I’m trying to set up my raspberry PI following the instructions present in Navio2 documentation.
Here the steps I achieved:
Downloaded and installed succesfully “emlid-raspbian-20200922.img.xz” image
Set up of wifi connection and log in with putty
SSH into raspberry and typed: sudo emlidtool ardupilot
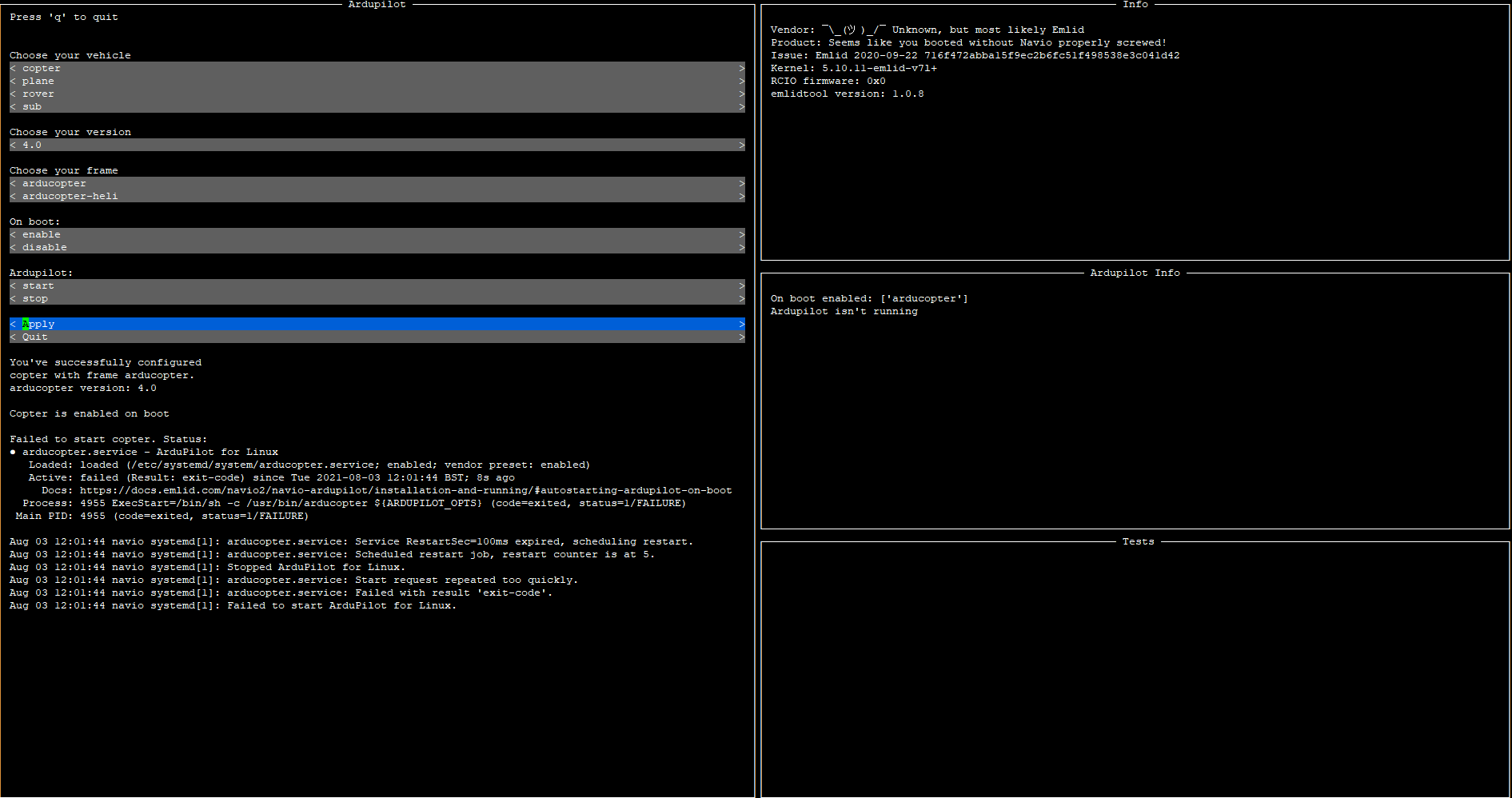
–> Here I selected: vehicle:copter; version:4.0; frame: arducopter; enable on boot and start service.
The problem is that the service does not start (picture below). I also tried to enable manually but the situation did not change.
One other important thing is that I’m only working with rasperry PI connected, and NAVIO2 is not connected at all. Could be this the cause of the issue? I believed that at least the service could be started…
it worked. The service started and now I can also estabilish communication with Mission Planner on windows.
An other think that I want to ask: Ardupilot is saying me that I shall update firmware but as I understood correctly, this operation should be done using UART communication. How can I find the pin-out to attach RX,tx and gnd to my board? And what’s the baudrate?
Do you get this message in Mission Planner? If yes, you can skip it as there should be no issues with using the currently supported versions of firmware by our image.
Nevertheless, you can install newer versions of ArduPilot autopilot by using the instruction in the following guide.
You can check the scheme in the Pinout guide. The default baudrate is 57600.