Hi,
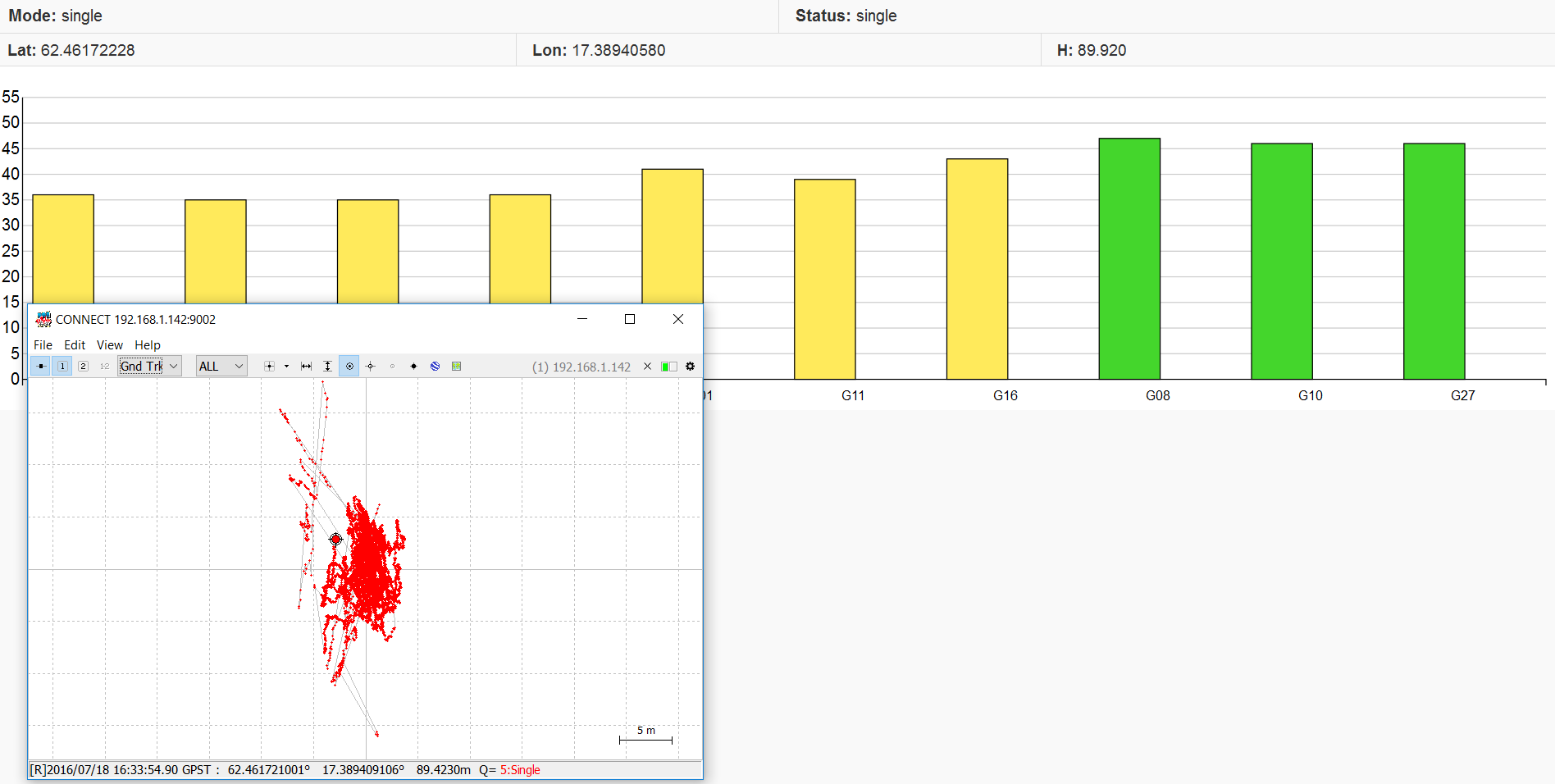
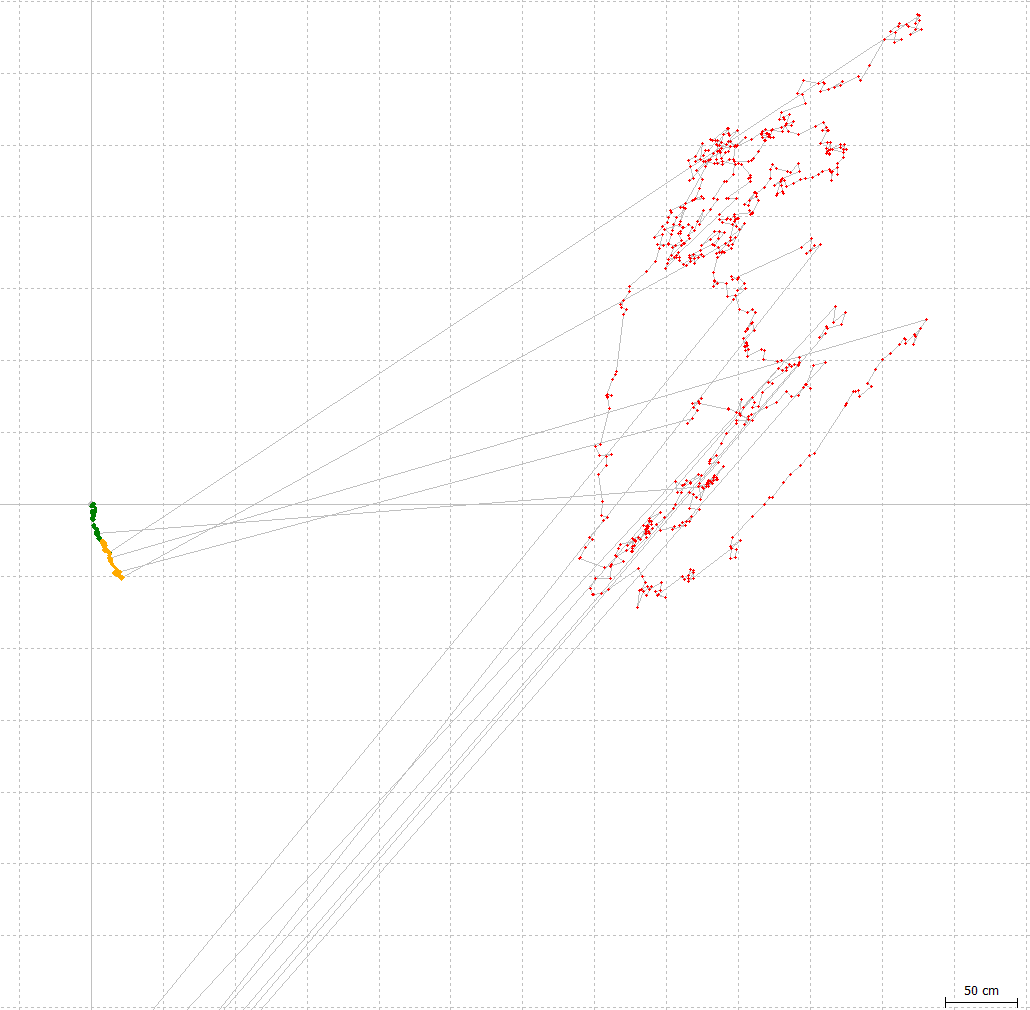
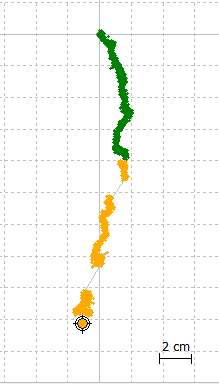
I have tried all kind of settings for the rover and I can’t more then 3 sats green in “Status” I have it in good location wtih clear sky. It jumps 120m in rtkplot.
