



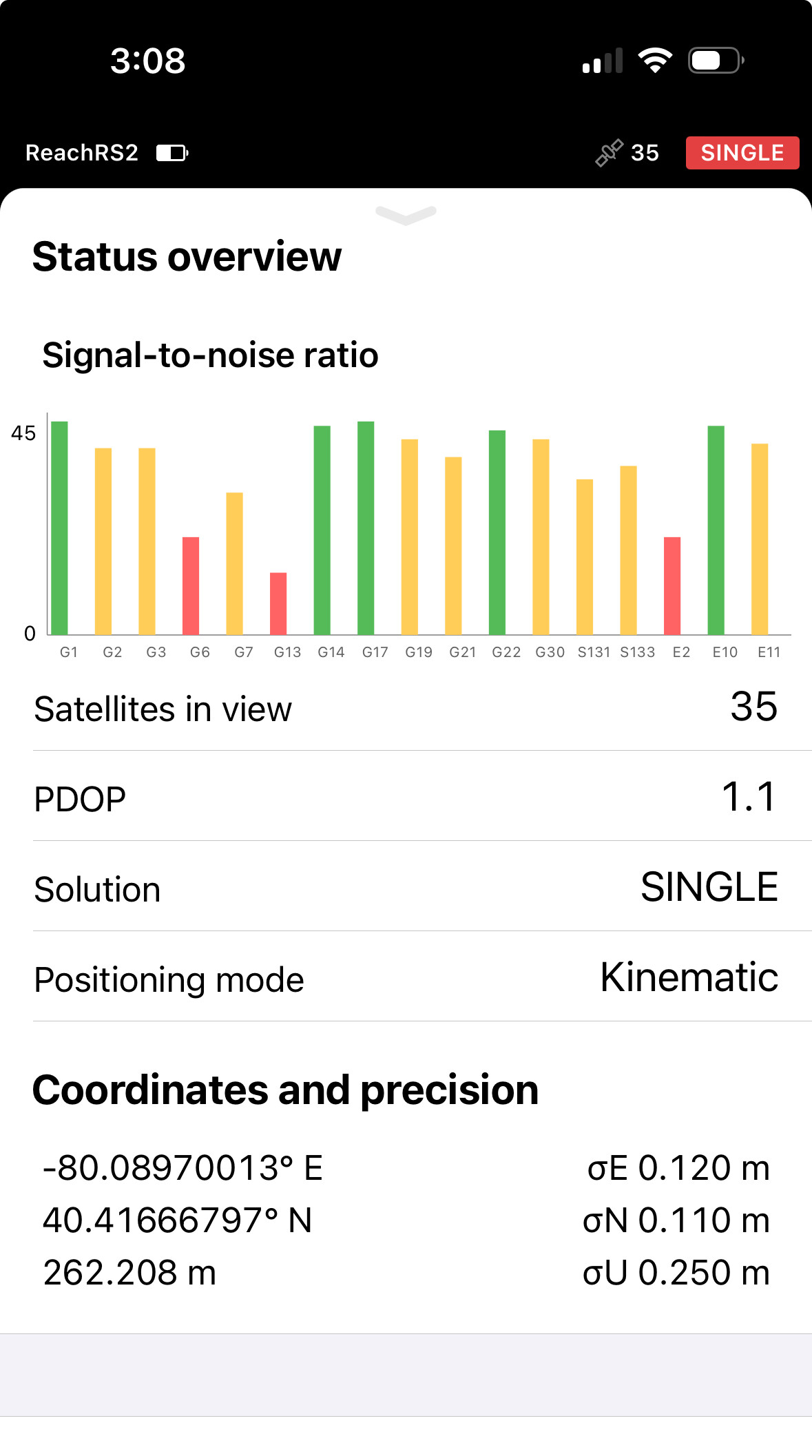
I set up RS2+ as a base with manual coordinates I entered. The vertical height is 260.391 with an antenna height of 5.461 feet. However when I look at the real time data under status overview the real time data varies as much as 2.5 meters with an observed high number of 262.3 meters. I know the data should fluxuate but I would expect maybe by 1/2 a foot. The E and N coordinates vary very small as expected but vertical is all over the place. Can anyone help?
