



Hi, everyone!
I currently have no problem flying the aircraft on stabilize mode. However, when using a flight mode that requires height control (ie Alt Hold or Loiter) I notice my vehicle takes off, acts for a few seconds as it is supposed to, and then starts to slowly go down, forcing me to keep increasing the throttle stick.
When reading my flight log, I noticed the barometer height readings are always increasing during the log time. Which doesn’t make sense, given that during the log I landed and took off several times.
Since the height readings from the baro keep increasing, it makes sense that the height controller would try to compesate it by decreasing the drone’s height:

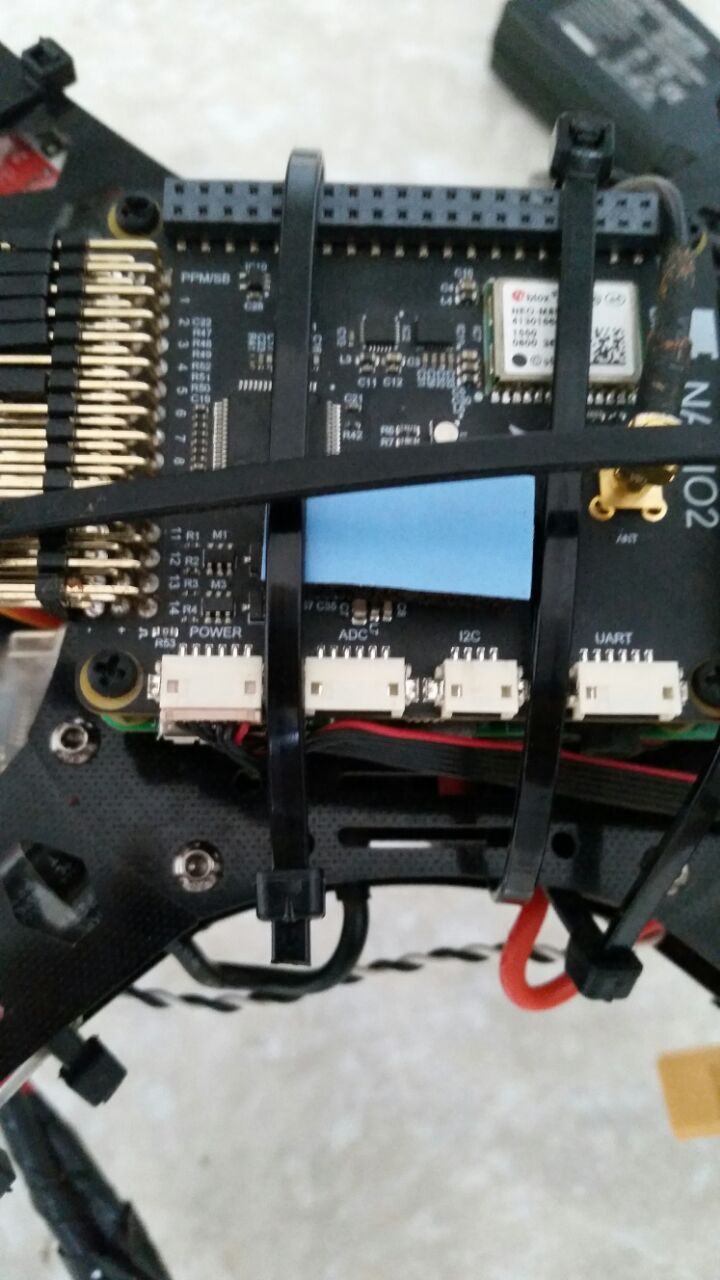
I already have my baro covered by a protective foam:
How do I fix my baro readings?
Also, I have a general purpose serial sonar at home:
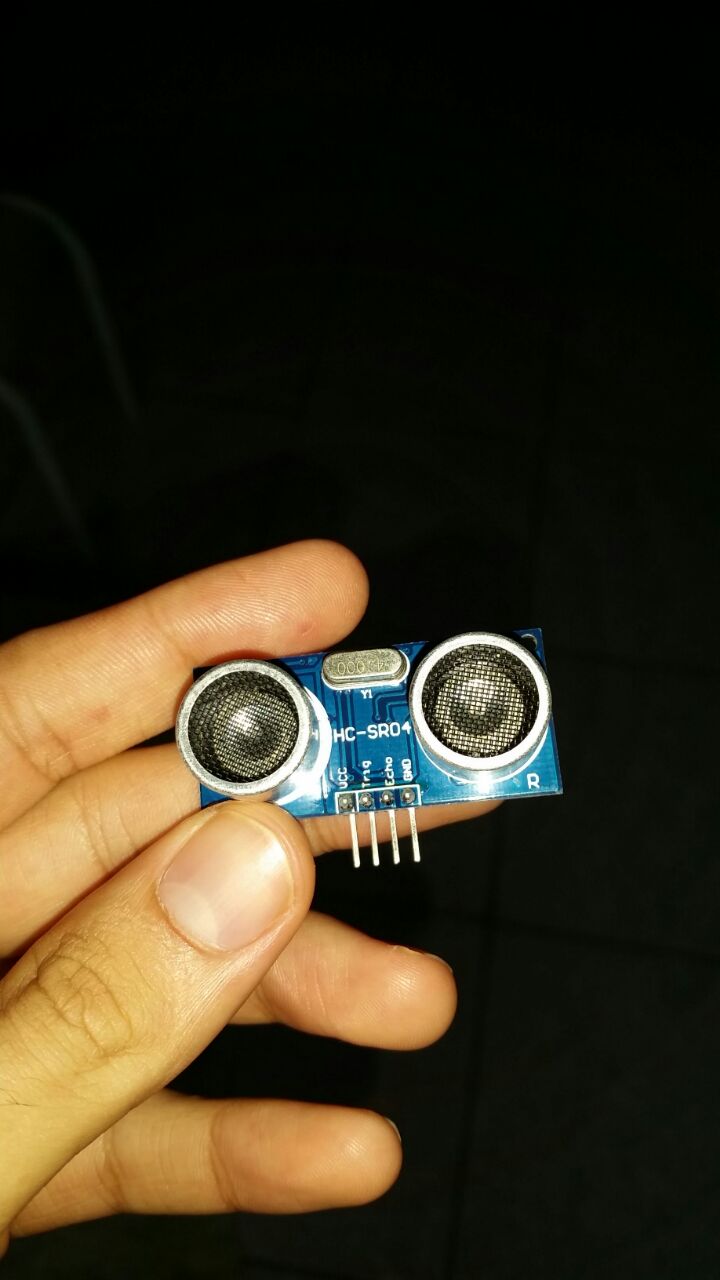
How simple is it to add it to the system and replace the height acquired values from the barometer to the sonar?
Thanks!