



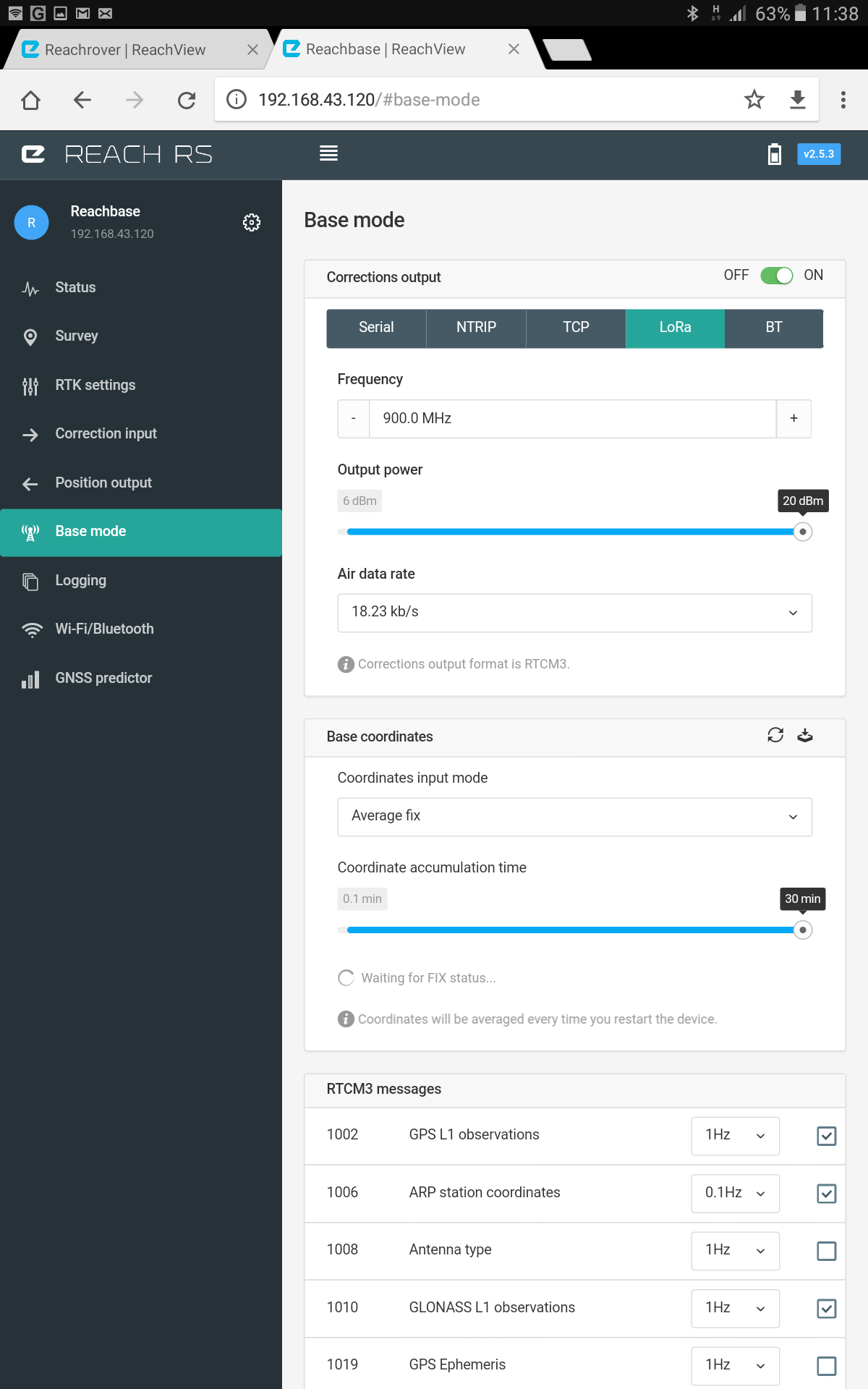
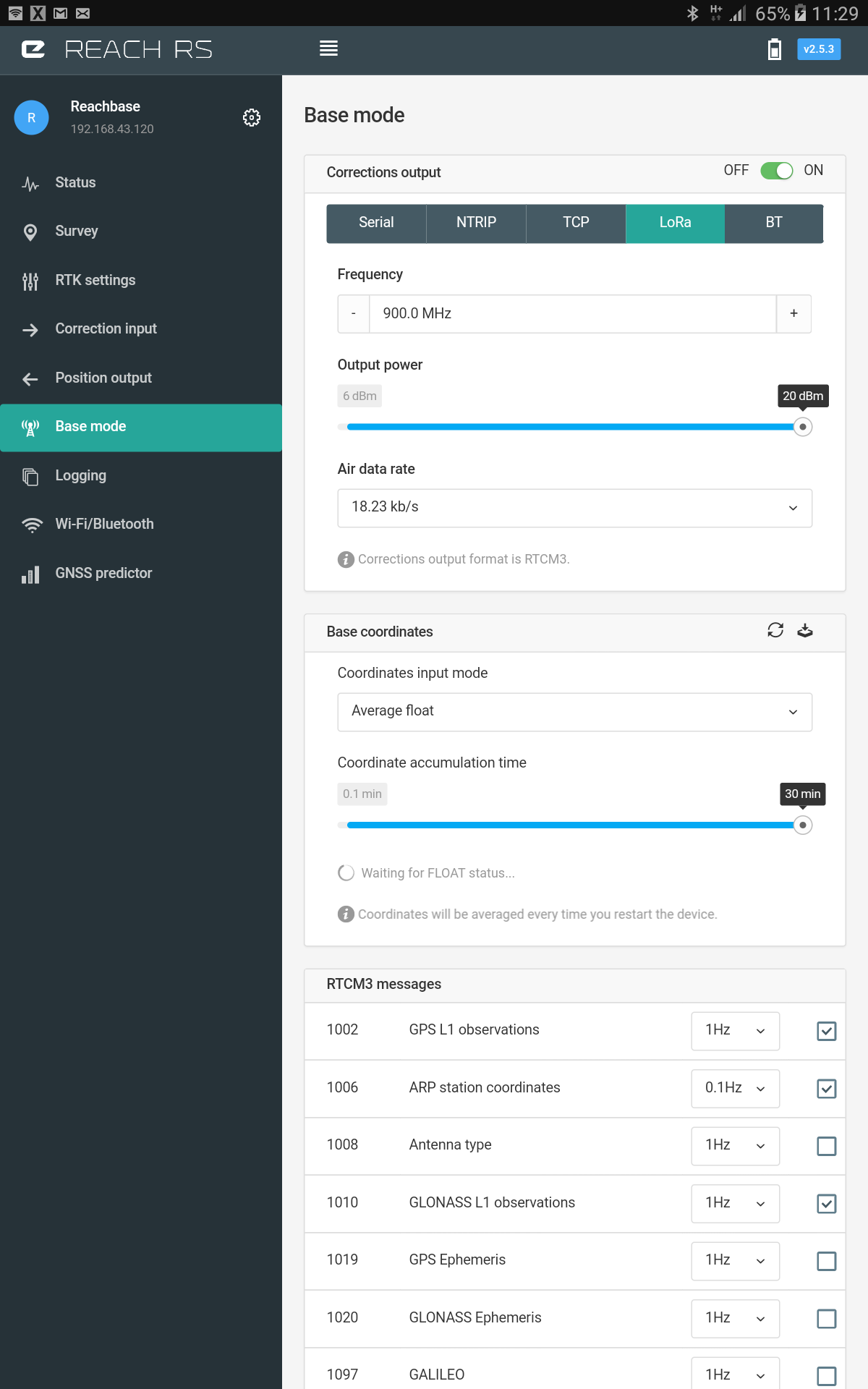
When I am setting the base station up, the base section of the software it is possible to select from average single, average float and average fix. What is the difference between the three and what is the most accurate? When I select Average Single it seems to work but when I select Average Float / Fix it doesn’t seem to complete its calibration process. Can anyone help?
From our docs:
ReachView has a unique feature that allows it to determine base station position while working as a rover from another base. This is done by obtaining RTK Fixed solution, averaging it over a period of time and this way obtaining an accurate position for the base. A typical scenario would involve setting up a local base station by determining its coordinate from NTRIP and then broadcasting correction locally, thus reducing the baseline for rovers and improving positioning performance.
If the reference station is too far away it is possible to average float and still improve the accuracy of the position.
In case no correction is available when setting up base or absolute accuracy is not required averaged single coordinates could be used.
https://docs.emlid.com/reachrs/common/reachview/base-mode/
So in order to average Fix or Float position your base need to receive corrections from another base station.
Hi Igor, is it possible to use my Rover as a second base station to set up the first base station and then revert to a Rover again? Thanks for your help
Well technically yes, but that will not improve anything  You will get precision, but not accuracy.
You will get precision, but not accuracy.
The idea is that you can tie your base coordinate to absolute coordinates by connecting it to a reference station. RTK positioning is relative. Reach can determine vector from rover to base with sub-cm precision, then it adds this highly precise distance to the position of the base. This is how you get rover position.
We are preparing a very detailed writeup for the docs on the topic of setting up a base station.
What is your final application?
My final application will be producing maps and 3d models using UAV’s with Ground Control Points. Survey.pdf (973.7 KB)
Hi Igor, would this work:
- Set up the base station using average single
- Take a position from the Rover
- Use post processing to establish accurate position of Rover
- Set up the base station in the same position the Rover was in and enter co-ordinates manually
Thanks for you help
@caspuk if there is no base station available in your area, you can average the base coordinates in single mode for about 7-8 hours and thus establishing a temporary bench mark at that point. Now you can use NRRIP protocol and get the precise position of rover anywhere in you city.
PS: NTRIP uses active Internet connection both at base and rover ends.
