I also have intermittent wifi connection issues when using my android phone’s hotspot. But, in my case, I can ultimately get them to connect. And, the receivers actually do work very well. I know how frustrating it can be though when they seem to fight you!
If you have access to an ipad, you might give that a try if you have not returned the units yet. The ios device seems more consistent with it’s connections.
Also, I have had a support ticket in for the connection inconsistency issue and Emlid has found some things they can tweak that will hopefully improve the setup in a fw update.
Reachview3 does not currently keep the android phone from sleeping (screen turns off) and maybe this contributes to disconnects from the receiver. All of the drone flight apps that I use keep the device awake when in use. @svetlana.nikolenko could this be a factor in disconnects between RV3 and the receiver? Perhaps a “keep awake” feature could be added to RV3? I don’t know if this is relevant, just tossing out ideas.
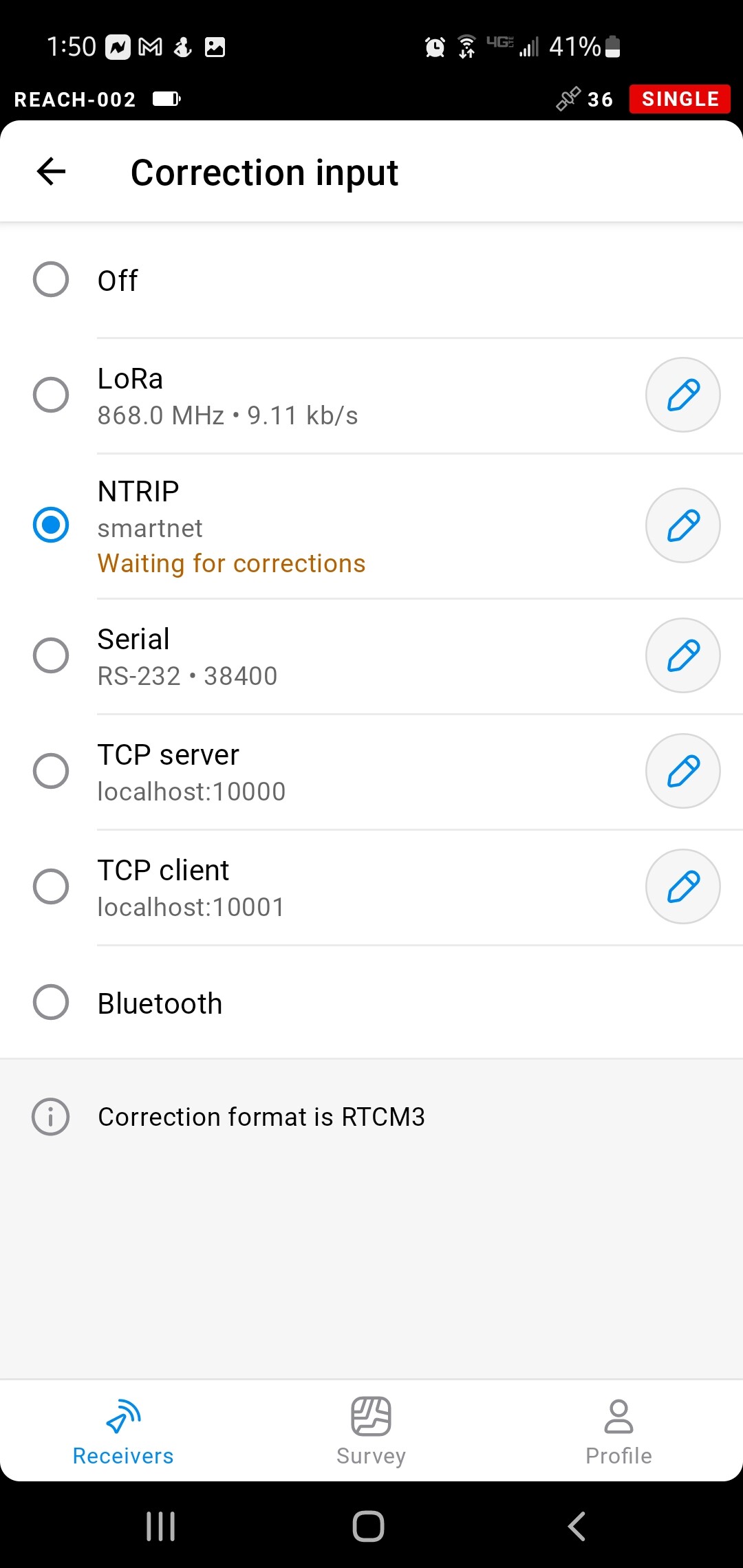
