I am facing the following issue:
My setup:
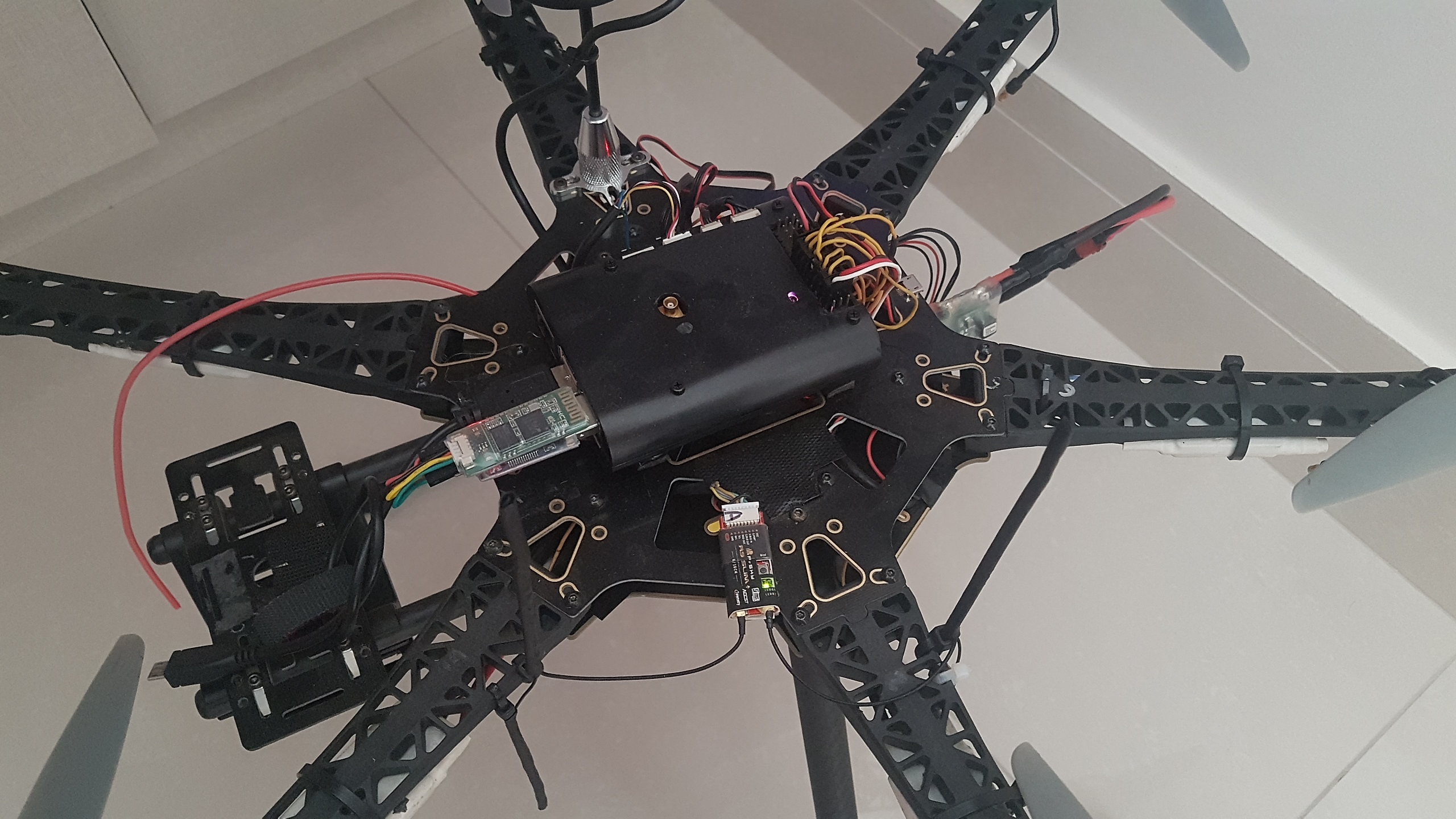
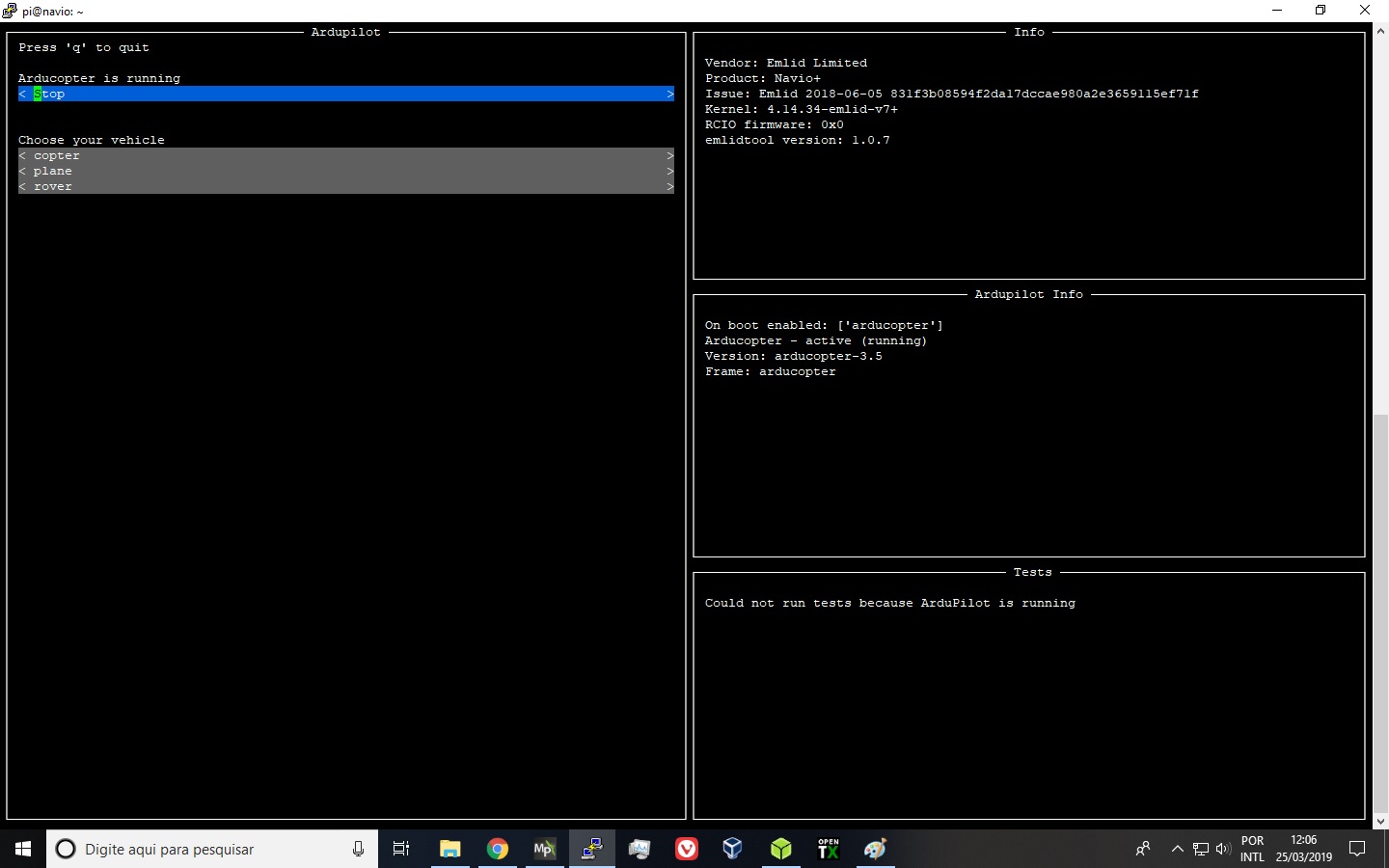
