However the GPS.py does not appear to get a fix with the onboard antenna after hours of trying. It is on a window sil where I have has many GPS locks from separate Ublox CAM-M8C hardware - or my mobile phone for that matter!, but not the Navio2 Ublox NEO-M8N. For me an external antenna is not an option as it has to fit in a cramped water tight ROV enclosure.
Sure it might work if I take it to an empty field (or sea in my case), but I was expecting the GPS fix to be obtained easier than that…I don’t want to have to take it to sea to work on my application using the GPS
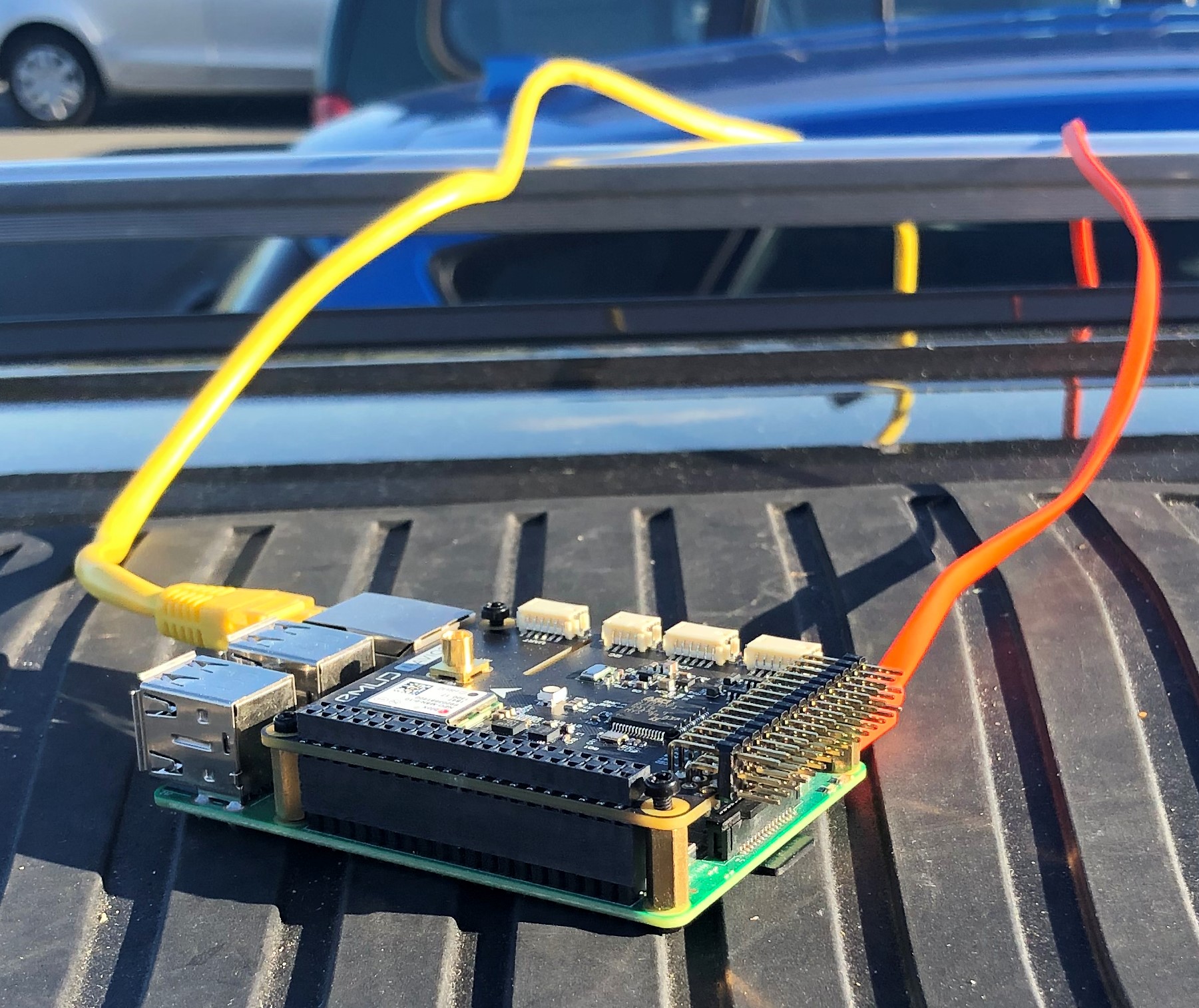
The setup was very vanilla with the power coming from the USB on the Raspberry PI and the Ethernet connection hardwired to a WiFi router in the car for connection to my mobile phone.
