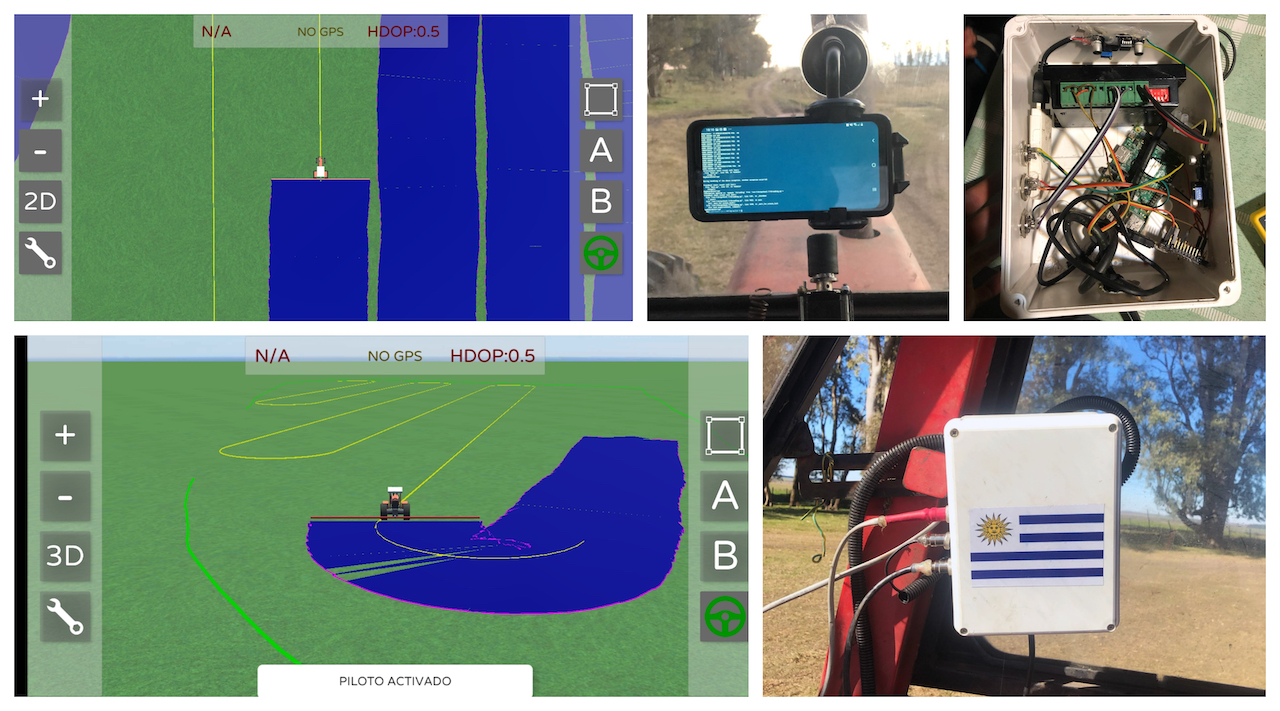
Hi everyone, I am an advanced agricultural engineer student from Uruguay, also analyst programmer student. After working for years with gps guidance systems in AgroTrack (Co-Founder) this time I will share with the community an autopilot system I designed for tractors.
It features:
Navigation path creation
Automatic turns
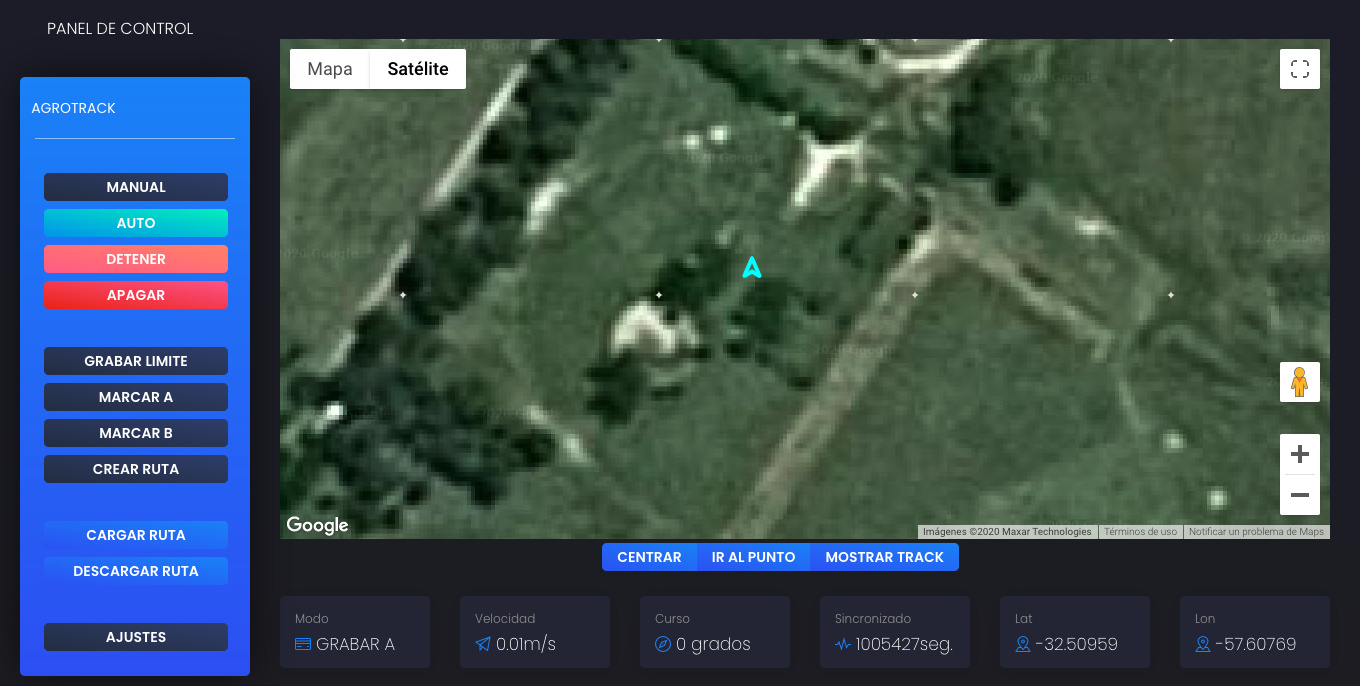
Firebase integration, including a half coded dashboard, for realtime watching AND DRIVE!