Navio+
Fresh SD 16gb latest EMLID(today)20190227 image arducopter 3.6.5
raspberry 3b
My issues:
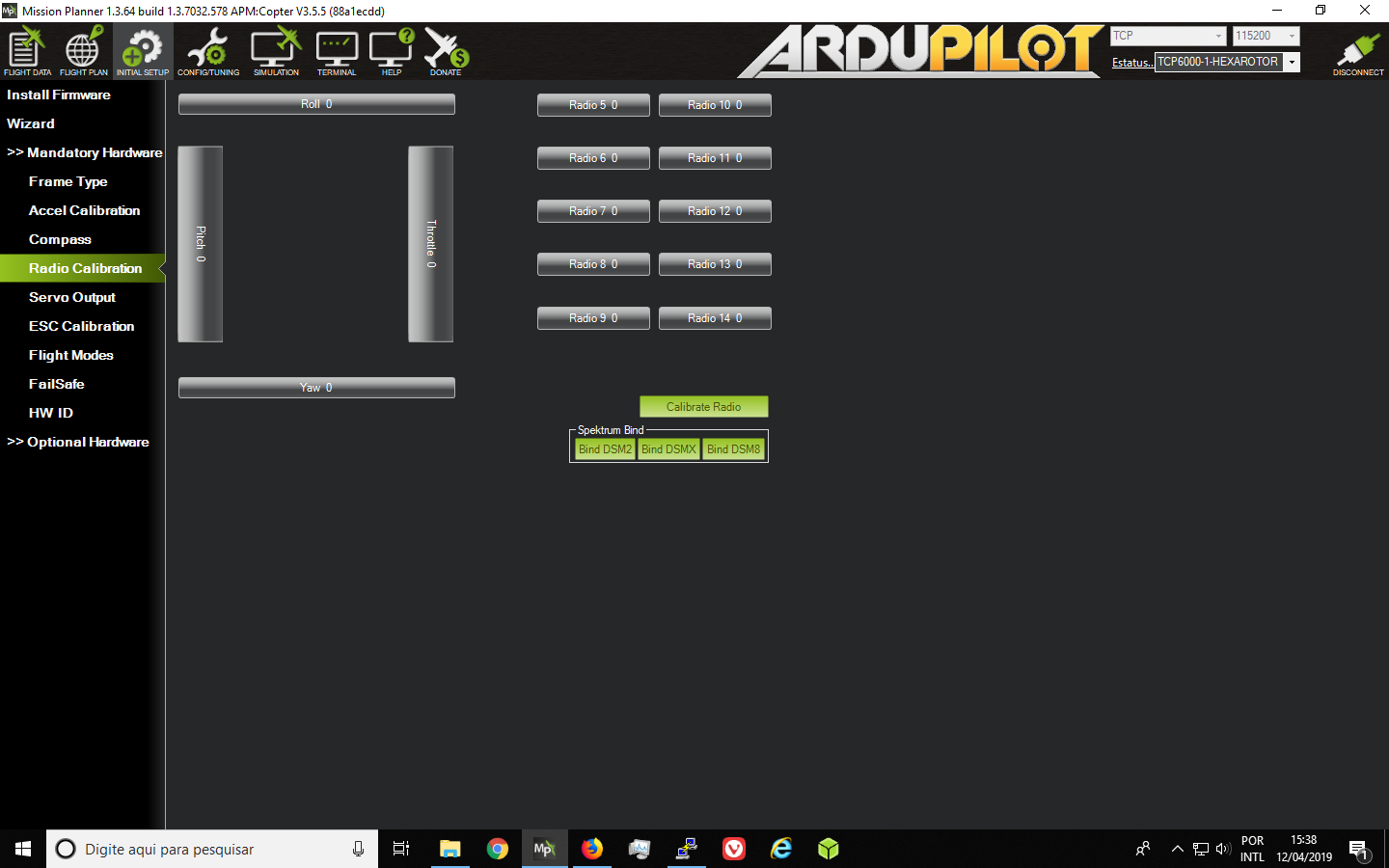
Arducopter start after all config done through emlidtool, wifi and lan connects.