Unfortunately for my application (underwater sub) it’s too bulky and my experience suggests it should not be required. I am trying to map the sub on the surface, in terms of where it dives and surfaces.
I have previously used an OzzMaker GPS/IMU card which worked great. I bought Navio2 for the integrated sensors plus PWM control.
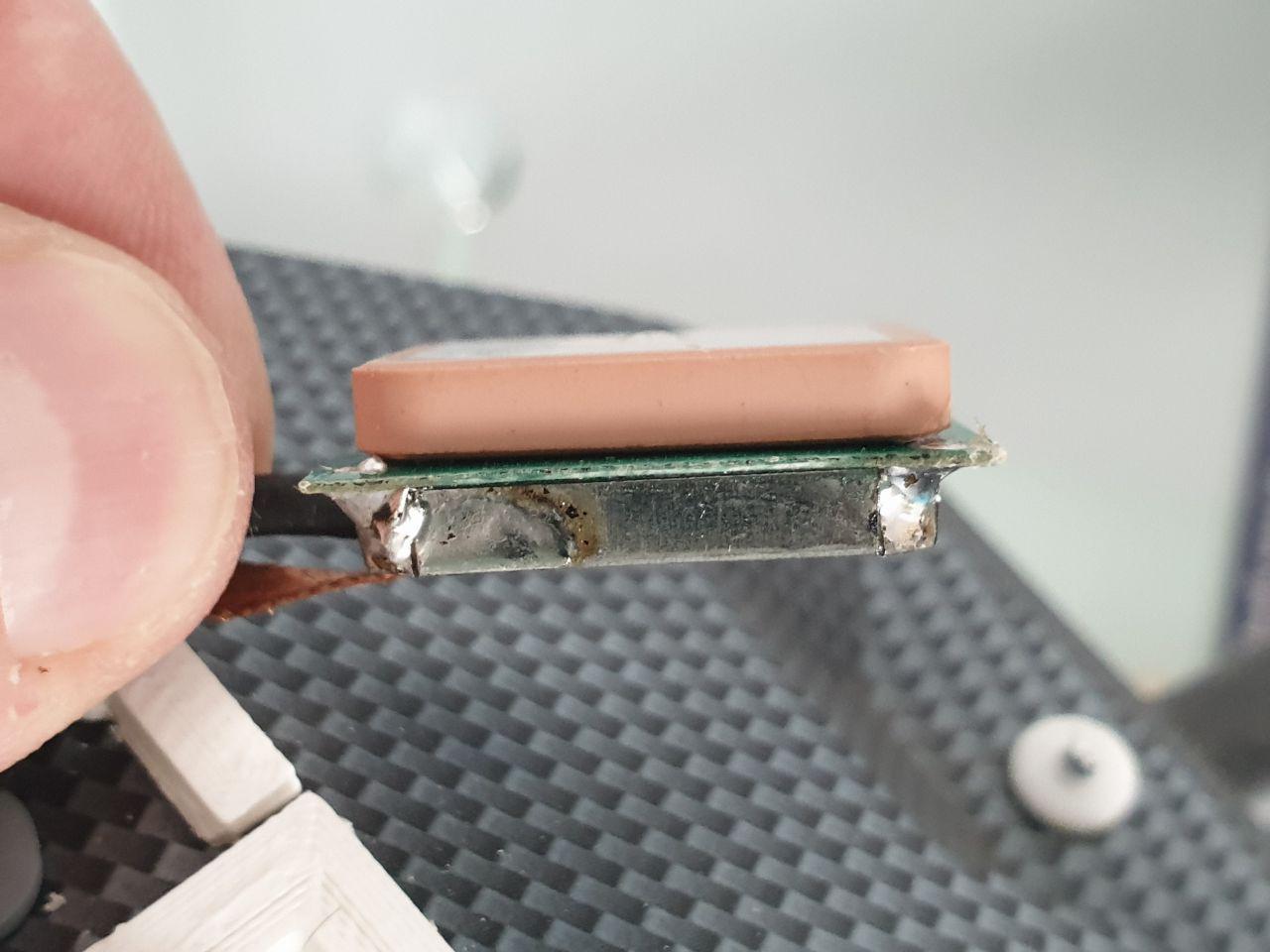