Hi,
I have tried all kind of settings for the rover and I can’t more then 3 sats green in “Status” I have it in good location wtih clear sky. It jumps 120m in rtkplot.
please paste some screenshots from rover and base
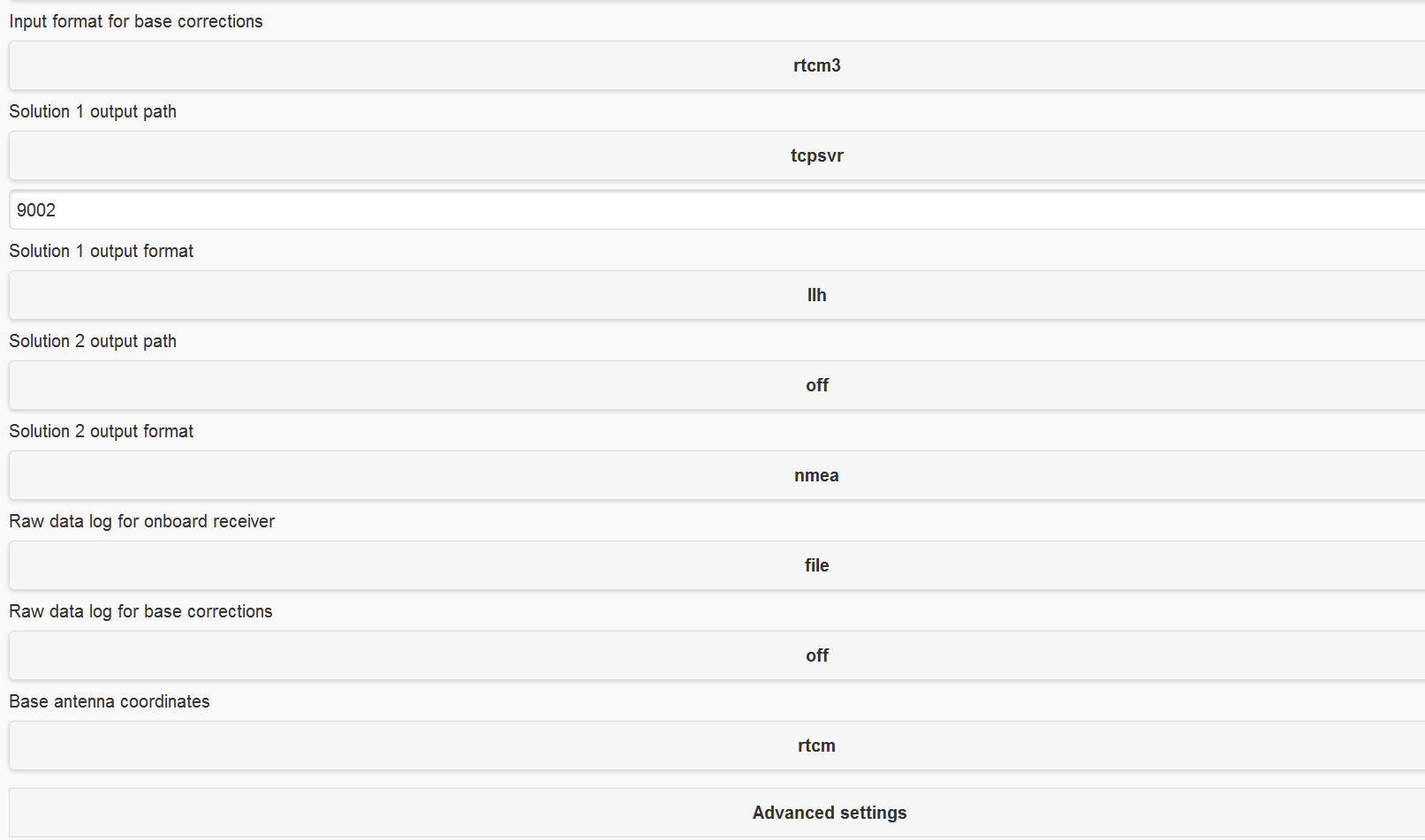
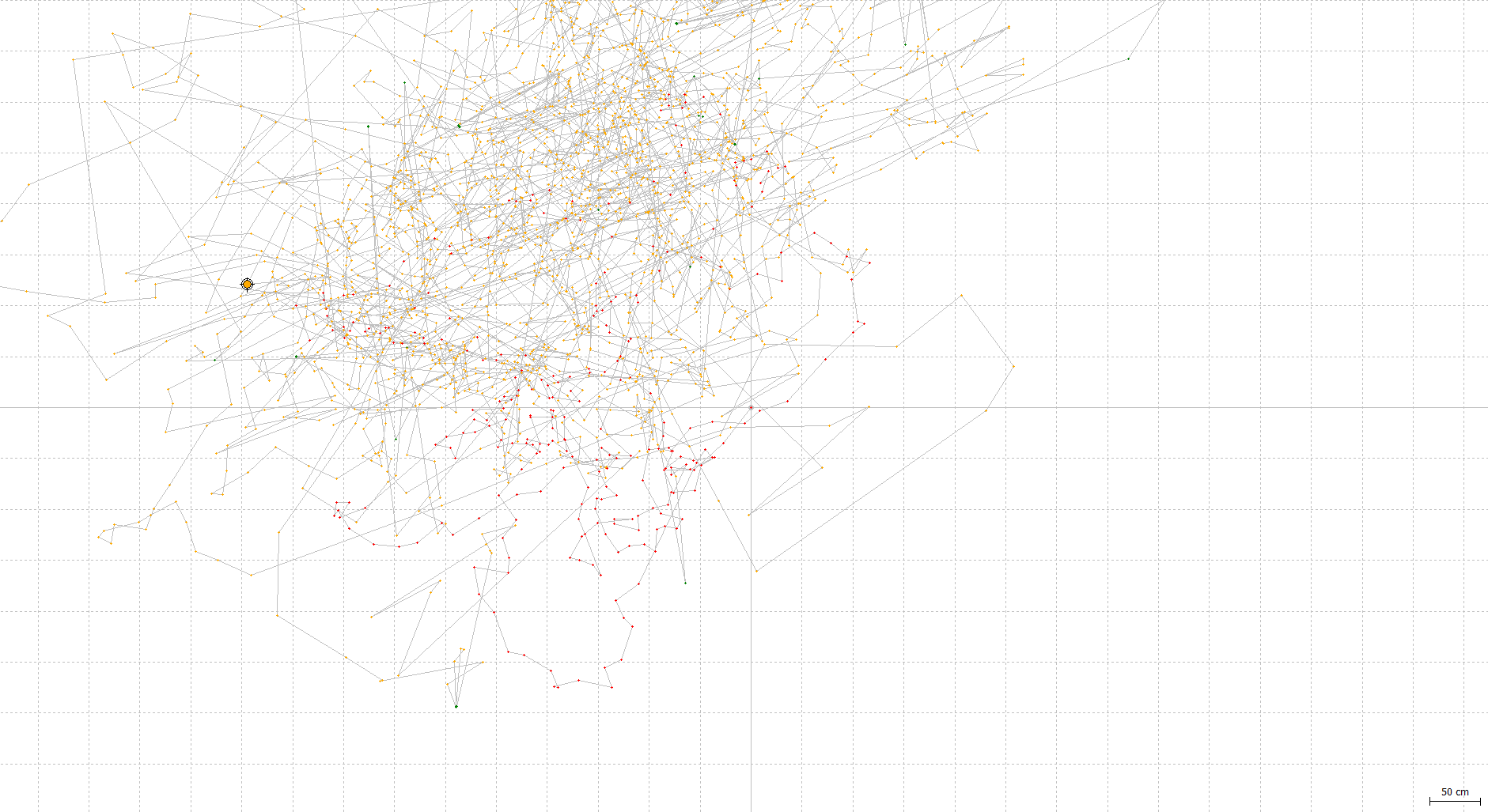
I started to try to get a solid signal with just rover single first I don´t know if that the way to go? Now I get alot better result but don´t know if it´s good enough?
