I am trying to get an M2 to receive a correction input from a RS2. I would like this to be independent of an external network so I want to use the RS2’s internal network to publish the TCP packets. So far I am able to connect the M2 to the RS2 hotspot and have the RS2 Base mode set to TCP on the localhost. However, when I set the M2 to that host (192.168.42.1) I do not see a connection.
Is this system a correct setup that should work and if so am I missing something to get it working?
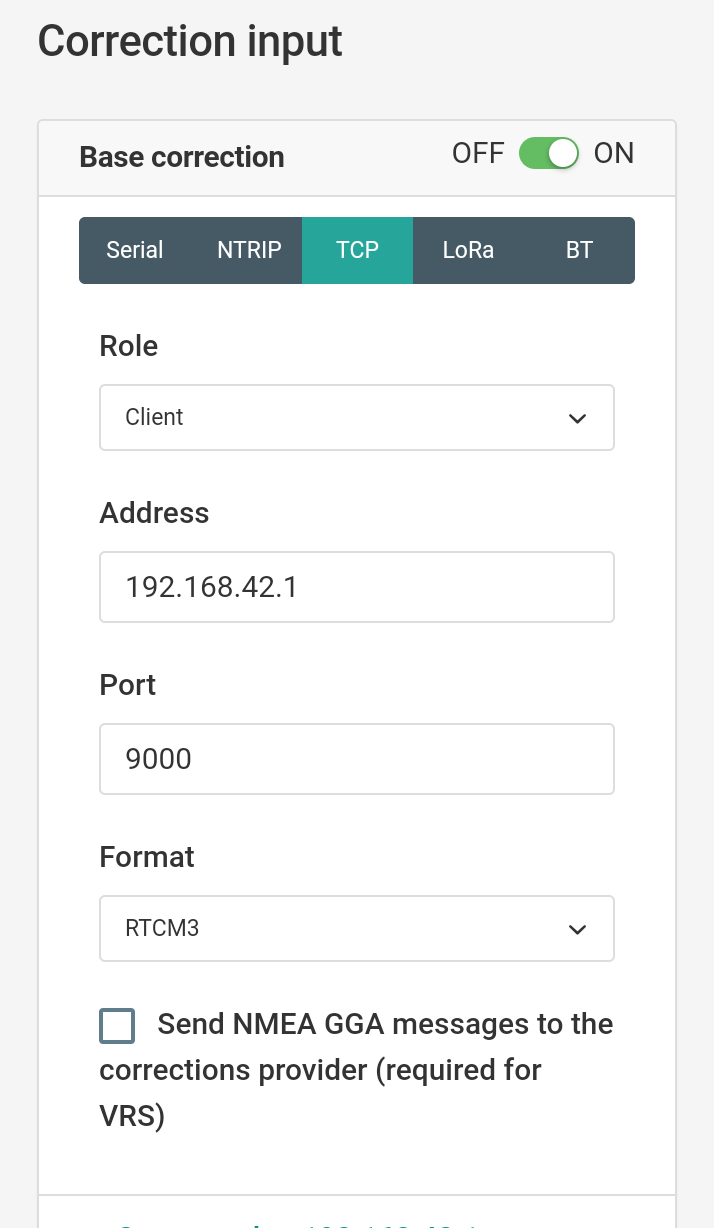
Please check that your configurations are the same as on the screenshots.
And as @bide mentioned above, this setup has a limited range between base and rover. During our test, we could achieve approximately 7 meters maximum baseline.