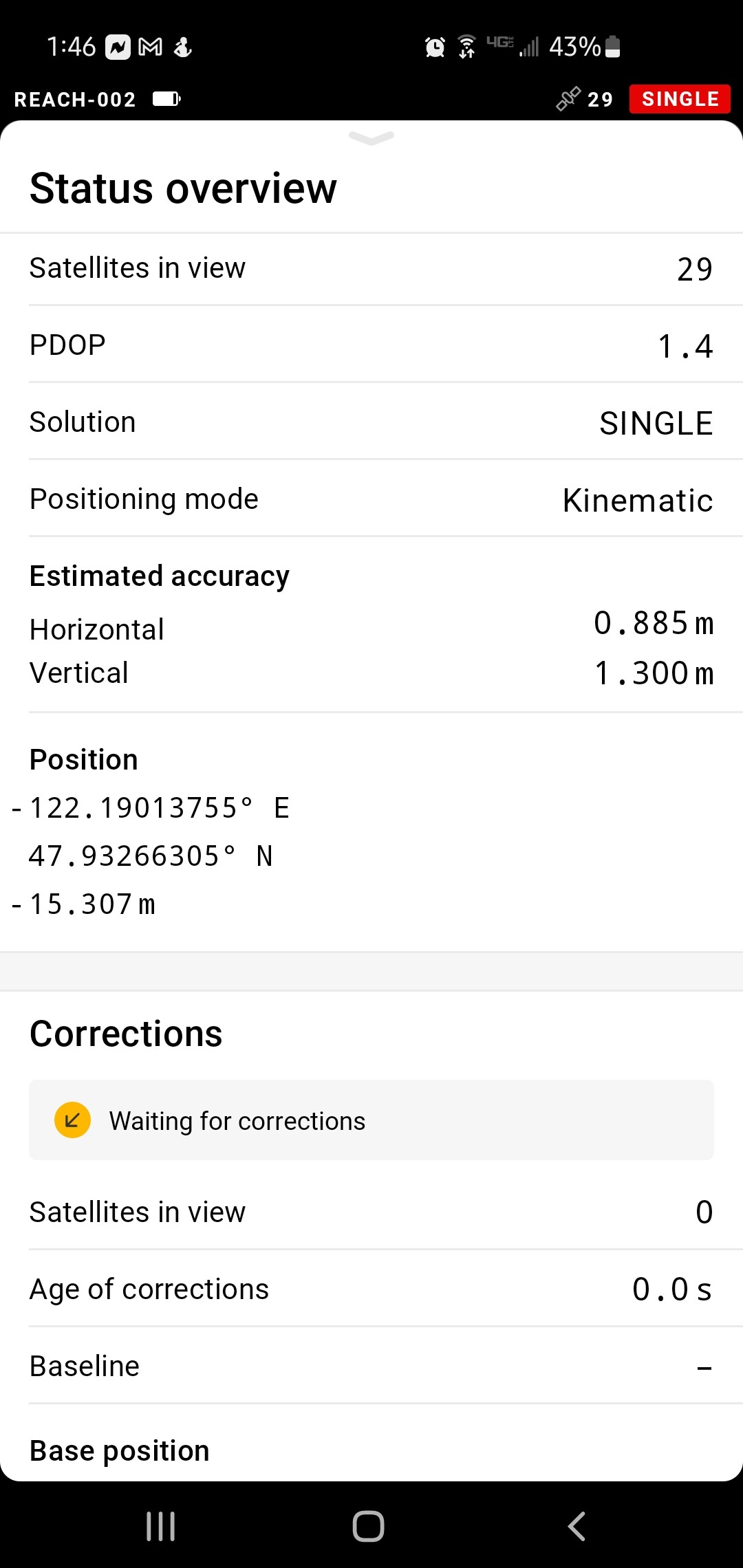
Hey, so we know you have a port open to the caster now, caster connects, and your rover connects to caster it but is not receiving corrections its waiting………
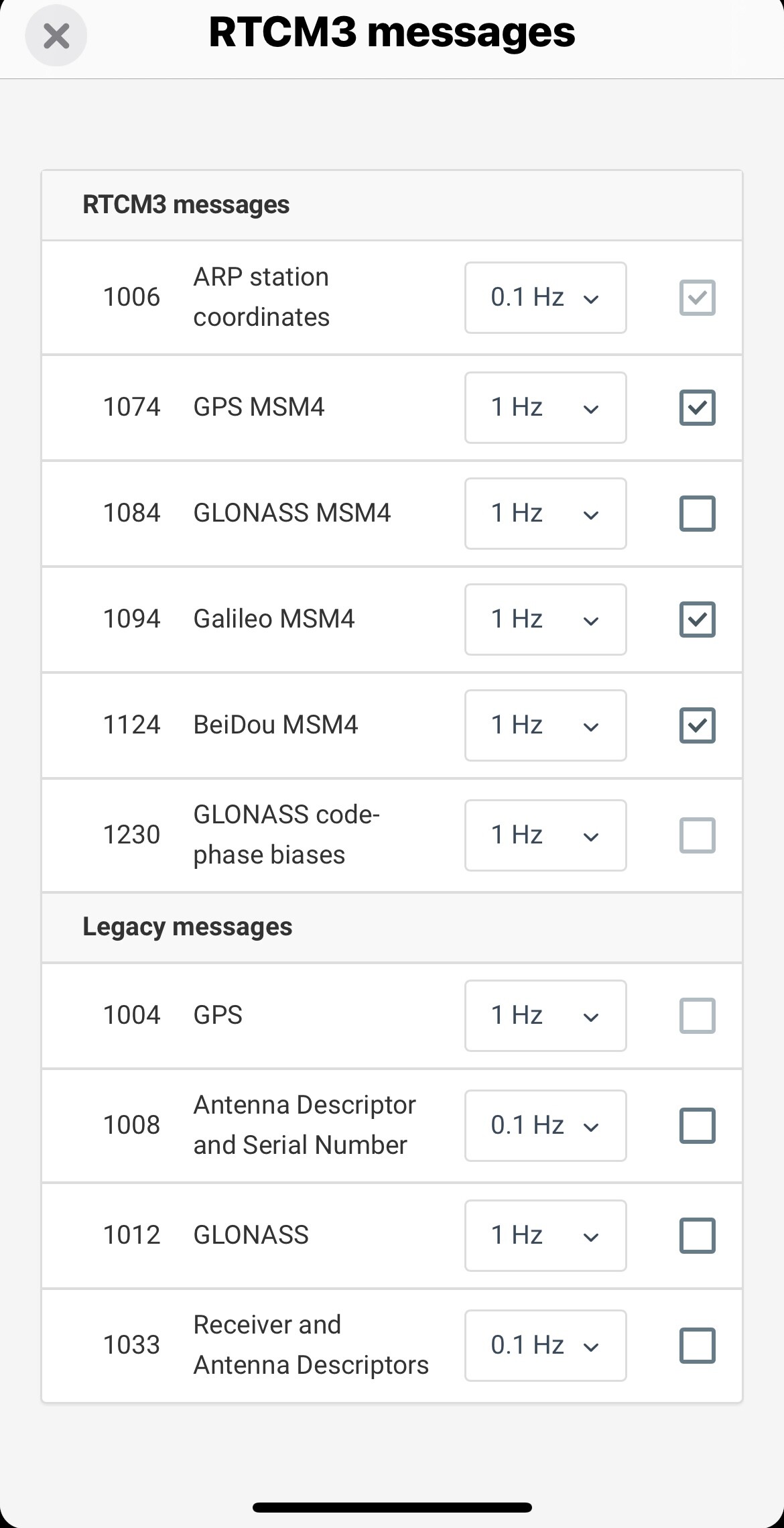
Did you remember to activate any of the correction messages?
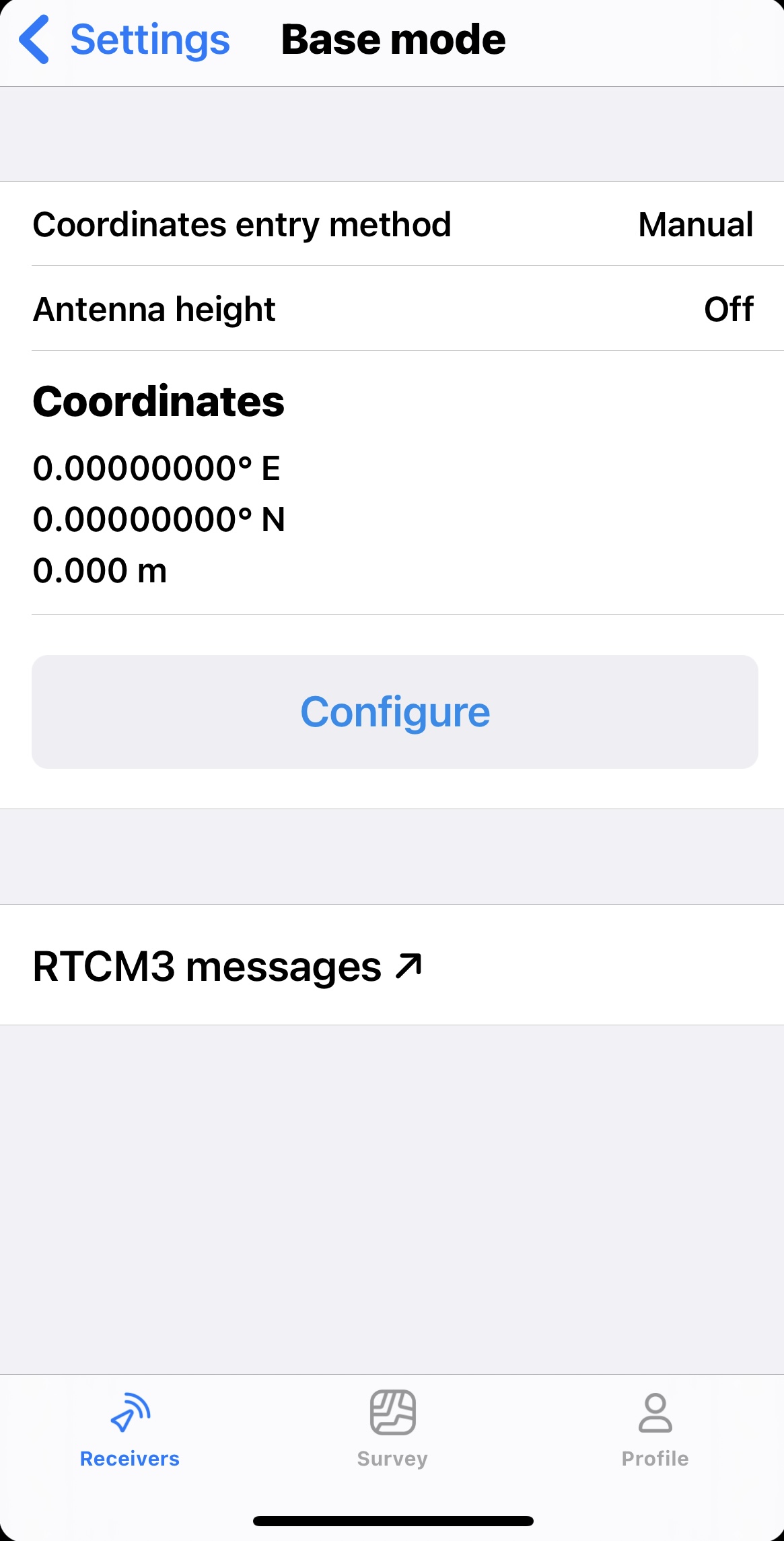
I notice on this unit they were all set to 0.1hz from stock, that wont do it. @svetlana.nikolenko new units all these settings are at 0.1hz? Confusing 1st time setup, might need new default values.
Extremely, I did check those but the message types didn’t match what was in my message list so i was hesitant to change any of that.
I change the message frequencies and see if I can finally get a correction, then it will be trying to figure out how to get my phone to connect via bluetooth.
Thank you guys for your suggestions! Just to avoid confusion: we also have a private conversation with Chris. And once we find out the reason for these issues, I’ll post it here.