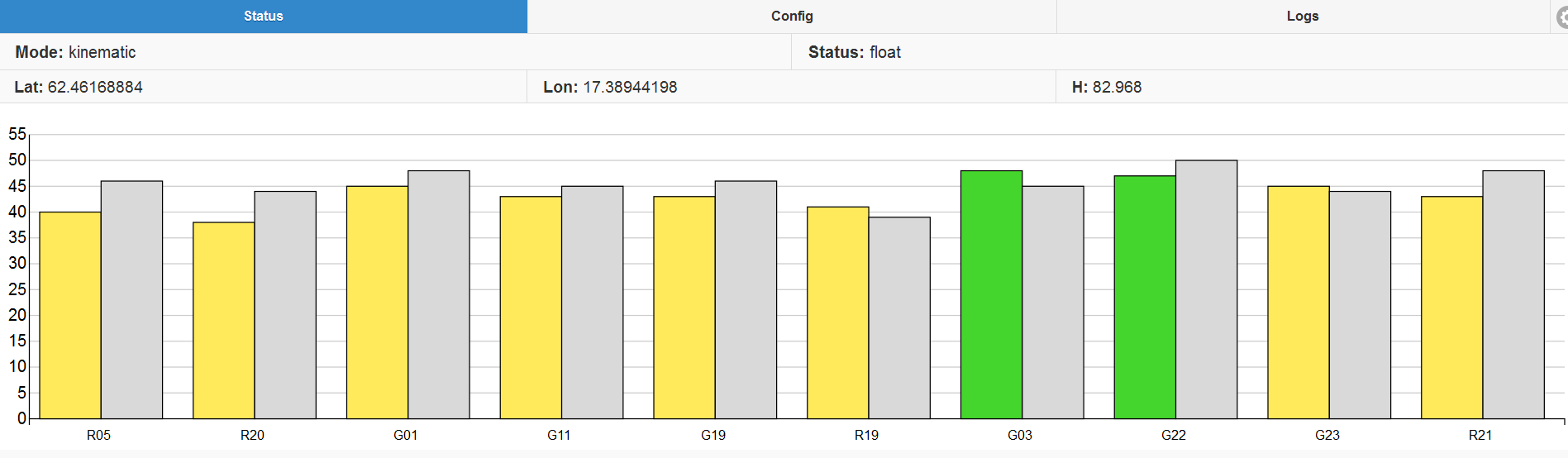
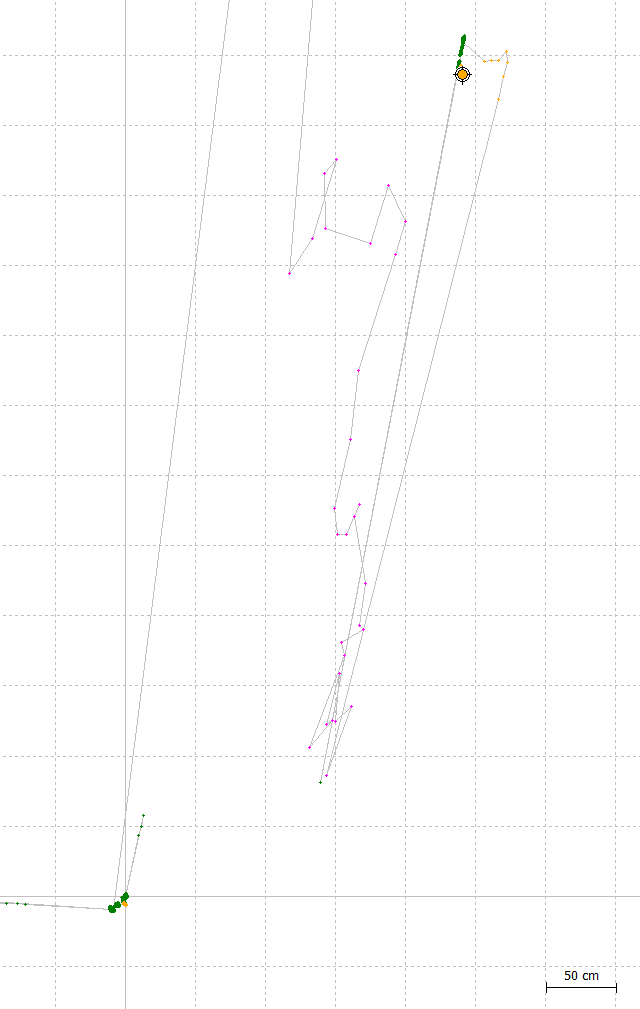
Here is with base enable
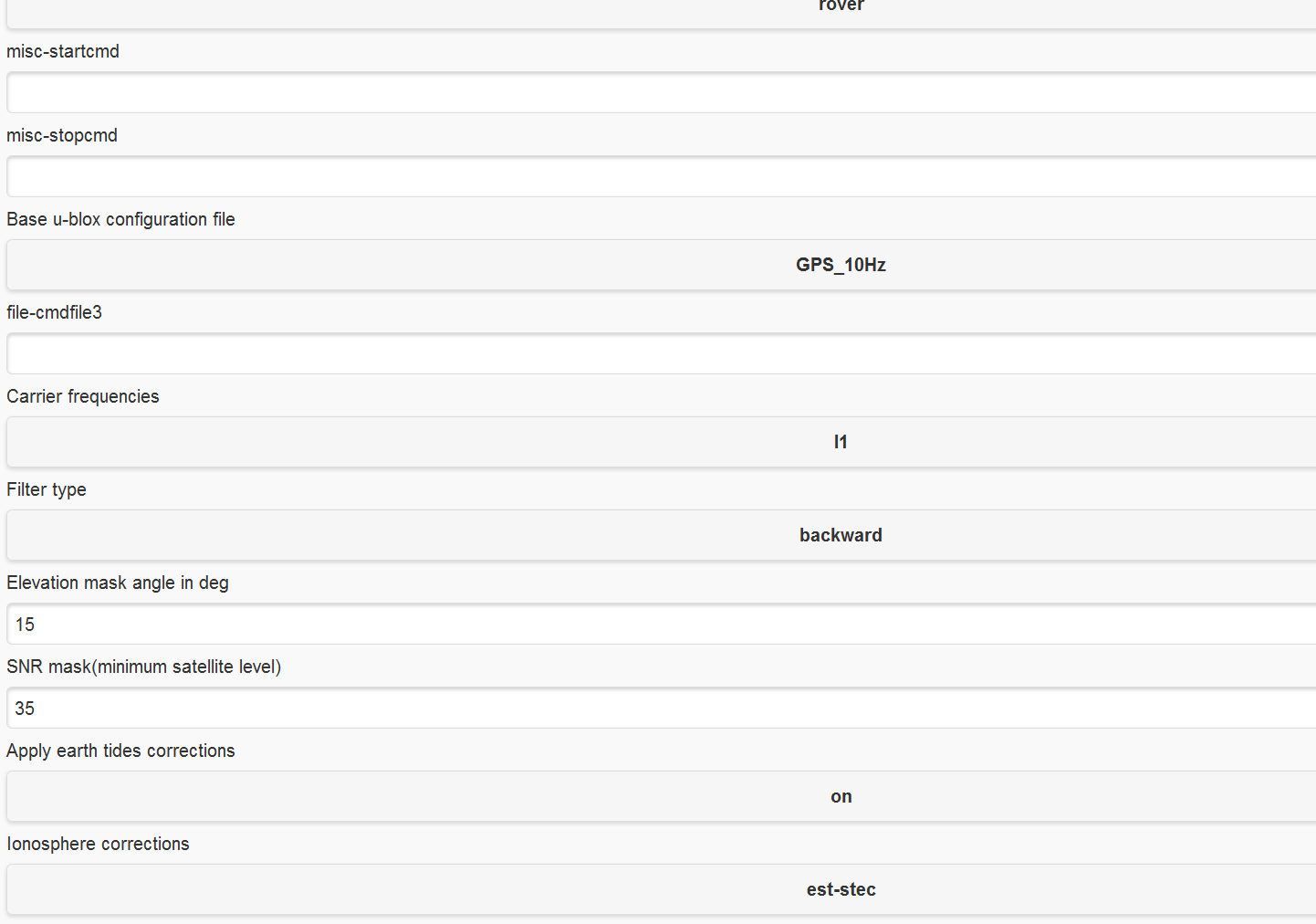
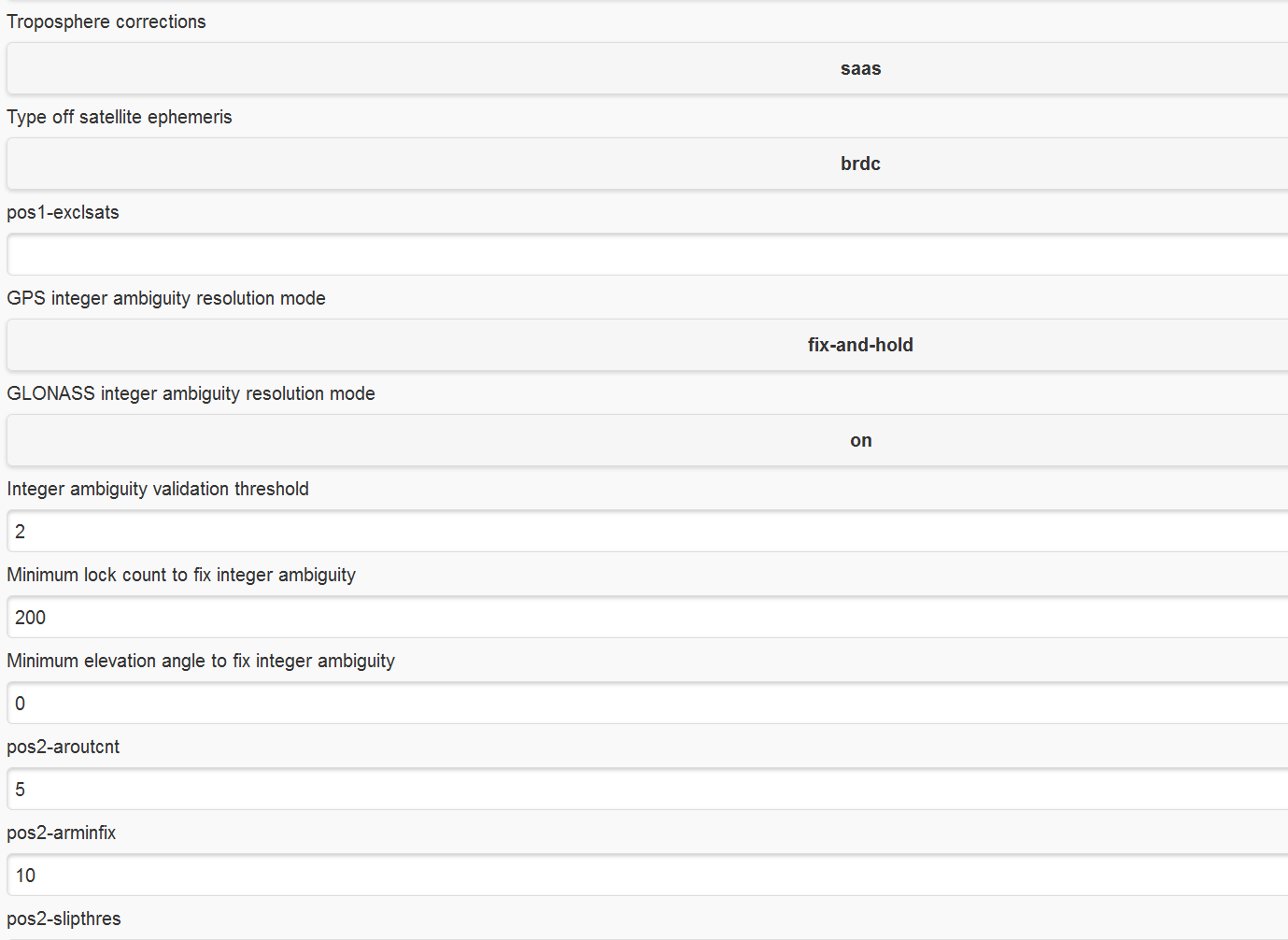
try to start with gps/glonas 1hz at base/rover/advanced settings
clear view to the sky for rover and base
