Hello,
I have some issues with getting the I2C Bus working.
I want to use an Arducam PTZ Camera on my Drone (Redirecting...). The camera lens can zoom and focus with servos and therefore this camera comes with a driverboard which can control all functions of the camera. While the camera is a MIPI camera connected to the Raspberry Pi camera connector, the board ist connected via I2C to the Navio2.
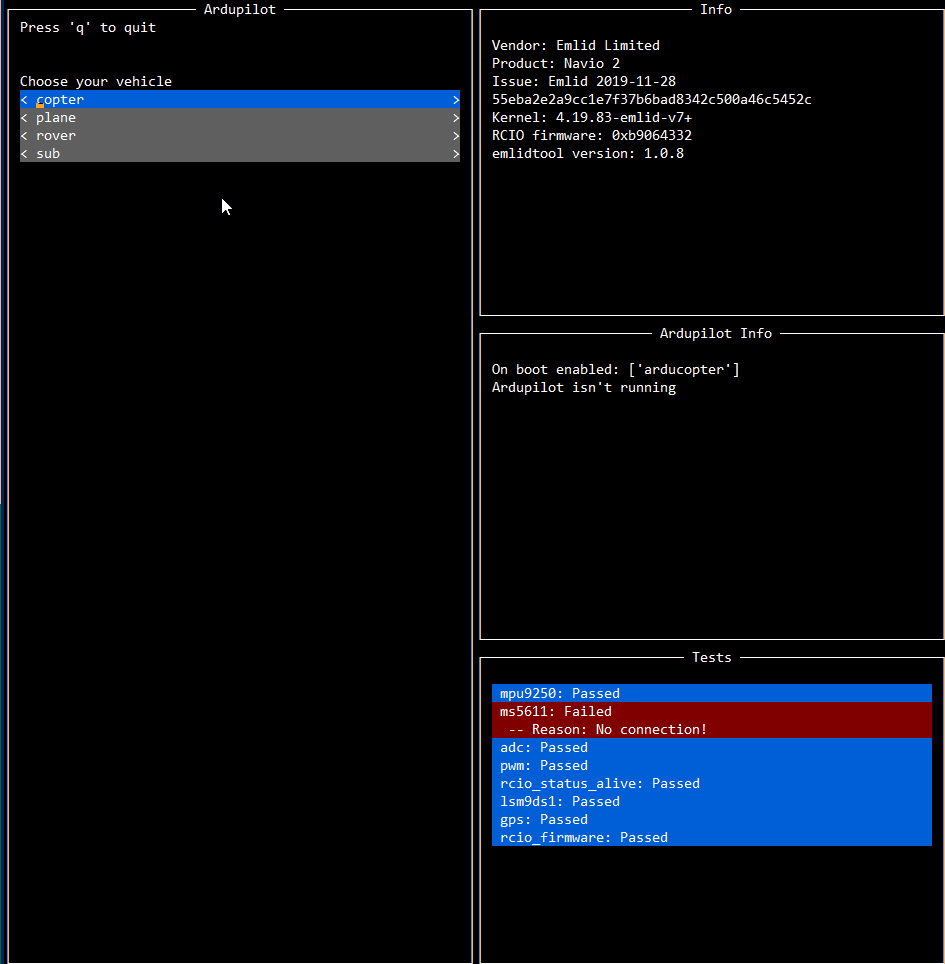
My Plan is to control the camera lens with a software, but the problem is that as soon as i connect the board to the I2C bus of the navio, the barometer loses his connection.
Since I’ve been trying to figure out why, I have read that the barometer is the only sensor that is connected via I2C. But I know that it is possible to have many slaves on one I2C bus so it must be possible to get this working.