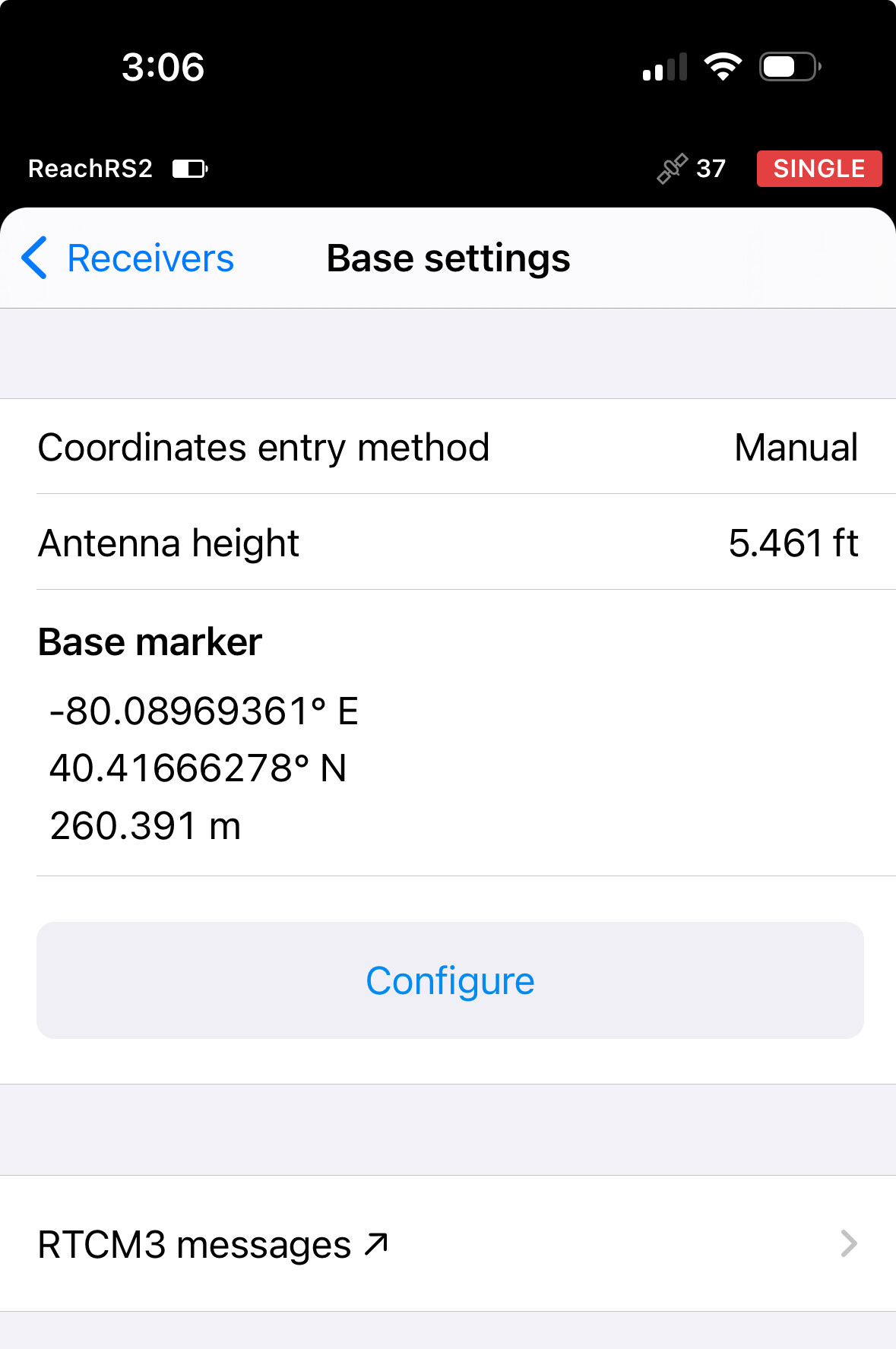
When configuring the base, you’re effectively entering in the known ground position plus the pole height. Reach then uses this information to then propagate the antenna height as the base information for the rover.
In this case, 260.391+1.665+ARP=262.190
The ARP is 0.134m.
What I don’t know however is why there is an 18mm difference, so perhaps a slightly different value is entered somewhere or something else is going on?
Joel
1 Like
If the antenna height is 0.134 meters that still doesn’t explain the 2.5 meter swing in real time. It goes between 260.1 meters up to 262.4 meters live real time.
Hey Dave.
The coordinate you set in the base settings is used when you are using the RS2+ as a base in a base/rover configuration.
The coordinate you see in the live status is where the RS2+ thinks it is based upon the current configuration. In your case, in a single, no corrections received, mode. If you were receiving good corrections and had a fixed solution, I would expect you would see a much tighter coordinate in the live status. In a single configuration, the location is always going to move around a bit whether or not you have input known coordinates in your base settings.
