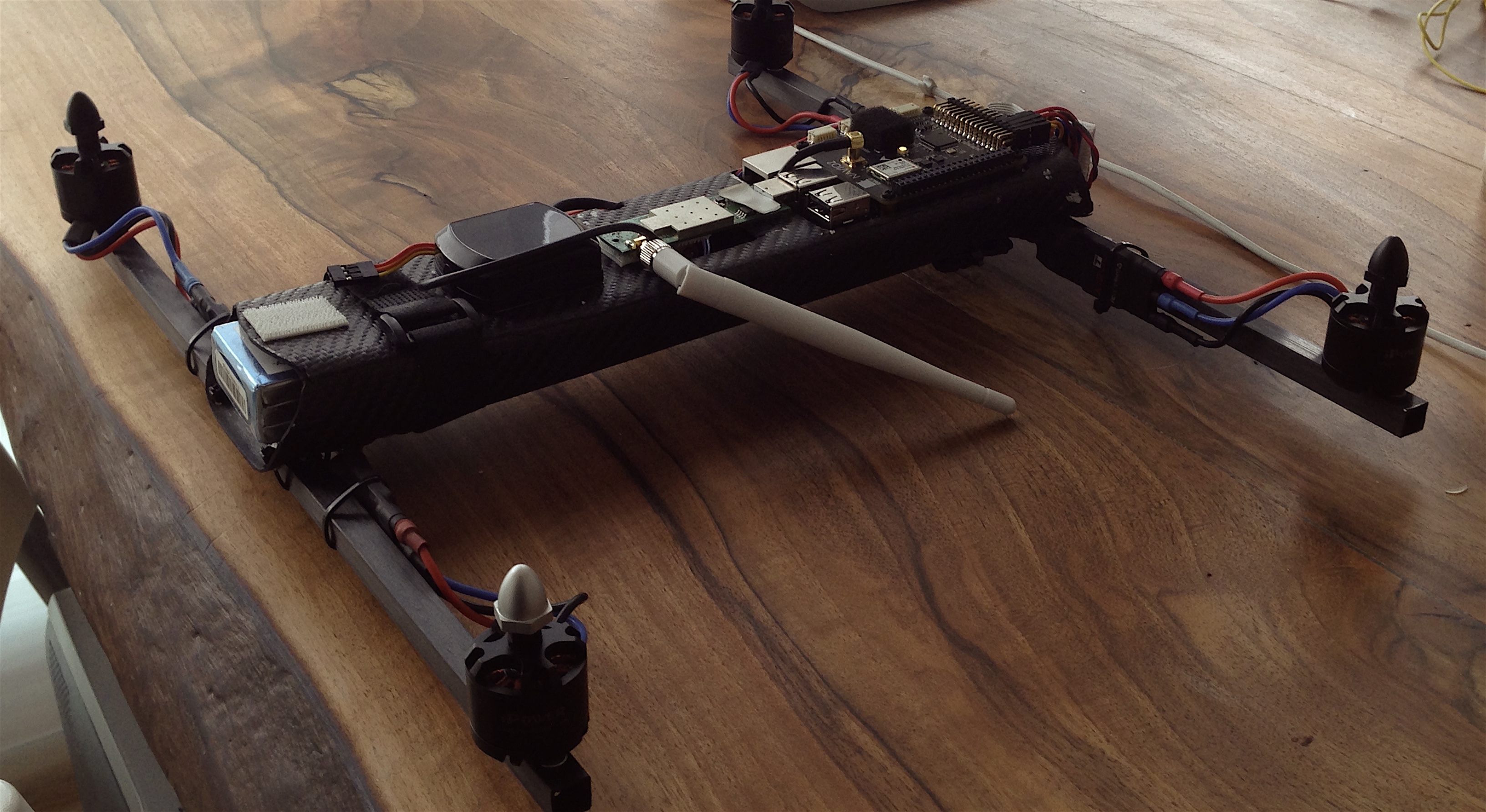
I’d like to share a H-quadcopter project I did some time ago, based on a tubular carbon frame and a NAVIO2 controller on a Raspberry Pi 2.
