I use the Carlson SurvPC software with a windows data collector connected via bluetooth with the GNSS receiver RS2.
Using it as Rover works perfectly with RTK corrections via NTRIP and APOS. I used the NEMA emulation as shown in tutorials.
But how can I make the setup for Base-Rover configuration. “In SurvPC under Base setup there is no possiblity for NEMA, as NMEA is a 1-way protocol, which means SurvPC can just “listen” the receiver. Using the unit as an RTK Reference base is totally impossible operation to do with just the NMEA protocol!” - This is official statement from Carlson. The driver for Emlid is still missing.
I tried to do ist with the following procedure:
mounting the Rover on the tripod with Carlson SurvPC set to NTRIP over APOS
waiting for “fixed” status
manually reading out the position via Emlid ReachView – raw data
mounting the Base on the tripod
activating tin ReachView the base mode to UHF (LoRa)
inserting in ReachView the base position with the coordinates (raw data) get from earlier rover position (see 3.)
activating in the Rover setup via ReachView input corrections to UHF (LoRa)
disconnection in SurvPC the RTK from NTRIP over APOS
starting surveying
It looks it works, but waiting some time the coordinates got from Rover are floating from initial reading. So the result is not acurate!
I would prefer SurcPC is handling Base-Rover configuration, what is possible with other brands of receivers.
Please can someone from Emild give me information if there is intention to develope a particular driver for Emlid to use SurvPC with this drivers (as other receivers do - there is a long list in SurcPC!)?
Regards
Gunnar
Base-rover configuration on side of 3rd-party software is indeed something we still need to address in the future. At some point, we’ll have a workaround to make a workflow you use easier, however, currently there’s no estimated timeline for this.
Is there a particular reason why you don’t connect your base on tripod to NTRIP and just average the position? Once it’s calculated, you can set up LoRa connection with rover and start surveying.
What I have experienced with Topcon Magnet is that the base setup does not need to be done in Topcon and I would assume Carlson would be the same. The coordinate is averaged in or manually entered and once a fix is achieved in Reachview the Carlson/Topcon software sees the fix and operates normally from there.
I do it in that way, as the SIM card is inserted in the data collector, and this is to far away from the Base to get continuose correction.
Shall RechView for the Base be set to dynamic or static?
Why is there the difference (quite more than cm precesion) in coordinates and height after some time?
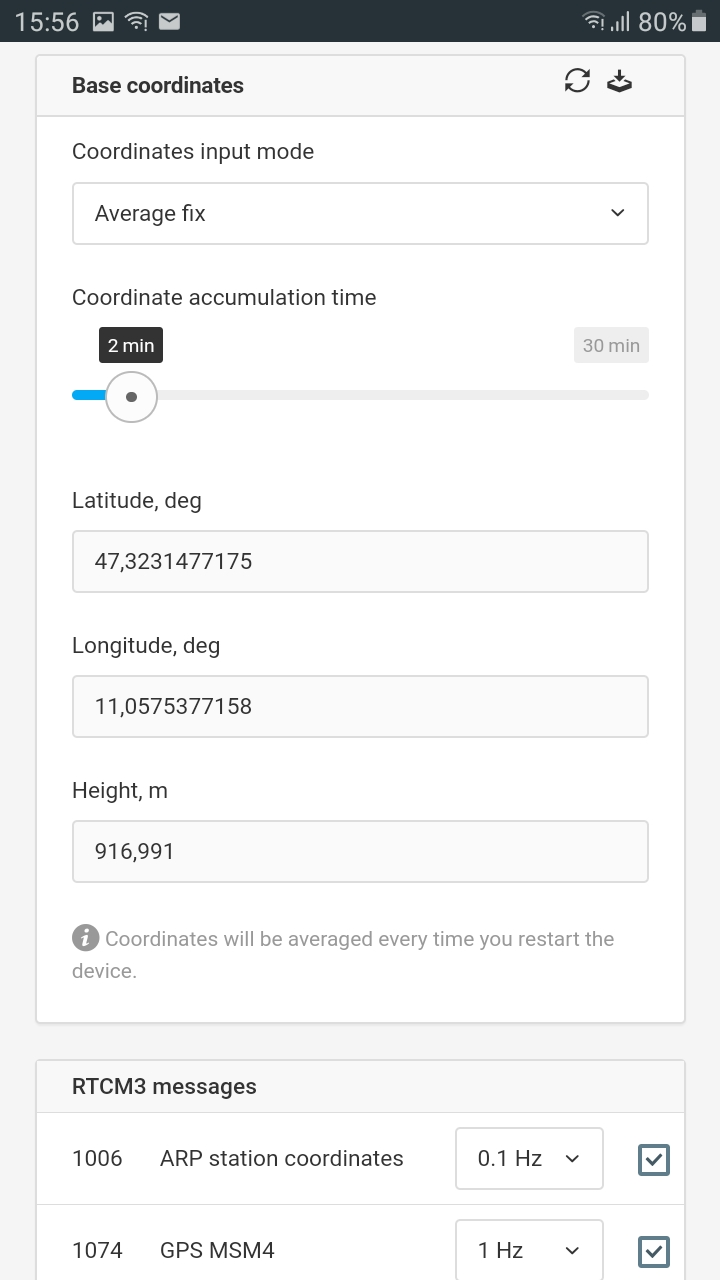
I tried out getting the coordinates directly connected the Base to NTRIP with “Average fix”. I waited for the proposed 2 minutes and the coordinates we computed. But there isn’t any button like it is mentioned in the docs you sent me the link: Click on the “save coordinates” icon and position will be saved…
Finally I disconnected the mobil date and collected some points. Coordinates are percise, but height was with a fault by 1.11 m! What’s wrong there? Pole height was correct and the antenna height with 0.134 for RS2 is correct, too.
Which height does the NTRIP caster provide? Is it orthometric or ellipsoidal? Please note that in the meantime Reach calculates ellipsoidal heights only.
Hi Tatiana,
thanks for showing me, where is the save button. I’ll try it this afternoon again. Maybe the fault with height can be found, as I haven’t used the save button.
APOS works with orthometric heights, in Carlson SurvPC is done the transformation to ellipsodial heights.
today I tried the save button, but this was a wrong information from you. It isn’t the save button, by clicking on it, it switches to manual input of coordinates and the averaged coordinates are gone.
Again I had this failure in height by 1.11 m. No idea about this failure.
Hi, it should save coordinates you got from average and place it in manual, if like you manualy typed them in your self. Didn`t this happen?
Could it be you hit save before the averaging was done?
Hi,
no I didn’t hit the “save button” before averaging was done. But the funny thing is, the coordinates were measured correct, so the Base-Rover configuration must be correct. Just the height is with this failure. Right now I did surveying in rover mode and corrections by NTRIP APOS - coordinates ok, height differs by appr. 1 m from points I got 5 years ago from a surveyor. Strange!
height got from GNSS: 919.751
height calculated with SurvPC (MGI M28): 869.3284
height calculated in official surveying homepage: 869.84
height got from surveyor: 868.11
Link from official surveying homepage in Austria: BEV Transformator 3.0
As @TB_RTK mentioned above, this button is used to save the coordinates you’ve got after averaging to manual. It allows you to keep them saved in ReachView: even if you reboot the device, the base position won’t change.
As for the issue with heights, would you mind sharing a bit more files recorded during the test so that I can observe them and try to understand why it happened?
UBX data from the Reach RS2 base
Base correction data from the Reach RS2 base
Position data from the Reach RS2 base
The coordinates of the point on which RS2 base is placed (which you got from a surveyor)