2 Likes
I am trying to use the Rs2+ as the base with a drone as a rover with the Base over a known point using Emlid Caster to the Drone. If the 6-10 foot variance of what I am seeing live is going out to the drone that’s a huge problem. The base can’t send the drone (+)(-) 6 to 8 feet variance and expect good reliable/consistent data. Trimbal devices don’t do this. Height elevation has to be as tight as N/E coordinates. Can anyone help?
Dave. That is not how the system works. The coordinate you see in the live status is not what the rover is using in it’s RTK corrections. It is simply where the GNSS receiver thinks it is based upon the data it is receiving from satellites (in a Single config.).
If you set up your manual base coordinates correctly, and the coordinates are accurate, then you are good to go sending RTK corrections to your drone. The status coordinate is used by the system to calculate the corrections. It is not used as the base’s position.
Hello Dave
I’m still not understanding how this works. When I setup the base coordinates manually why is there such a huge swing on the Elevation and not even two hundredth of a foot variance on N/E?
Think of the RS2+ as a receiver and a transmitter. The live status coordinate is what the RS is determining as a receiver. Your base setting is what is used to generate corrections when it transmits to the rover.
If you are using the RS2+ as a rover, and receiving corrections, then it is a receiver. And if you are set up on your known coordinate, you should expect high precision to your known coordinate. And if you don’t, then something is off.
But, in your case, you’re RS is not receiving corrections, and is in Single mode. So variation is expected in the live status. That does not mean your rover is going to inherit that fluctuation.
In fact, it is that fluctuation that the RTK system is working to remove. That is the point!
1 Like
Hello Dave
Thanks again for the followup and replies. I completely understand what you are saying but it seems to be me that the RS2+ as a receiver should not receive huge variances swings of 2.5 meters in height especially when N/E variances are less than a tenth of a foot?
I think you have a basic misunderstanding, in simple terms your RS2+ base is not correcting anything.
Your RS2+ is simply reporting two things to your rover:
- It is regurgitating the manual coordinates you gave it. It has no idea if they are correct or not, it’s very trusting and just sends them.
- It reports all the signals it sees, good, bad or indifferent, as they arrive all distorted and messed up though the atmosphere. It has no idea if they are good or not as it’s not receiving any corrections itself. It’s simply telling your rover what is sees. It’s not doing anything else with them other than calculating and displaying whatever rubbery position they result in no different to what any other uncorrected device would. Thats what you are seeing, and yes, they will wander all over the place and vertical errors will always be larger than horizontal.
The real action is happening at the other end, it’s the rover that’s doing the corrections. It’s using those two bits of information from the base to calculate the offsets, and apply those offsets to the same signals it’s also seeing to correct it’s own position and record it.
1 Like
I would have to disagree with you. When you setup the base over a known point that is the corrected GEO location that should go to the drone. The drone is not doing any corrections.
Strongly suggest you do some reading on at least the basics of RTCM, and here’s the big clue, in particular look very closely at the 1005/6 ARP message. It is not corrected and never has been.
1 Like
Like both Dave Pitman and Wombo have said, your Base is broadcasting the known manual point to the Drone’s Rover and that is what the Rover is using to calculate a RTK position. Just like using a separate Emlid Base receiver is when using a manual point sending info to the Emlid Rover receiver for it to do a RTK position.
Using an uncorrected Base, you would see these normal fluctuations using Single mode, especially in the vertical but that is not what is being broadcasted to your Rover using a manual point. Otherwise, for example, I wouldn’t be able to disconnect from my RTN corrections over NTRIP to my Base after taking a 5-minute averaged Fix. It is using that last corrected fix as my Base point to send that info to the Rover on my Drone to get an RTK fix for the Drone’s position.
Also, how tight are your horizontal/vertical residuals on your check points in your photogrammetry software using a manual Base point?
1 Like
Hi @dave1
Sorry for the silence!
If the base coordinate you put manually is accurate, you don’t need to worry about broadcasting it to your rover.
Your base broadcasts two types of data:
- The base position
- The base raw observation data.
Both are sent to the rover, where calculations occur, as @Wombo mentioned.
When you set your base in Single, the elevation swing is expected, as @dpitman mentioned. The base station recalculates its meter-level accurate position with the chosen update rate, and you can see it in the Status overview. But it still sends the accurate position from the Base settings to the rover.
2 Likes