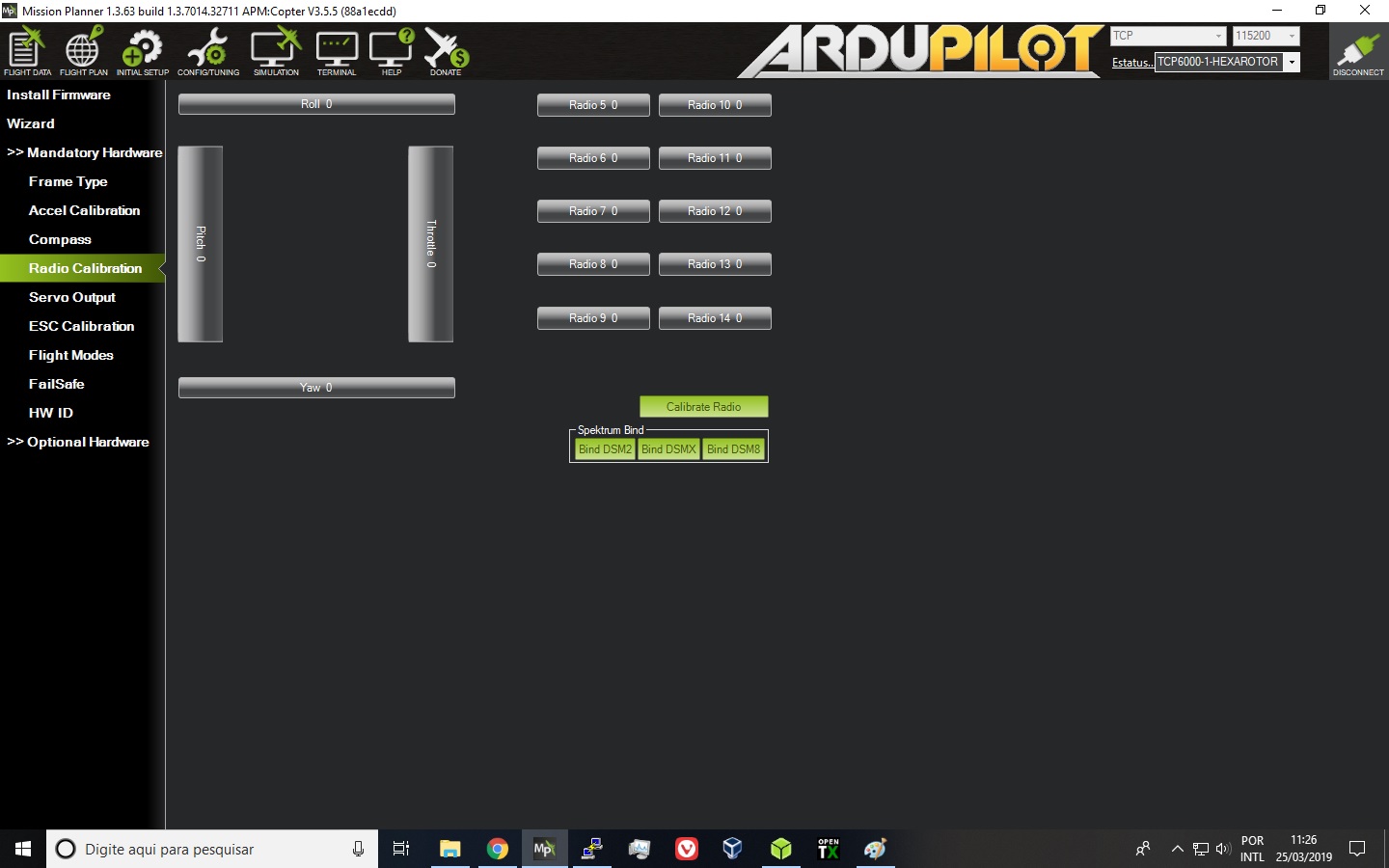
Connects to MP but after 20 sec it disconnects by itself in a loop every 15 sec.
Same setup as before, was working good. Yesterday i did a sudo update and got the same problem as today with a fresh burned image.
Cannot perform any task on MP.
Marc, I just reflashed image 20180525, now it is not restarting but it doesn’t recognize my frsky R9 slim+. This is the same problem long ago during an upgrade, I went back to the previous image and It came back to work but now I can’t figure it out. Any clue? Thanks.
