



Hello!
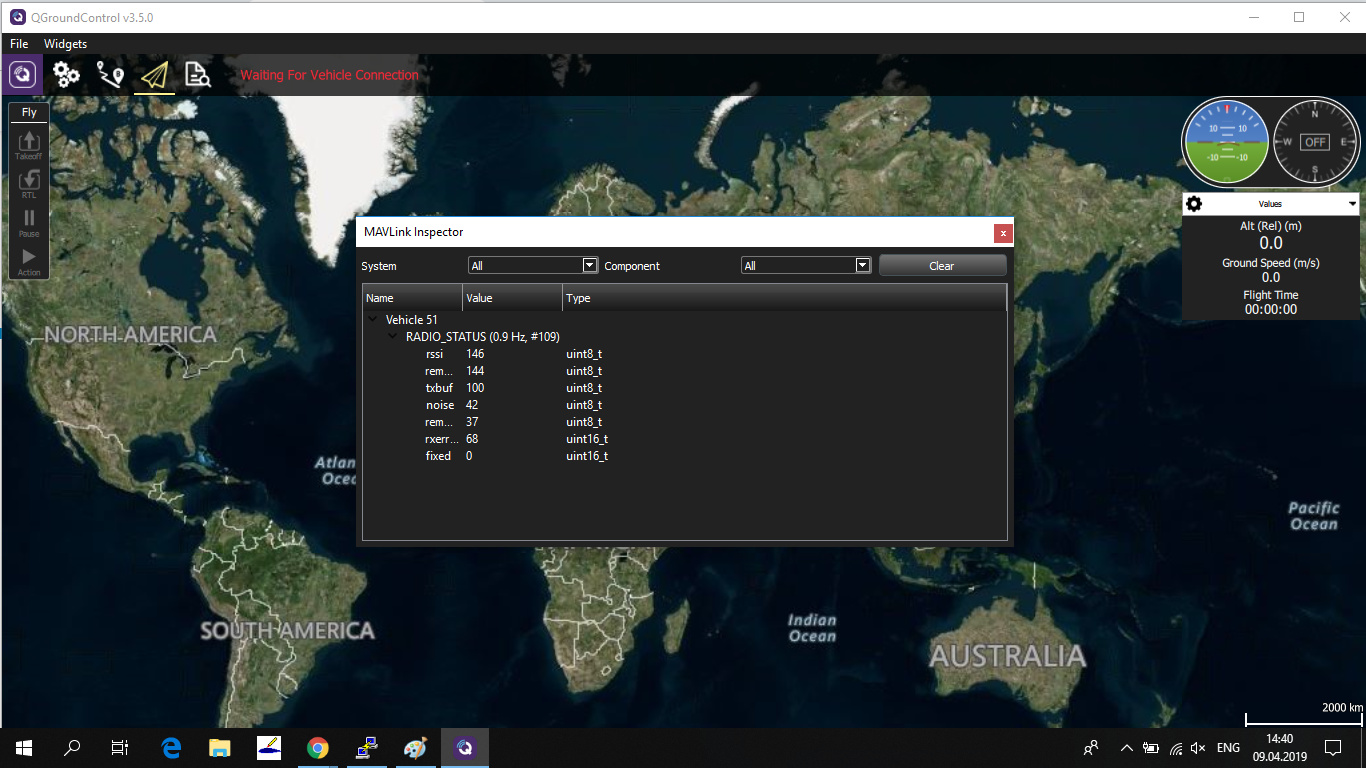
I have some problems with connecting navio2 to GCS via telemetry radios. (But it sucsessfully connects to GCS via UDP/TCP)
So I can see the vehicle in Mavlink Inspector Console (QGroundControl), but it still waiting for vehicle connection.
It can’t connect to MissionPlaner too.
In APM planner the status is ‘connected’, but no any parameters are sending from vehicle to GCS.

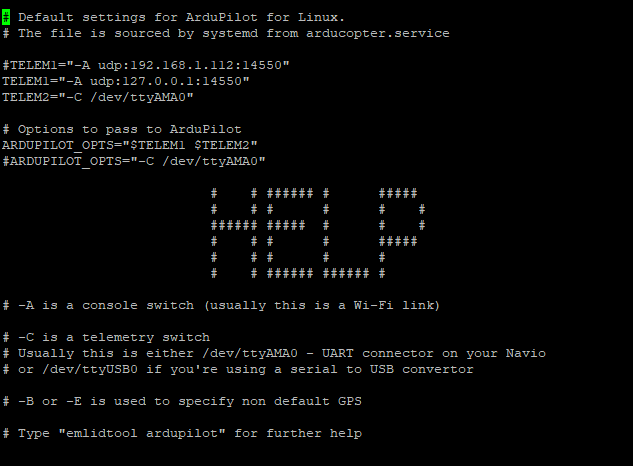
I’m using the latest versions of GCS, Emlid-raspbian and SIK radio.