



Emlid documentation describes how to provide RTK correction using an sik radio modem setup and the Mission Planner GPS injection method. I would like to know if the GPS injection method will also work over other connection types like wifi modules. What is the transfer requirements?
Hi Rory,
In order for us to be able to help you, please, provide more information.
Would you mind specifying what Reach receivers and other hardware you’re working with?
Could you please describe you desired results in more detail?
Polina,
I am using an original Reach RS and a Reach RS module using the GPS “injection” method described in this Emlid Document (ArduPilot Integration | RTK Modules)
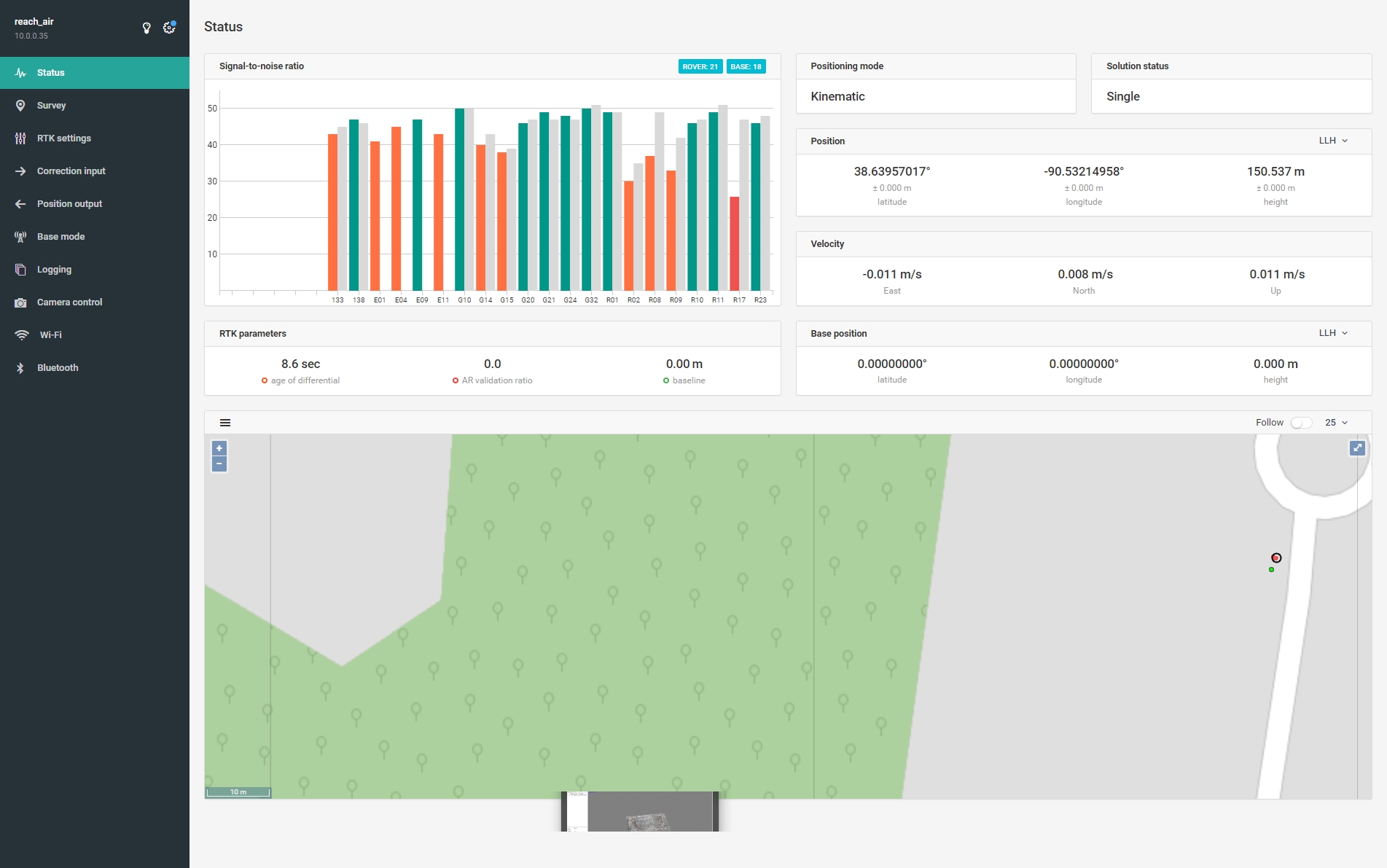
I have a NTRIP correction via wifi on the base station with a “fix” which is then supplying the correction for the rover (drone) which is static for testing. I get a “rtk float” on the rover unit but only an intermittent fix. The units are a about 2m apart. Also I have noted that the correction signal drops intermittently.