metal ground plate
i dont see the grey bars of the base station…
set up correct link for it…
andreas
ok! and were is your rover?
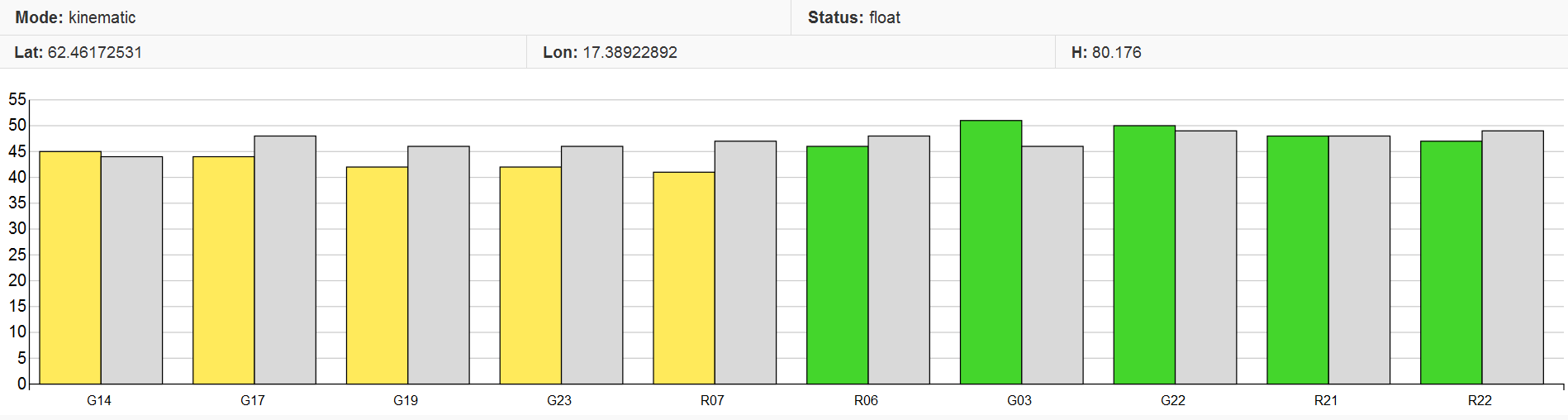
the grey bars are for the base - they look okay.
FYI, ReachView default SNR mask(minimum satellite level) is 35.
So ReachView it will be considering 8 satellites from your first screenshot and all 10 satellites from your second screenshot (and maybe more).
In your second screenshot, 6 GPS are showing and and 4 Glonass. Given enough time, the integer ambiguity could be resolved by the 6 GPS satellites, but not with only the 4 Glonass.
I am new to this but can you explain why all this different config need to be done? Is it not possible to make a general config that is working most of the time out of the box? I have both phone and quad with GPS chipset and antenna that is worse then reach and I never get this bad jumping in position.