PID customizable
OpenSource Python!
You will need:
Reach with solution output in TCP
Raspberry PI and Arduino nano
LTE modem+router
Nema23 motor with controller (can be dc motor if you code for it)
A potentiometer for steering angle measure (I used a servomotor with the case removing the pcb.)
I am very into AgOpenGPS, I am building hardware to test it right now.
I think its time farmers took control of there machines again.
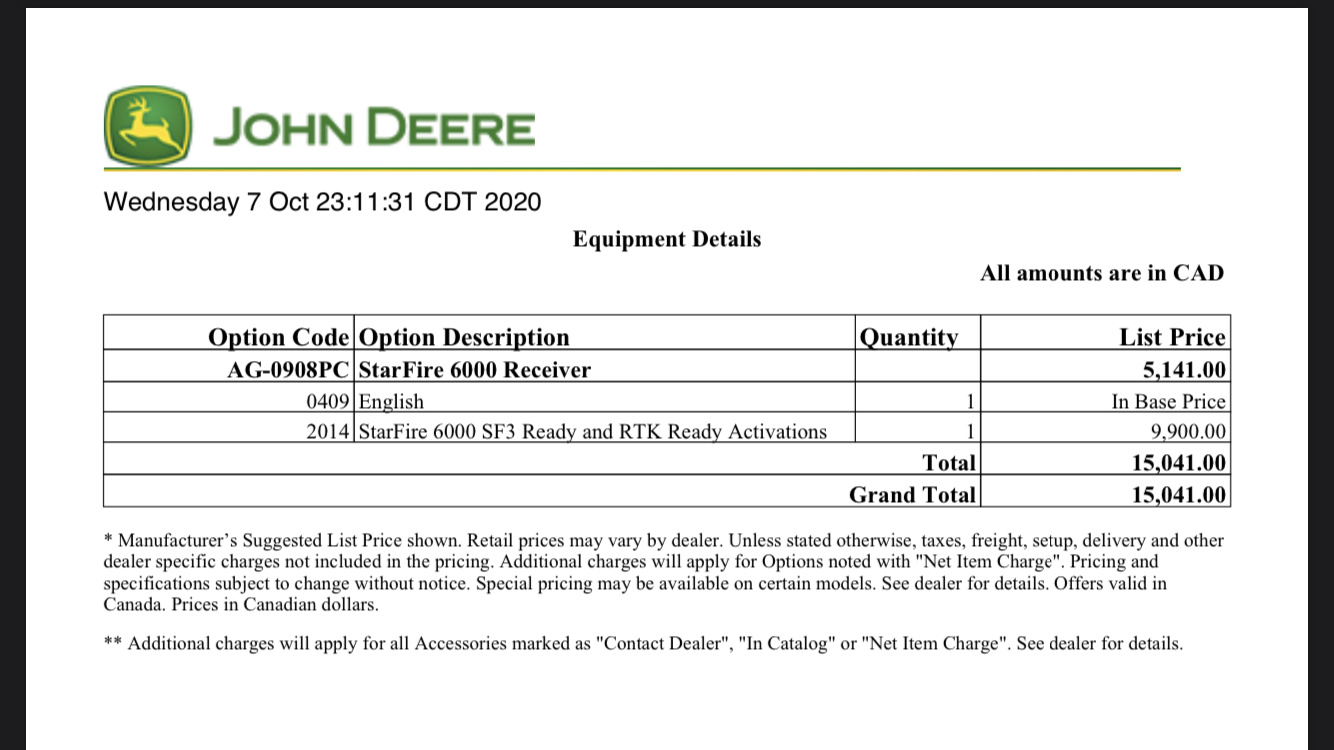
I priced out a new RTK system no screen, no cables, no guidance, no ability to fix it, or cross integrate it. What an affordable option! Does not even have a basestation!
Hi everyone, thanks for your messages, actually before start coding checked some repos on github but unfortunately didn’t meet agopengps, yesterday tested it, (we are thousands of kilometers away but randomly designed them really similar, including my nano with potentiometer (WAS), was so easy to migrate!) and worked like a charm! I think there is no time to reinvent the wheel so I will leave my pride of authorship and hope to contribute to your project @Andreas_Ortner! I also messaged Brian in the morning, great work!
Hi, is this a completely open source project or do I need to buy something? On github, I did not find ino files for arduino and there is no connection diagram anywhere. I use AgOpenGPS but would love to try your project