The only difference I have in my setup is that I am using a Tallysman 20160120 GPS antenna with a 7.5cm back plane. I have tried Emlid’s stock GPS receiver with the same results.
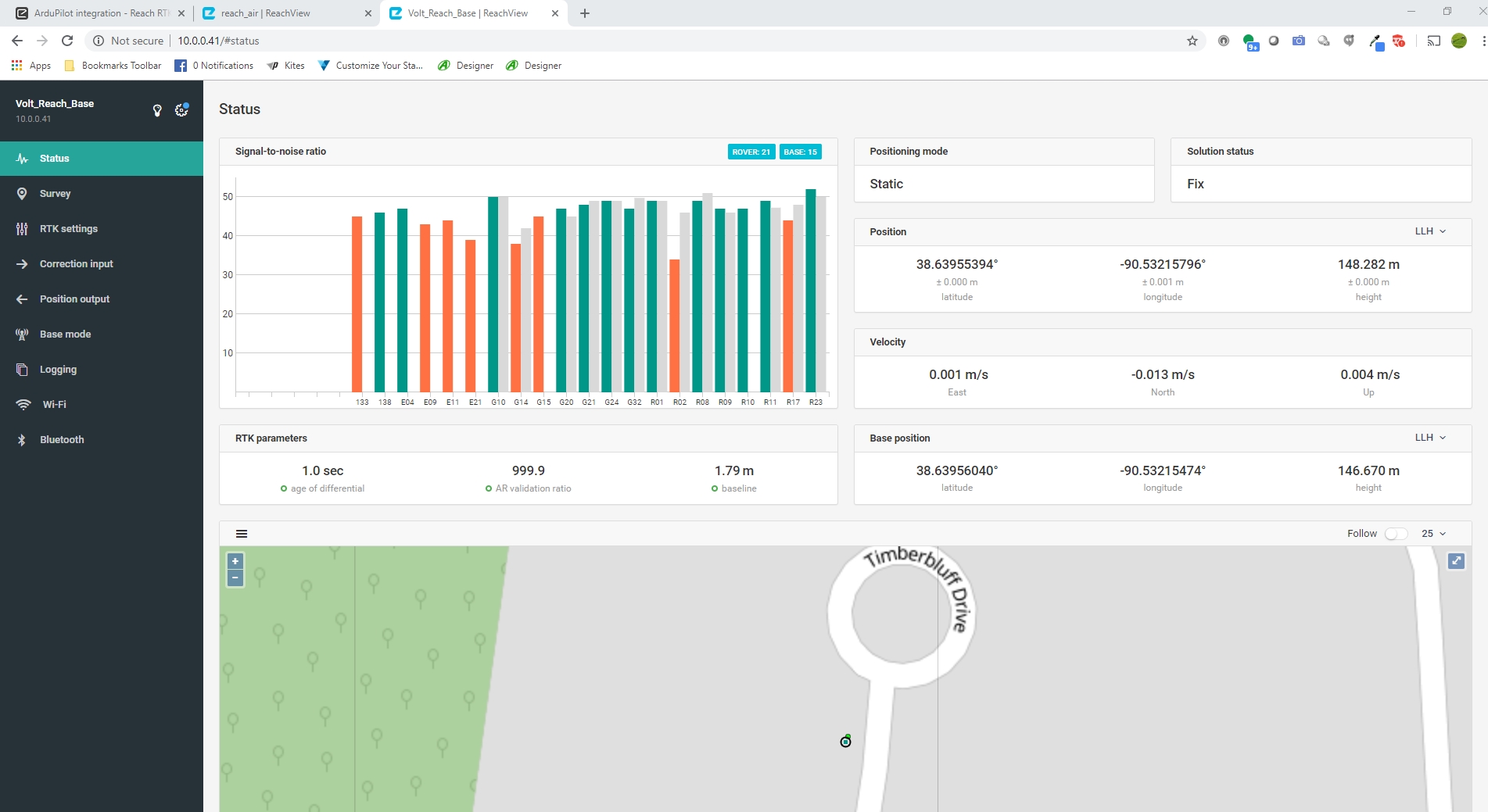
Below are some screen grabs first from the Base and then the Rover (UAV).
