Hi There,
I just bought a new RS2 survey Kit to be used for collecting Ground Control Point for a drone survey. I have read throug the posting in this community, and try understand few things regariding the connextion brtween base and rover :
How can the Base send the correction to a rover in a very remote area where there is no internet connection whatsoever.
Can anyone show me the walkthrough how to make correction from base to rover via Lora radio over 8 Km apart, as shown in RS2 lora antenna description. What other tools (beside Rs kit) that I need in order to send such long range (3-8 km) distance between Rover and Base.
Can anyone share the walk through how to send the correction from base to rover by TCP connection for RS2?
In a remote area, you can use LoRa radio to establish RTK-link between base and rover. Such a setup doesn’t require an Internet connection. So, all you need is to provide receivers with a clear sky view and line of sight between two units.
Reach LoRa radio should work fine on up to 8 km baseline. No additional gear is required, only the line of sight To find more information, you can check out our step-by-step guide.
To connect two devices over TCP, you need to connect them on the same Wi-Fi network. TCP uses a client/server model, so firstly, you need to specify the port for the base (server). Then your rover (client) will connect to this device on its IP address.
Please note that a stable TCP connection is dependent on the Wi-Fi range. This guide in our docs might be useful for you.
Curious. Can you upload some photos of the environment between the BASE and ROVER that were 3-8 km apart using LoRa? Or maybe even coordinates of the area to view on Google Earth etc? Were there drastic terrain height differences and vegetation? Or just flat wide open areas?
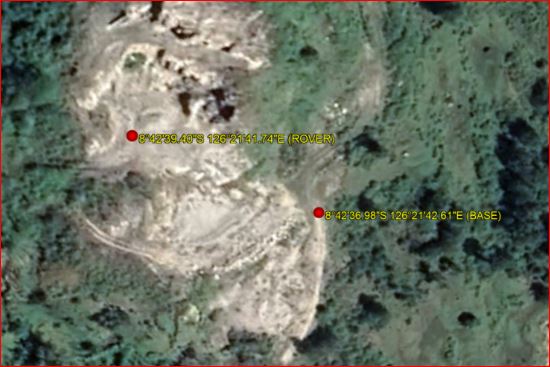
I had the survey in a remote area in my country, there is no internet connection, and the distance between Base and Rover was around 100 meter a part. You can check out the coordinates on google earth on 8 42 36.98 S 126 21 42.61 E (Base) and 8 42 39.40 S 126 21 41.74 E (Rover).
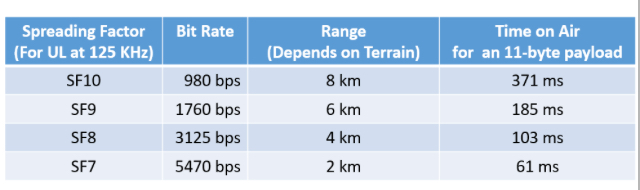
So if you really need to maximize range you need to pair down the messages from the base to a minimum and use the smallest data rate possible.
Emlid, if you had the opportunity to create a guide table like above specific to the emlid Lora modules and data rates it would really help the community.
Another feature that would be fantastic, but possibly complicated to implement, would be for the rover to be able to change the bases broadcast RTCM messages and Lora data rate from a distance over Lora back to the base.
Practical example where this would be helpful: I work in a mountainous region with variable overhead cover. I generally set the base up with maximum constellations and correction messages to maximize my chance of getting a fix under the circumstances. Sometimes I find myself at the edge of the Lora range at the high data rate and would love to be able to change the base’s Lora broadcast settings to reduce the messages and try to get more range. But because the satellite constellations are always changing as well as my sky view, it would be trial and error to figure out which combination of minimal constellations and messages would work best. But since I’m already 1km away from the base, it’s not possible to hike back and forth for trial and error. Right now, I have to set a new base BM and relocate it closer.
An alternative and additional great feature would be a live sky view status page in RV3 that shows the sky view chart where the icons are colored by the SNR and which signals are received (L1/L2/Both) and ability to turn constellations on or off from the view. This would help remove the trial and error component and just be a great feature in general to check live status. I know there are apps that can show you the current constellation configuration, but they don’t get live signal information from the RS2.