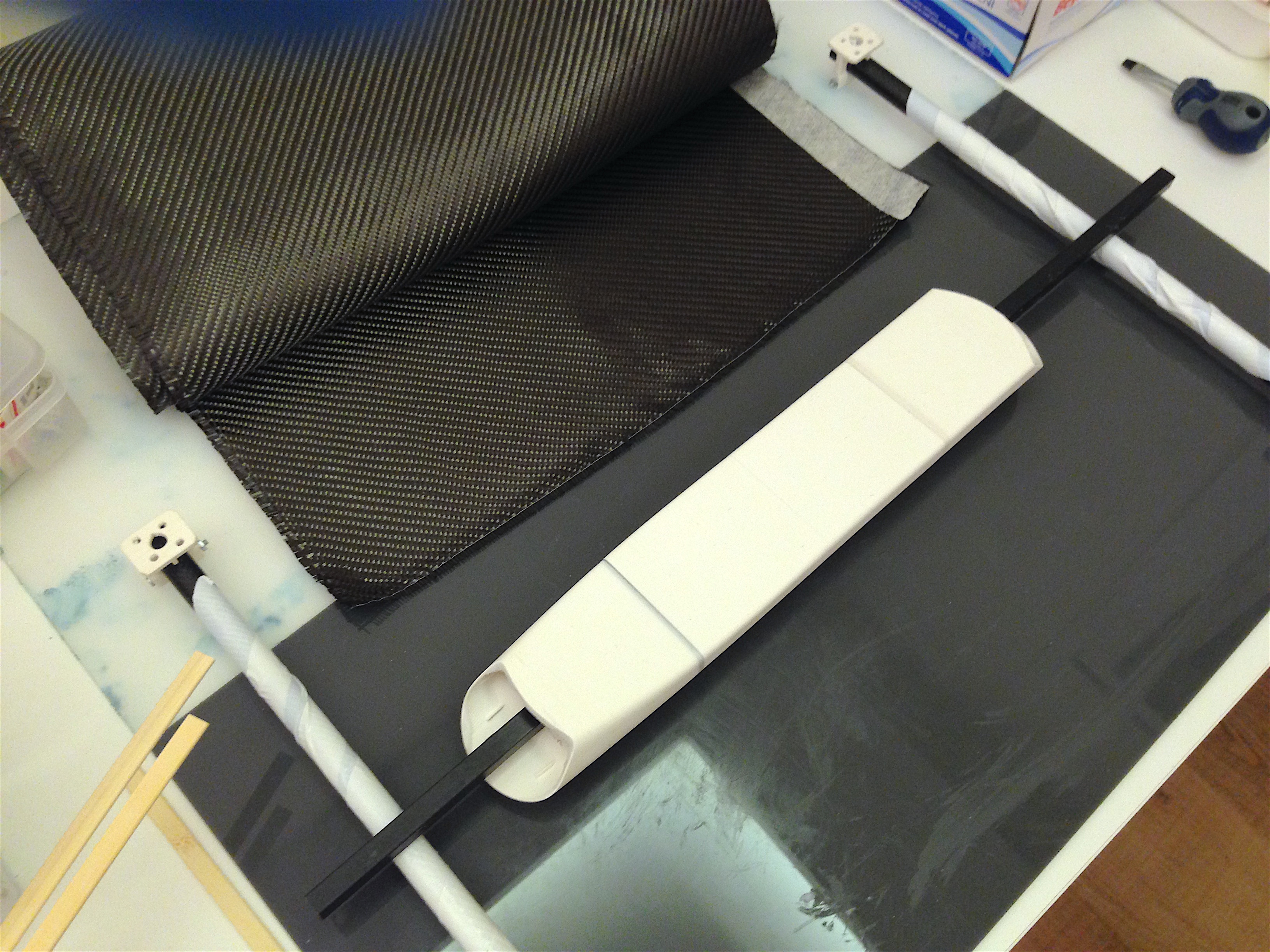
The main body of the quadcopter is made out of four layers of 3k carbon fiber rolled around a 3d-printed mold. The mold is destroyed during release.