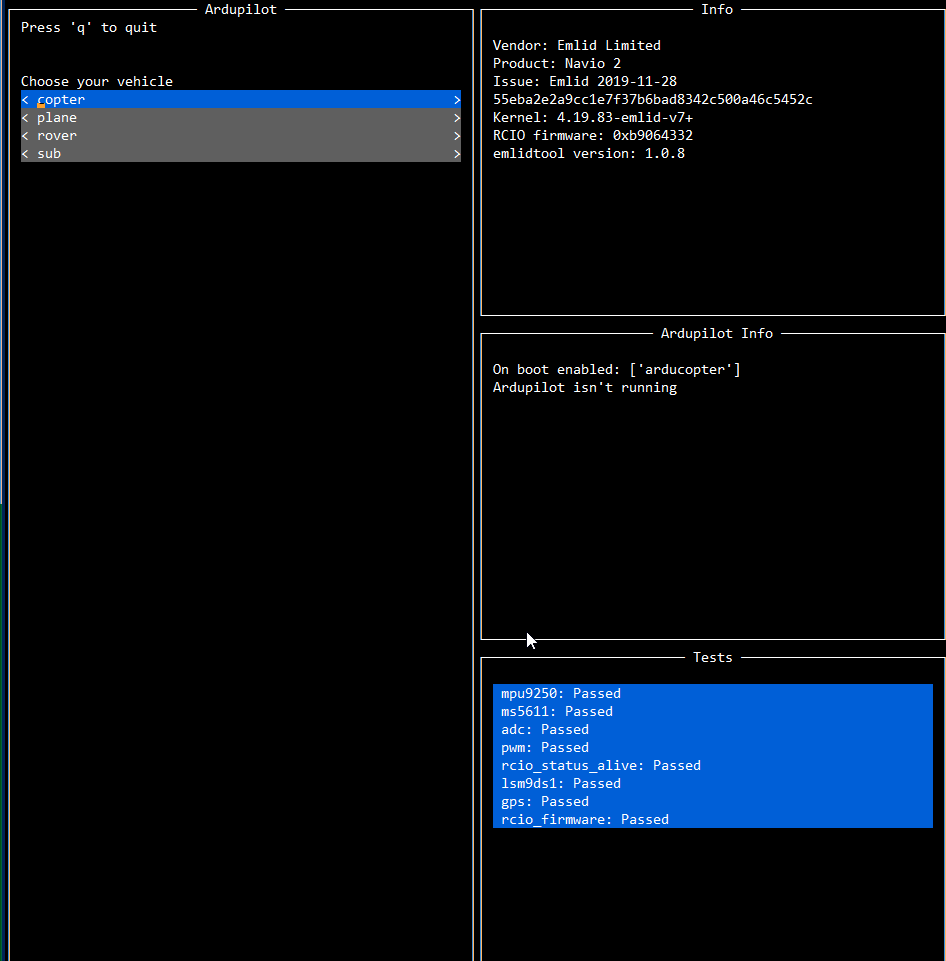
I have tried to use i2cdetect. Without the driver board connected this is the output:
pi@navio:~ $ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – – – – – – – – – – – – –
10: – – – – – – – – – – – – – – – –
20: – – – – – – – – – – – – – – – –
30: – – – – – – – – – – – – – – – –
40: – – – – – – – – – – – – – – – –
50: – – – – – – – – – – – – – – – –
60: – – – – – – – – – – – – – – – –
70: – – – – – – – 77
as soon as i plug in the driver board:
pi@navio:~ $ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – – – – – – – – – – 0d – –
10: – – – – – – – – – – – – – – – –
20: – – – – – – – – – – – – – – – –
30: – – – – – – – – – – – – – – – –
40: – – – – – – – – – – – – – – – –
50: – – – – – – – – – – – – – – – –
60: – – – – – – – – – – – – – – – –
70: – – – – – – – –
but sometimes the 77 is there for a little time:
pi@navio:~ $ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – – – – – – – – – – 0d – –
10: – – – – – – – – – – – – – – – –
20: – – – – – – – – – – – – – – – –
30: – – – – – – – – – – – – – – – –
40: – – – – – – – – – – – – – – – –
50: – – – – – – – – – – – – – – – –
60: – – – – – – – – – – – – – – – –
70: – – – – – – – 77
but just as quickly gone.
and sometimes there is a 6e:
pi@navio:~ $ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – – – – – – – – – – 0d – –
10: – – – – – – – – – – – – – – – –
20: – – – – – – – – – – – – – – – –
30: – – – – – – – – – – – – – – – –
40: – – – – – – – – – – – – – – – –
50: – – – – – – – – – – – – – – – –
60: – – – – – – – – – – – – – – 6e –
70: – – – – – – – –
but I don’t know exactly what this means.
I use the latest emlid-raspbian image 20191128 and arducopter configured to version 3.6.
The setup is shown here: Redirecting...
but i have connected the SDA, SCL, 5V, GND to the Navio2 I2C port and the servo VCC and GND to the Navio2 PWM header.