Hello everyone,
Last month I brought an Emlid Reach module to improve the positioning accuracy and precision of a rover. The module will be used to locate a buoy which has attached an acoustic device (USBL) which provides with the relative position between the buoy and an acoustic modem located in an AUV. In such a way that having a geolocalize buoy I am able to geolocalize the AUV.
TEST 1
I have start testing the module with the following config, fixed in an static location.
Positioning mode: Kinematic
Systems: gps, sbas, glo, gal
Dynamics model: off
Input source for base corrections: off
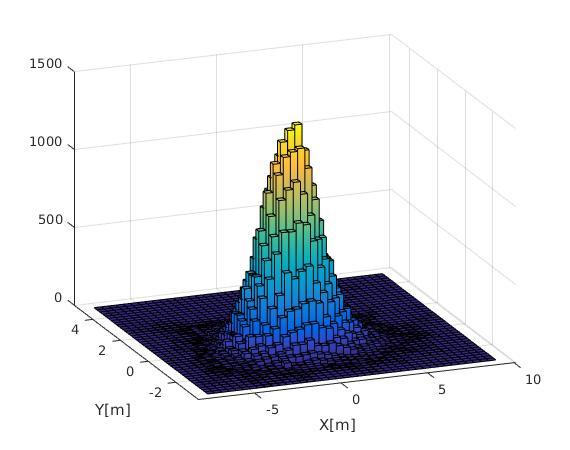
For this first test the module was fixed in a roof with really good visibility, for a period of 30hours at 1Hz.
Next figure show the obtained measurements in meters. With this first config I obtained a positioning error standard deviation of approximately 1m.
TEST 2
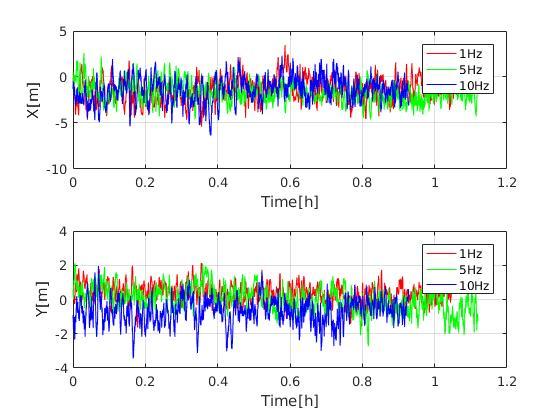
In order to look for a better an improved performance I have tried the same configuration in periods of one hour for 1Hz, 5Hz and 10Hz.
Positioning mode: Kinematic
Systems: gps, sbas, glo, gal
Dynamics model: off
Input source for base corrections: off
It seems that the precision it is not related to the measurement frequency.
TEST 3
For this test I have used ntrip corrections.
Positioning mode: Kinematic
Systems: gps, sbas, glo, gal
Dynamics model: off
Input source for base corrections: ntripcli
www.euref-ip.net
80
MALL0
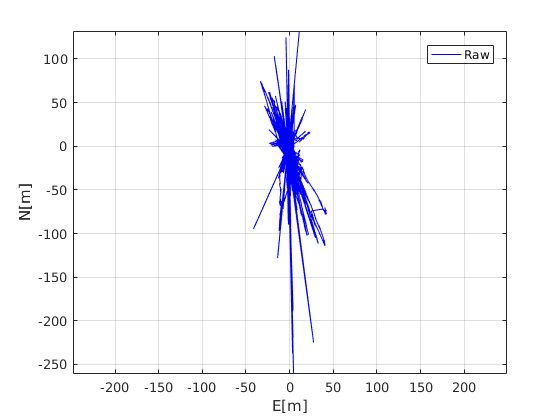
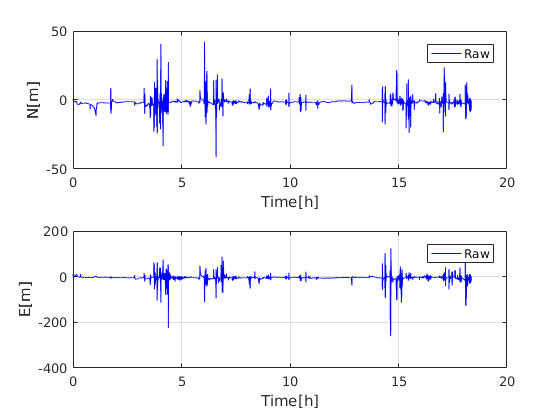
The estimations seem to be very accurate. However, as shown in next picture, at some moments it produces some bad measurements and then takes a long time to converge. Resulting in an standard deviation of 4m.
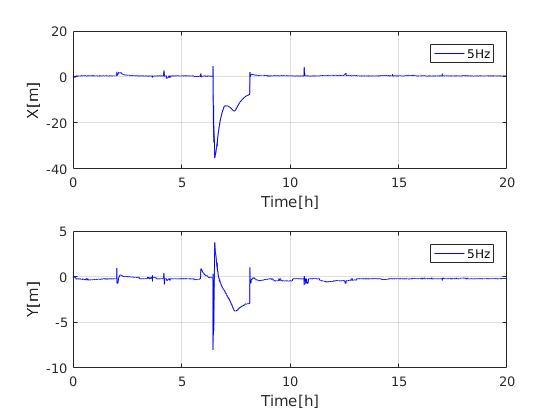
I would like to ask you if anyone have had this problem in order to share possible solutions.
Thanks!,
Eric Guerrero
Reach image version: v1.2
ReachView version: v0.4.9