Hello Abhi, how are you?
That sounds very interesting could you answer a couple of questions please?
1 What is the maximum range I could have between Base and Rover using NTRIP protocol?
2 The maximum time I can take Single Average positions is 30min on the EMLID software, can I overide this?
Thanks for your help and time
@abhi_pathania Hello Abhi, how are you?
That sounds very interesting could you answer a couple of questions please?
1 What is the maximum range I could have between Base and Rover using NTRIP protocol?
2 The maximum time I can take Single Average positions is 30min on the EMLID software, can I overide this?
Thanks for your help and time
Hey, I’m great, thanks.
The maximum distance u can use this thing is as far as you are getting good internet connections on both ends, for instance if you take your rover to a forest area with no cellular network(no Internet access) it wont work. But you can use it anywhere in a city as big as london given that atmospheric conditions are almost same at both ends.
And the answer to your second question is, there is a logging tab on the left side of the beta version of reach view app, if u open that, there are 3 options with a sliding button right next to them,
You can turn on the “LLH” logging slider and it will instantly start the lat, long,height logging, leave it open for the desired time(7-8 hours as i suggested) and when u turn off the LLH sliding button, it will automatically save the LLH file, you can download it and run it in MS excel. And average the latitude and longitude columns.
I will be able to provide some pictures related to this in a couple hours.
Hi Guys,
Please excuse my lack of knowledge. I understand that the accuracy of the rover is dependant on the accuracy of the base stations co-ordinates. What is the best method to get the highest accuracy for the base station without having to use a known surveyed point?
Can I utilise a GNSS network to get the co-ordinates for the base station then start roving from there. Or can I just rove within a GNSS network area without setting up a base station?
As far as the GNSS network is concerned, is this normally a subscription based service? Do I access that via the NTRIP method?
Thanks in advance.
1 Like
Answer to question #1; The instructions say the distance should be kept within 10km (see below). Your Rover could also get the NTRIP corrections from Internet, therefore no need to have a REACH Base unit. The Base unit is used when you want to generate your own corrections. My Rover was getting corrections (over Internet) from a NTRIP server located 1000km away and I was getting Float solution, however based on the instructions below, my accuracy would be 1 meter (or 1000mm).
https://docs.emlid.com/reachrs/common/reachview/status/
Baseline
Baseline is the distance from rover to the base. It should be kept within 10km, if it is increased further you might experience slower fix time and lower accuracy. Accuracy is decreased by 1mm each km of baseline.
If you don’t have access to known surveyed points (i.e., survey monuments), for example in USA
https://www.ngs.noaa.gov/NGSDataExplorer/
- you can hire a survey company ($100) to mark a point for you and use the information in your Base unit.
OR
- find out about a NTRIP server close to where you are located and have your Rover get the corrections that way. If you cannot find a free NTRIP server (and don’t want to pay for servers that charge a fee), you can do post processing (which is usually free and it is a service provided by the same companies who charge a fee for real-time updates). Anyway, as soon as, you find a known point this way, then you can use it in your own Base unit.
Thanks for info!
Can you use NTRIP to get an accurate point for the base station, then leave that setup and rove around your base station? Or does that defeat the purpose of NTRIP?
How accurate is it, roving within NTRIP coverage?
I only have one REACH unit (i.e., Rover), and I am learning myself. My understanding is YES, you can have your Rover get the NTRIP corrections (from Internet) and achieve 1 cm accuracy (assuming you are close to the NTRIP server) and use the FIX location information as a Benchmark in your Base station (it appears that you can even get better accuracy by doing post processing). Anyway, NTRIP is great if your Rover has constant Internet connection to a NTRIP server, otherwise you have to use your own Base unit for the corrections ( and a way to transmit the corrections from the Base to the Rover). For example, Department of Transportation in Florida (USA) provides free NTRIP corrections, and by using your cellphone as a hotspot, your Rover can get the corrections from Internet, however if you are somewhere with no cellphone signal, then you have to setup up your own base and also setup a way to transmit the corrections to the Rover. If you happen to be in Virginia, where there is no free NTRIP server, then you either pay $2500 for the real-time corrections or setup your own Base.
I think and find post processing againt a service (ntrip) of some sort that provide high accuracy, and do several measures over a periode of time to rule out errors.
There are more advanced methods with higher accuracy, but thats above my paygrade ![]() Like sub mm stuff, but i dont think my DIY is calibrated for that.
Like sub mm stuff, but i dont think my DIY is calibrated for that.
We only have pay pr use service (correction data). Other nations have free stuff yes.
I thought the Emlid Base can transmit the corrections to its Rovers via LoRa?
Yes, of course, if you have the REACH RS. I could only afford the REACH module. LOL…
@dmitriy.ershov wrote a tutorial, covering different ways to set up the base.
5 Likes
Hi Abhi,
Thanks for your help,
Could you provide pictures on how to do this please? I am bit of a novice so everything helps. Also, how do I access the beta version of the app?
Thanks again for your help
Mark