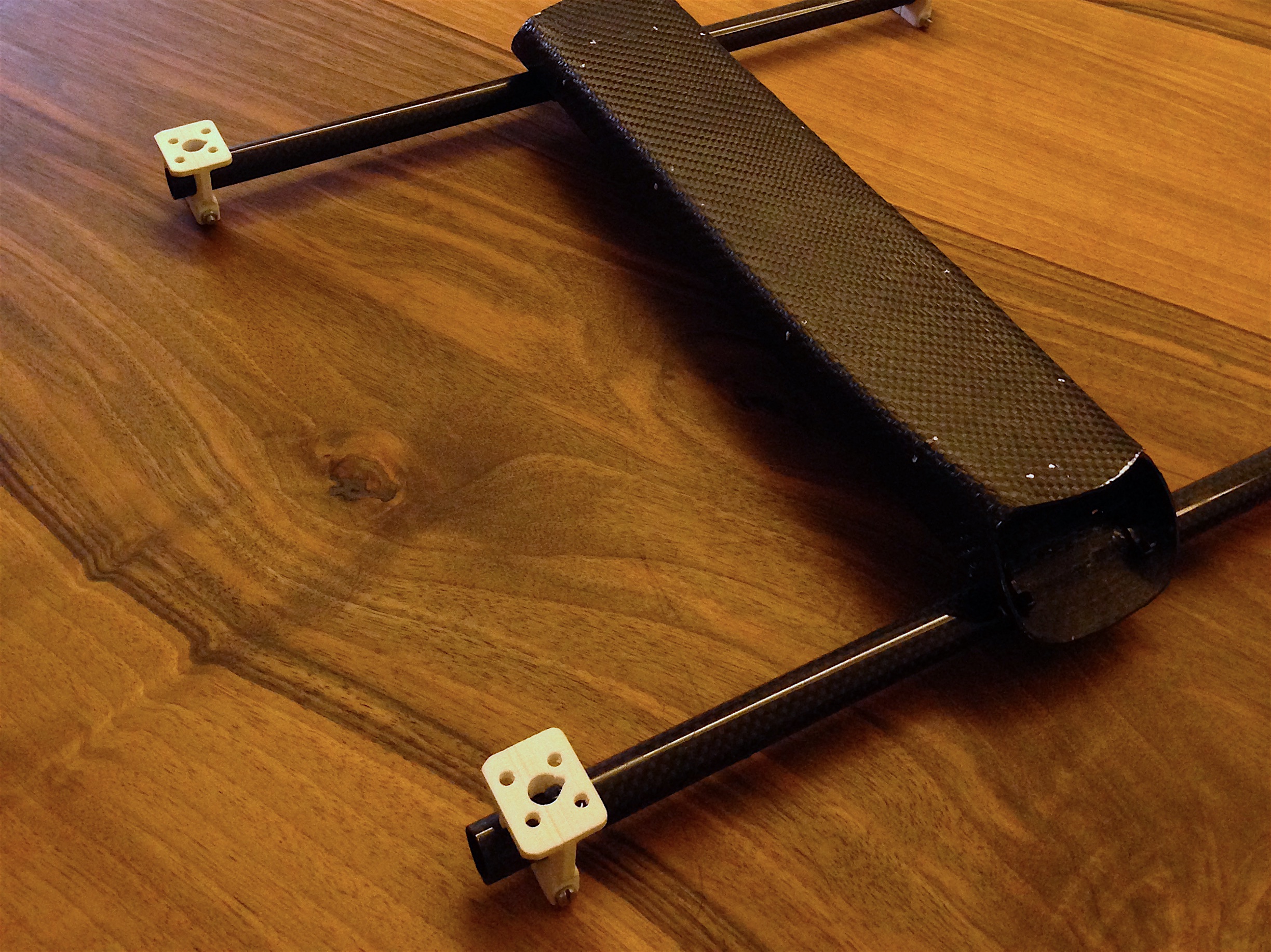
The motor arms are regular 3k tubes, and the motor mounts are also 3d-printed PLA.

The weight of the copter with a 3300mah 3S battery is around 880grams, which gives it around 19min of flight time, according to ecalc. Better quality motors and props could push that figure further down, as well as getting rid of some of the excess hardware (e.g. shorten cables, remove Pi ports etc).
Finalized frame prior to hardware fitting:

I’ve only tested it in two flights; the first of which is just a GPS loiter test. Video is below:

For those interested, I’ve written an extensive post about this build and also previous failed ones in my blog.
Thanks to EMLID for producing great hardware, and to the community for sharing their experiences!
