



I’d like to run some real time tests using the original UBlox messages between the base and the rover rather than RTCM3 to see if this improves the processing robustness. I see that the Reach can consume UBlox, but I didn’t see a way to configure the base Reach’s server to output UBlox rather than RTCM3. Is this possible with the current beta version of ReachView?
FYI: I worked with the author of the RTKExplorer blog to configure the base to emit UBlox messages and the rover to receive them. I was able to get RTK Integer Fixes in much less than a minute using UBlox formatted messages. There seems to be an issue with the currently used RTCM3 messages.
Hi Rob,
There is a constant ubx stream from the receiver on TCP port 2000, it is very convenient for testing. We have done plenty of comparison between direct streaming of ubx and rtcm3 and did not notice any difference. How reproducible is it? Which RTCM3 messages did you use?
It seems pretty reproducible. I’ve had difficulty for weeks now getting live RTK Integer fixes with RTCM3 messages. (See Difficulty getting live RTK Fixes with 2.1.6)
I’m only using GPS satellites given that I was getting worse results with GLONASS and SBAS. I’m sending RTCM3 1002, 1006, 1008 messages.
I ran this test where I started with UBlox in Hold and Fix mode and quickly got a fix (16:25), switched to Continuous and quickly got a fix (16:30), reconfigured to use RTCM3 and got no fixes (16:33-16:41) then reconfigured to UBlox and got a Fix again (16:42).
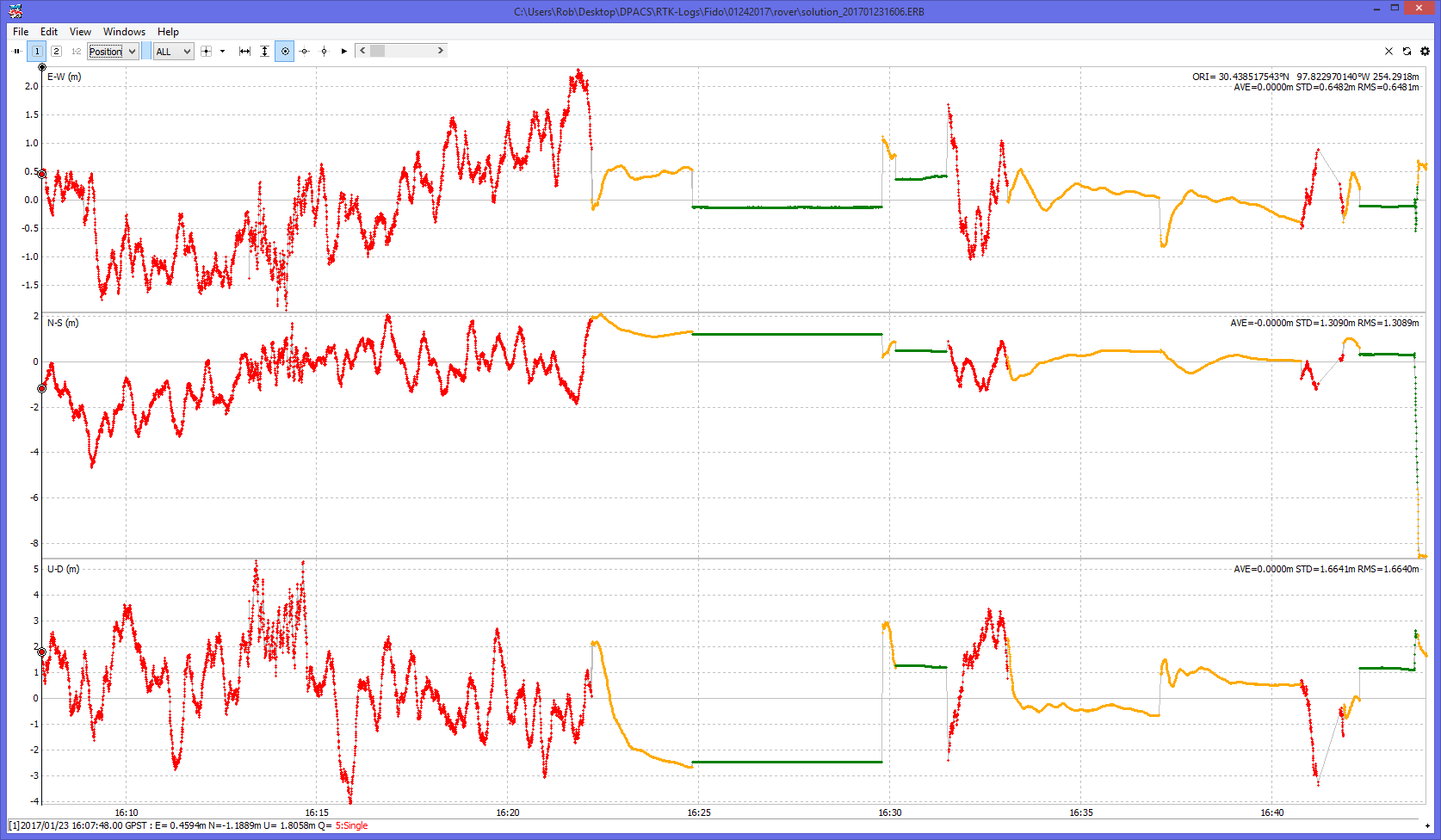
I uploaded the logs here:
I also had to change the rtk.conf file in /usr/bin/RTKLIB/app/rtkrcv on the Rover to take care of the base position:
ant2-postype =single
ant2-maxaveep =1
ant2-initrst =on # (0:off,1:on)
If there is a constant UBX stream on port 2000 and I can use that for RTK, then does that free up the configurable stream to go to file ?
Time to test
HOw would I use this for my RTK corrections to allow me to then send the base corrections to a file on the base?