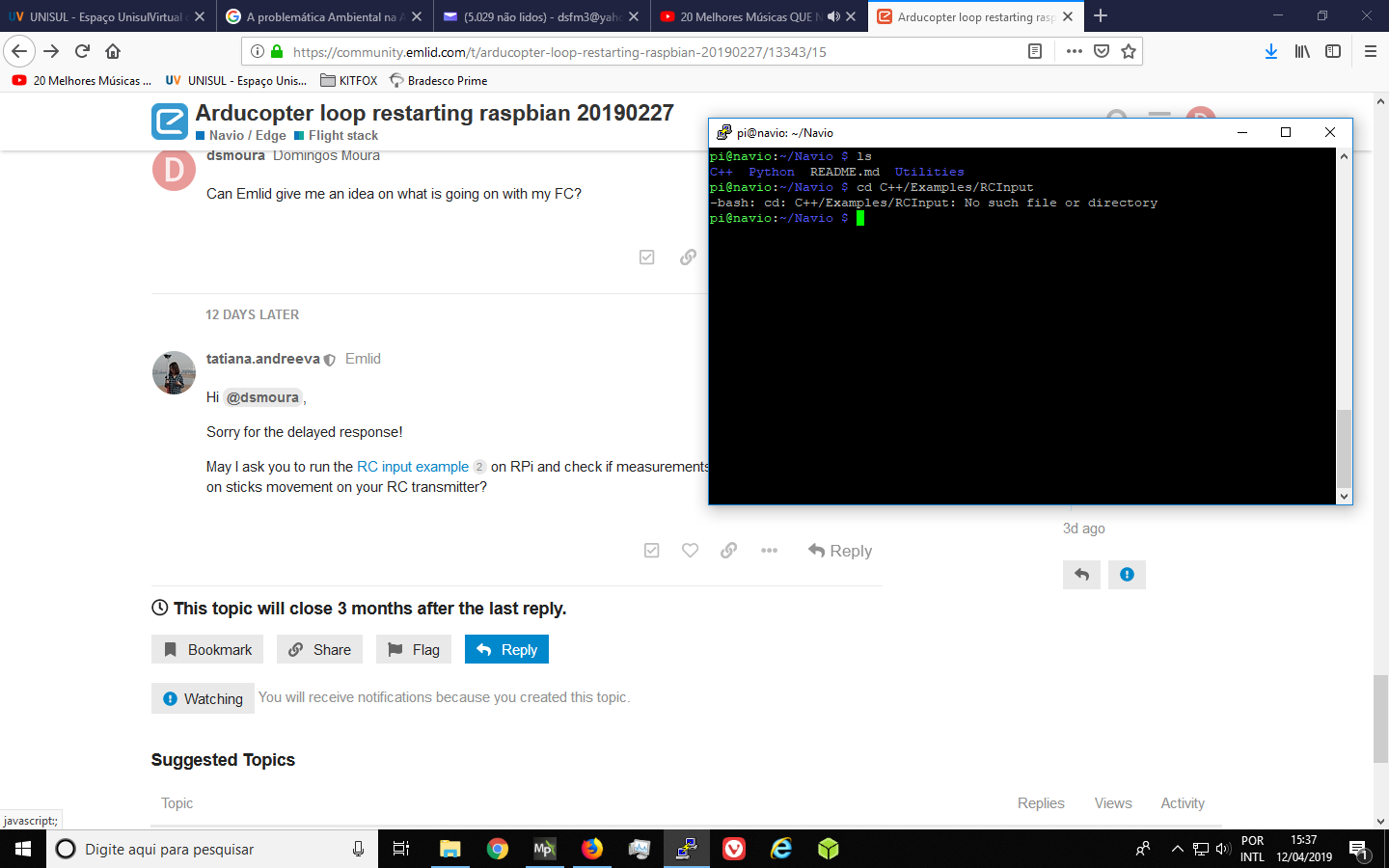
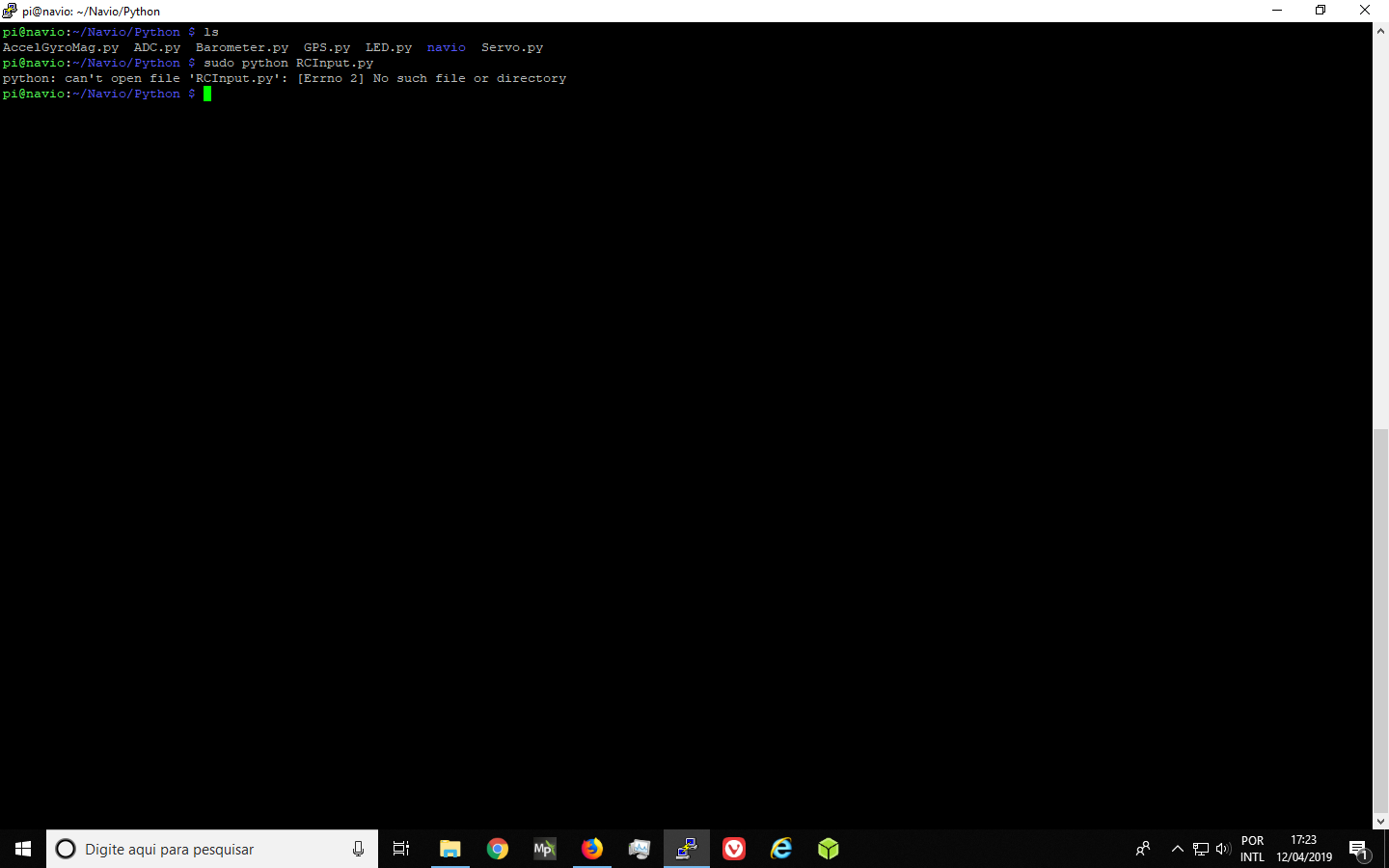
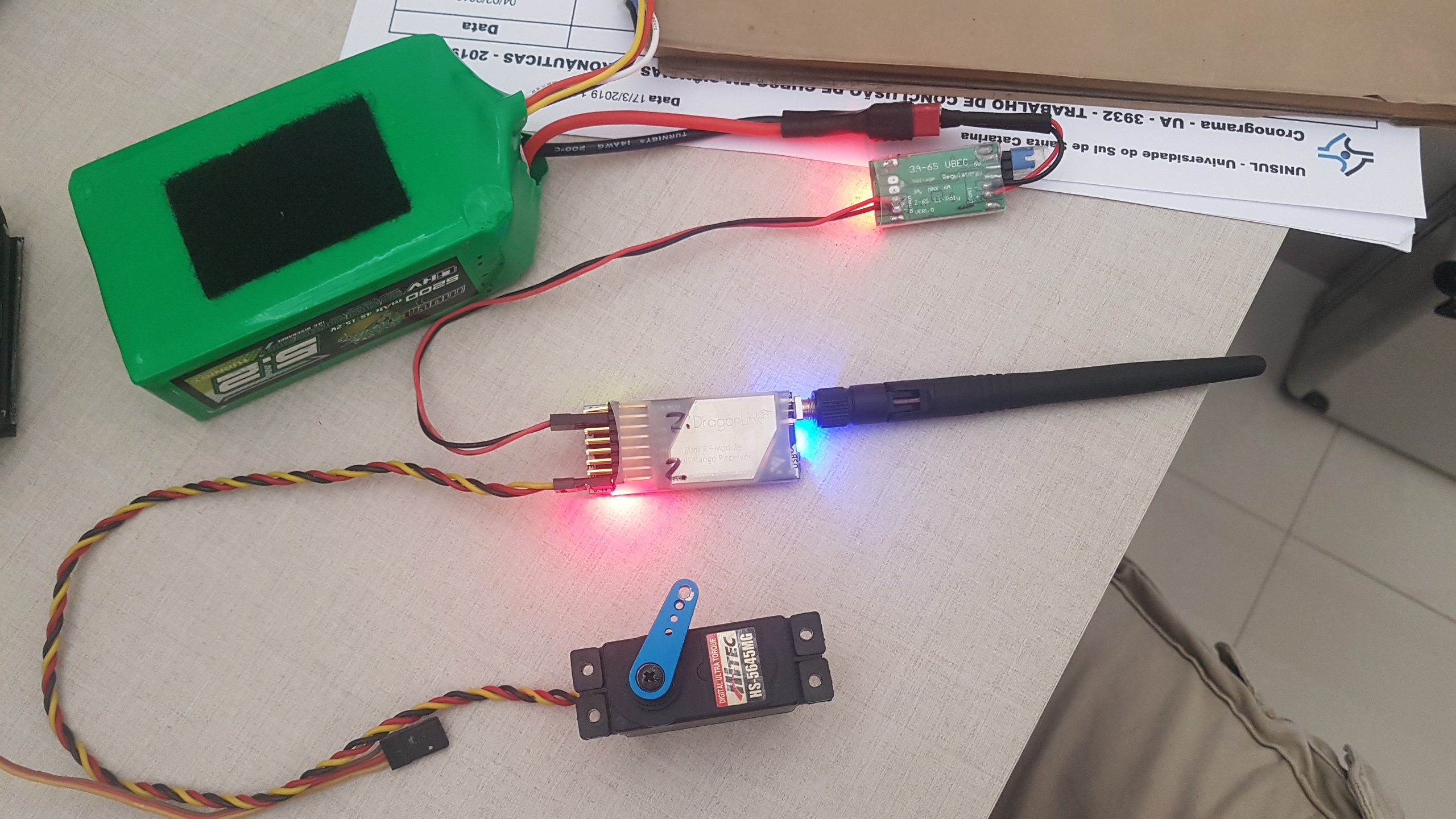
Marc thanks for your reply. R9+slim receiver put out PPM and Sbus through LBT(listen before talk) i might be wrong but this is what i understood, also tried another receiver on PPM. Yes i am using a BEC and it is bound to the TX i have green light. PPM terminal is the one next to channel 1. It is diferent then NAVIO2, pics checked. Same exact wiring and setup was working before i started playing with upgrades.
Please if you see any other issue let me know.