ReachView 3 indeed doesn’t have it, but there is also a native Andoird Battery optimization feature. It allows the app to work in the background and prevent disconnections.
I’ll check the default settings. I was pretty sure they’re 1 Hz. But anyway, it shouldn’t affect Emlid Caster’s workflow. They may affect Fix obtaining, but the base still should be Online.
The base is or was outside, I am unable to try a different internet connection as if I do there’s no way to connect to my rover. So far I can only connect to the receivers if they’re on the same Wifi network. If I change my rover to my phones hotspot, It severs the connection between my phone and rover and the only way to connect back to my rover is to reset the rover so it puts its internal hotspot up then I can connect, but then I’m not connected to the internet. I’ve tried hooking the Rover and my phone up to the jet pack but I get the same results.
To ensure you are getting the corrections do you have any computer software that can see rtcm3 corrections?
If you do not, the “AgIO” program in this free open source project can. If we see the corrections we will know 100% that the base is fine and can quit troubleshooting it.
When you open AgIO setup the ntrip to see your base on caster, then connect, once connected use the expand arrow to see the corrections. Will post image once back at PC.
Im very interested where the break in communication is.
So I think I may have found the problem. I believe our office wifi’s firewall, which is heavily regulated by a third party… yay, is blocking my base from streaming a correction to the Ntrip caster. I’m going to take the units home this weekend and try on my home network and see what happens.
Click the blue arrow to view incoming RTCM
It will open a new side panel. It will show what messages and what hz they are arriving at.
Also in the photo it says “waiting” to connect, if it actually connects it will say “listening” and track the data usage. I do see data so it connected for 12kb and then disconnected. Very handy.
I think you are on the right track using a different router, Emlid correction setup is very easy unless some outside force is messing things up.