



I am using an RS2 and an M2 to do aerial photogrammery. The RS2 base gets real-time RTK corrections from a NTRIP server. When I do the RTKPOST correction of the M2, what is the best way to determine the base position?
RINEX header and average of single position seem to produce errors of several meters.
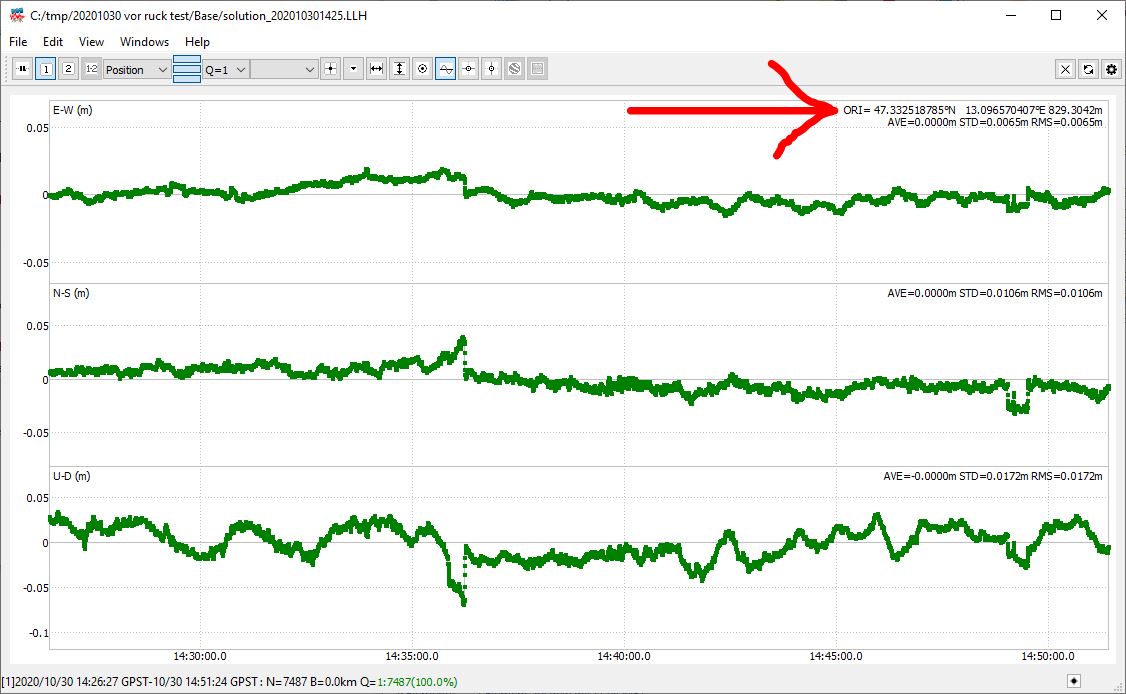
I usually open the base solution (LLH) file in RTKPLOT, cut off the beginning before RTK FIX is achieved and read the coordinates from to top right corner. Is this the proper way to do it?
Process the base first up against CORS, or the saved corrections from an NTRIP, if you have access to one.
Then use the resulting position when you process your UAV flight
1 Like
Hi David,
There are two ways of determining the coordinates of the base:
- opening the base’s position log in RTKPLOT and checking the coordinate origin (ORI) calculated during Fix as you’ve mentioned
- post-processing the raw data log from the Reach base and the NTRIP servers. Then checking the coordinates in the solution file using RTKPLOT
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.