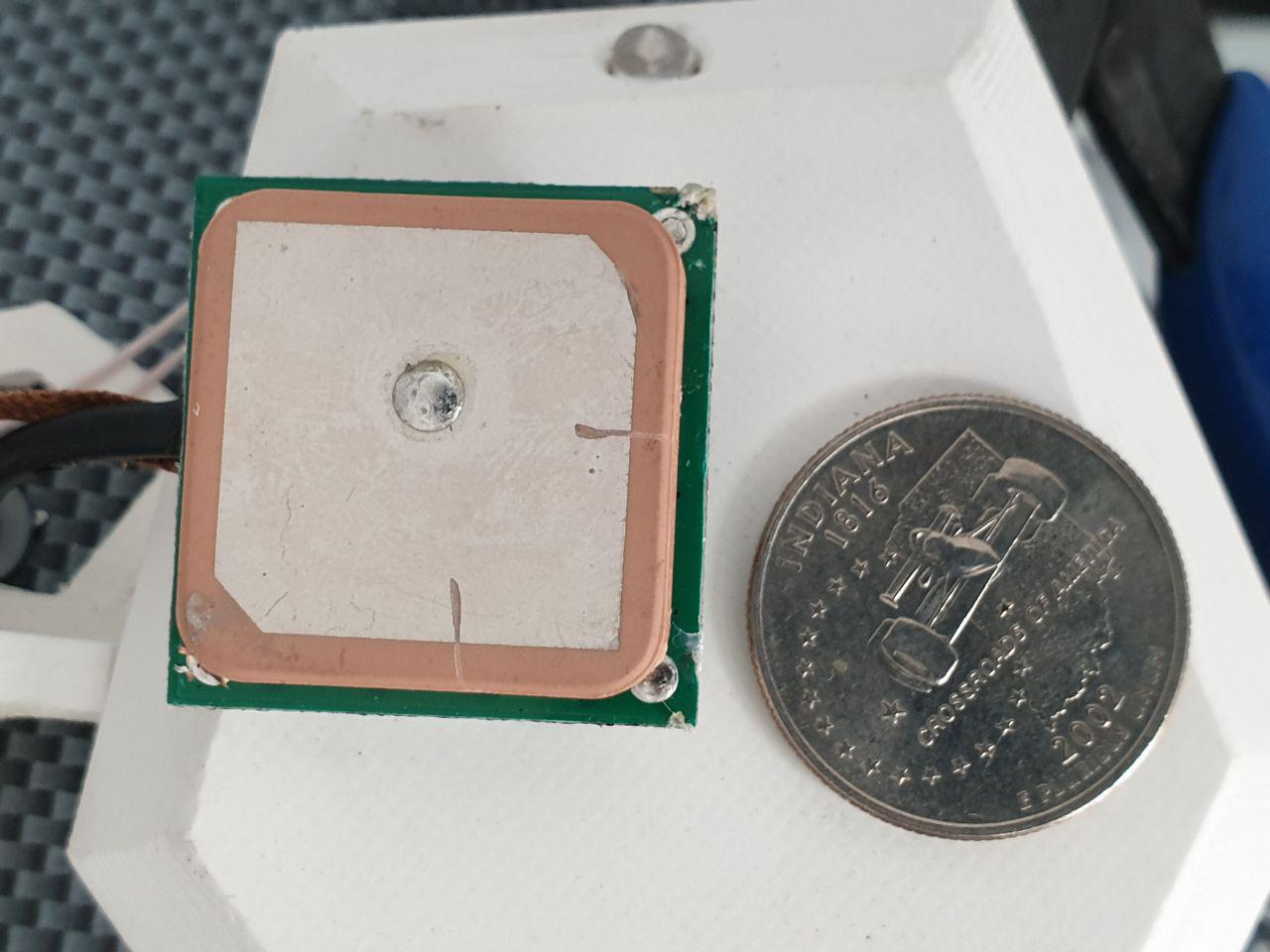
You can always ditch the bulky plastic case. The actual antenna is much smaller. Be careful to not overdo it though.
You may also shorten the cable if you have some basic soldering skills.
If you decide to stick the antenna on top of Navio2, make sure you add a ground plane under it to get rid of RF interference.