If I am unable to get a fix with the Rover (UAV) stationary there is no way this could ever be utilized for precision navigation. I would like to understand were the issue is? Is this a bottleneck with the correction transmission from the base i.e. the connection is too slow? Is this a antenna issue i.e. we need a different GPS antenna and or larger back plane??
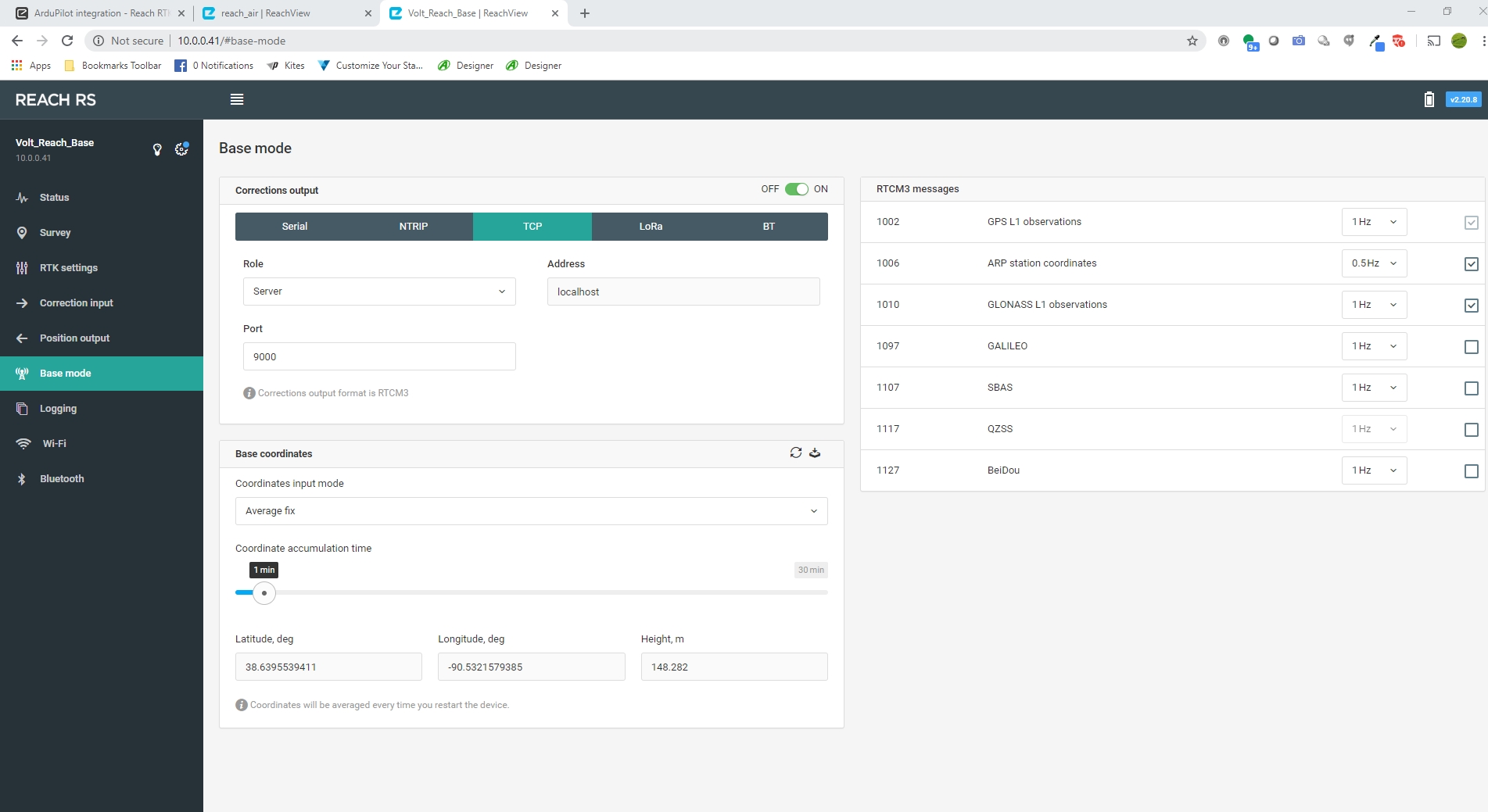
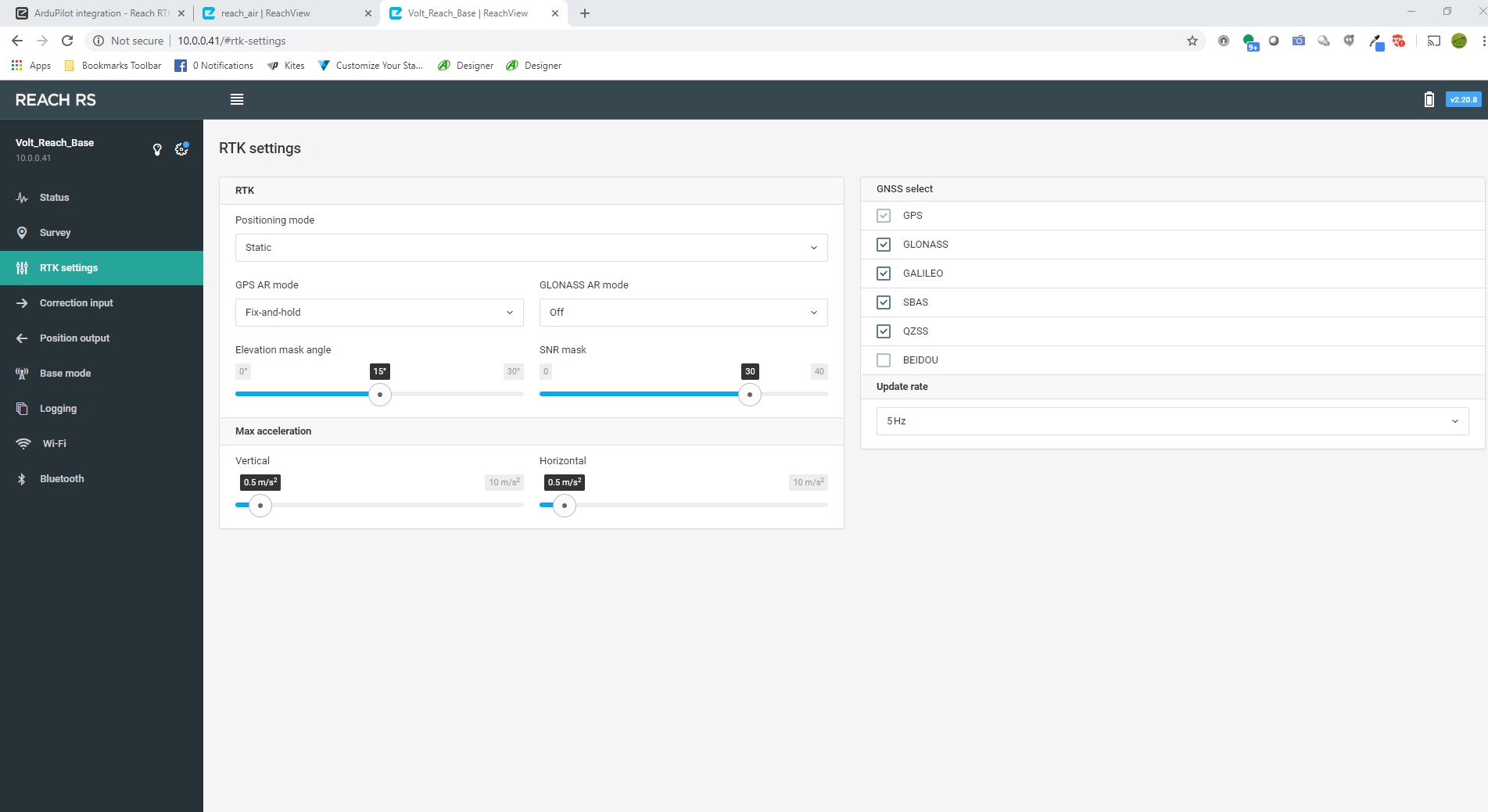
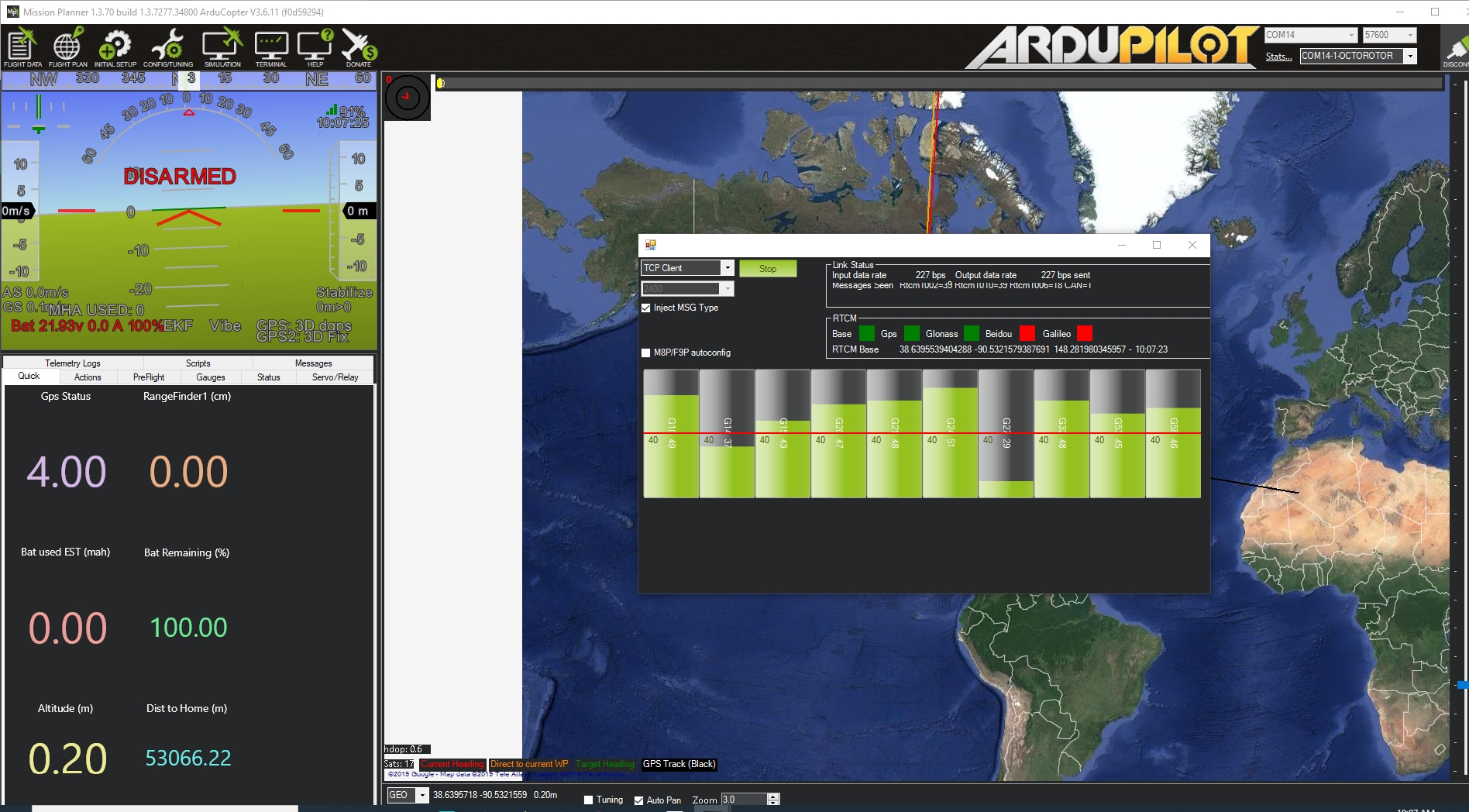
Base
Rover

Mission Planner
