Hi everyone,
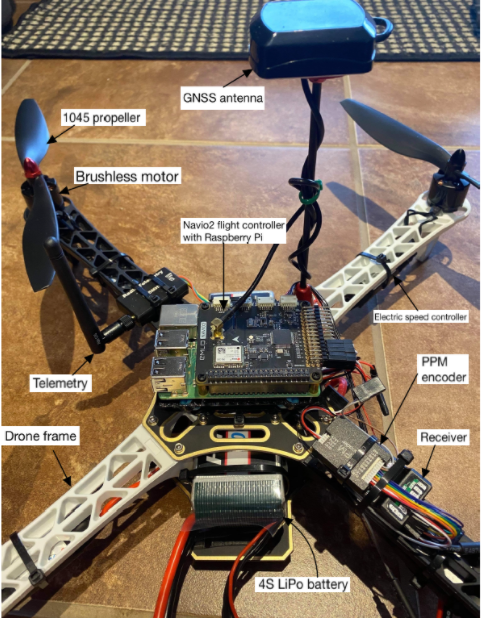
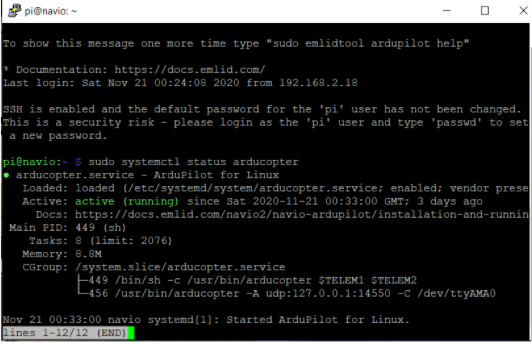
I am currently building a navio2 drone for my SLAM project, and I am pretty new to the flight control and RC drone field. I have all the components assembled for the drone and have the ArduPilot activated on the Navio2 board. I have also done all the necessary calibrations on mission planner. I have attached my drone pic with all the components labeled on it as well as navio2 and mission planner pics.

After I finished all the calibration on mission planner for the drone,
all brushless motors were not able to spin doesn’t matter how I controlled the transmitter, the drone is not flying. This is where I am currently stuck. The transmitter I’m using is a FLYSKY FS-i6X, and the receiver is FS-iA10B. Motors can spin properly if they are directly connected to the receiver and controlled by the transmitter. However, I need to use a PPM encoder so that it can convert the iBUS protocol to PPM which works for navio2.
One thing that may cause this problem is that I accidently busted my Raspberry Pi while using it with the navio2, one possible reason for that is I unplugged the electric speed controller cable from the navio2 board while the board is being powered on. The Pi stopped working after I did that. The navio2 board seemed to be working fine as I tried with a new Raspberry Pi and the LED light is working properly and I can activate ArduPilot. I kept the power input wire for one of my ESC and removed the rest’s power input wires before connecting them to the navio2 as they all have BECs. I am not sure if that’s the cause of the problem.
If anyone could provide some help on what may cause this problem or what I might have done wrong, it will be really appreciated! Feel free to ask me for any details on the drone that may help you see where the problem is!
1 Like
Hi William,
Welcome to our community forum!
Which model of ESCs are you using?
Hello Artem,
The model is BQLZR 30A SimonK Brushless Speed Controller ESC (with BEC). I got them on Amazon: https://www.amazon.ca/gp/product/B00SF5HH8U/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1
I also just realized that when I was doing the radio/transmitter calibrations on mission planner, the software does show the highest and lowest value when I adjust the nob. However, the motors were not spinning at all when I was doing the calibration. Were they supposed to spin?
Hi,
no, the motors are not supposed to spin during transmitter setup / calibration. …would be bad idea if motors run suddenly at full speed whilst not all channels are calibrated. - You wouldn’t be able to control drone that way.
Are you aware of arming procedure ? --> Throttle stick to bottom right for a few seconds. Then control LED will change, motors will start running at low speed (unless configured differently) and MP will show “Armed” if you got it connected.
- To dis-arm simply repeat procedure but this time moving throttle stick to bottom left.
Assuming that you are aware of this procedure then the other reason for not arming is some Failsafe / pre-arm item is active and preventing it from arming. The easiest way to find out if that is the case connect your GS and check for any pop up messages. If sound is activated the GS will actually call this information out. (Both in MP and in QgroundControl).
Hope this is of some help.
Safe flying…
Hi Karl,
Thank you for pointing out the arming procedure, I have actually never thought of that due of lack of experience. I will look into the arming procedure based on your suggestions and see if I can make it fly!
Thanks
Stick to bottom right did work! Getting used to control the drone properly now. Thank you!