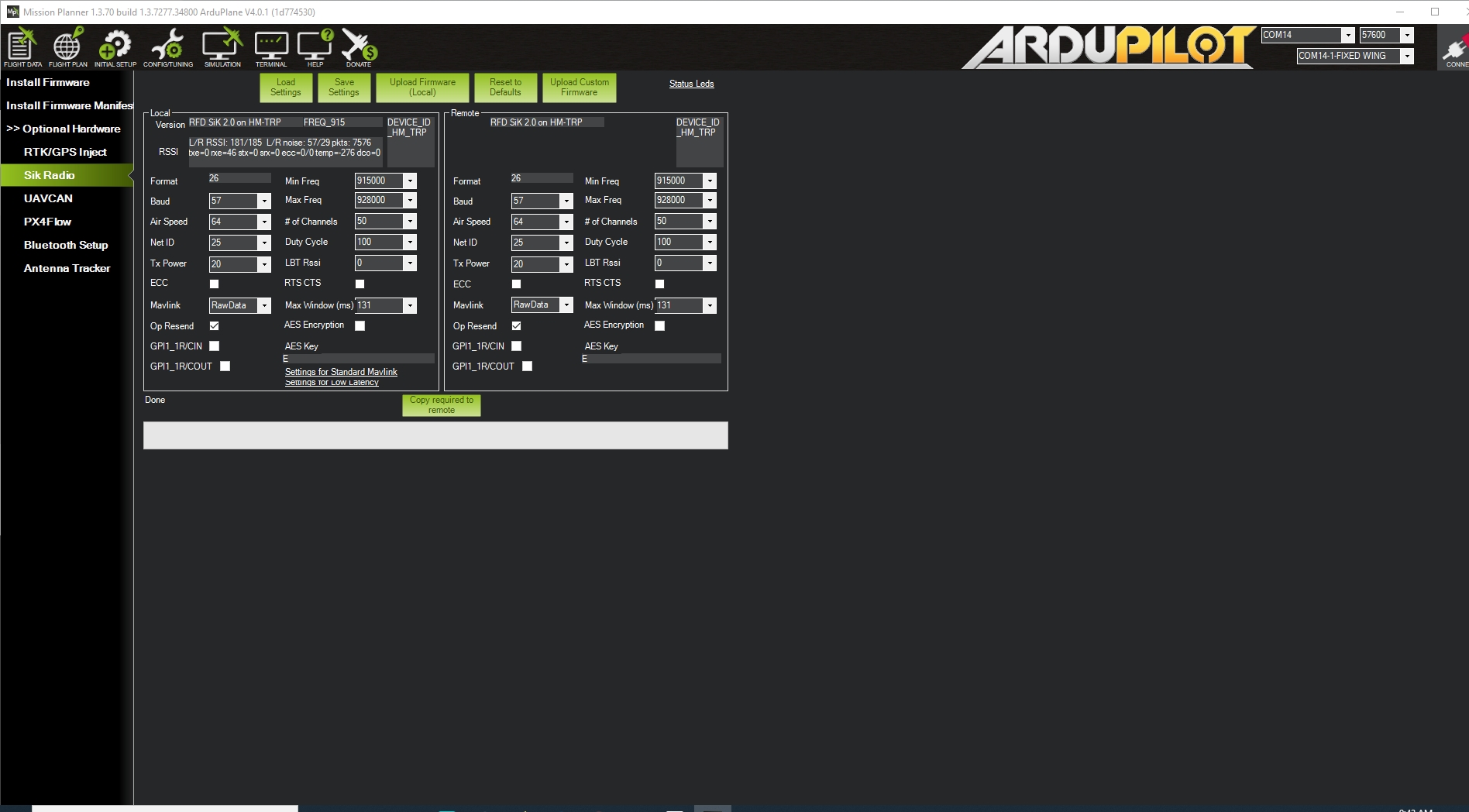
Your RTK configuration differs from the docs!? (I think you have to choose either GLA or GAL). And I think GLAd AR should be activated.
Tobias,
Thanks for the reply.
The screen captures are after multiple attempts with every possible combination of setting from GPS and GLA only (we only get NTRIP data for GPS and GLA) to every possible constellation. We simply cannot maintain a fix on the rover. I have a strong suspicion that the problem is the “GPS Injection” via the Ardupilot which drops data or has latency issues? This is why Emlid introduced a LoRa modem for the M+ ??
Hi Rory,
I use “GPS injektion” with Arducopter and Mission Planner and I do not have problems with it, even when using a very slow telemetry rate and not the RAW mode. I use a 433Mhz radio but I do not think that is the problem since your Mission Planner screen looks just as mine.
What I wonder is that you send corrections for BDU but have not activated it in ReachView. Are you shure that you testen a consistent setup (e.g. only GPS activated in RTK and only the RTCM3 messages 1002 (1 Hz) and 1006 (0.1Hz))?
I don’t know if that applies for youre telemetry too, but I would change the net id and all settings now that you published all youre settings including youre location here. Its very easy to hijack an Arducopter and change all settings so that you can no longer control your copter (while the hijacker flies away with your 5.000$).
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.