Hey
Yesterday we had a flight crash with the Navio version of AC3.3-rc8. We had some software panics with the compass and the ArduCopter-octa-quad not starting on bootup. It was spurious and sometimes the APM started.
We did a first flight where everything went well. On the second flight, the one where we had the crash, we had a first sign that things were not good, when the aircraft suddenly changed attitude about 13 seconds before the event that resulted in the crash.
The pilot tried to slowly bring it to the ground so as to land it safely, but the aircraft again changed attitude fast and started moving horizontally in a slightly oblique trajectory. The logs are not perfectly formated because the battery was ejected upon touch down, immediately turning off the Navio.
Even so we detected some very odd things that we find worthy of mentioning and are noted in the graphics:
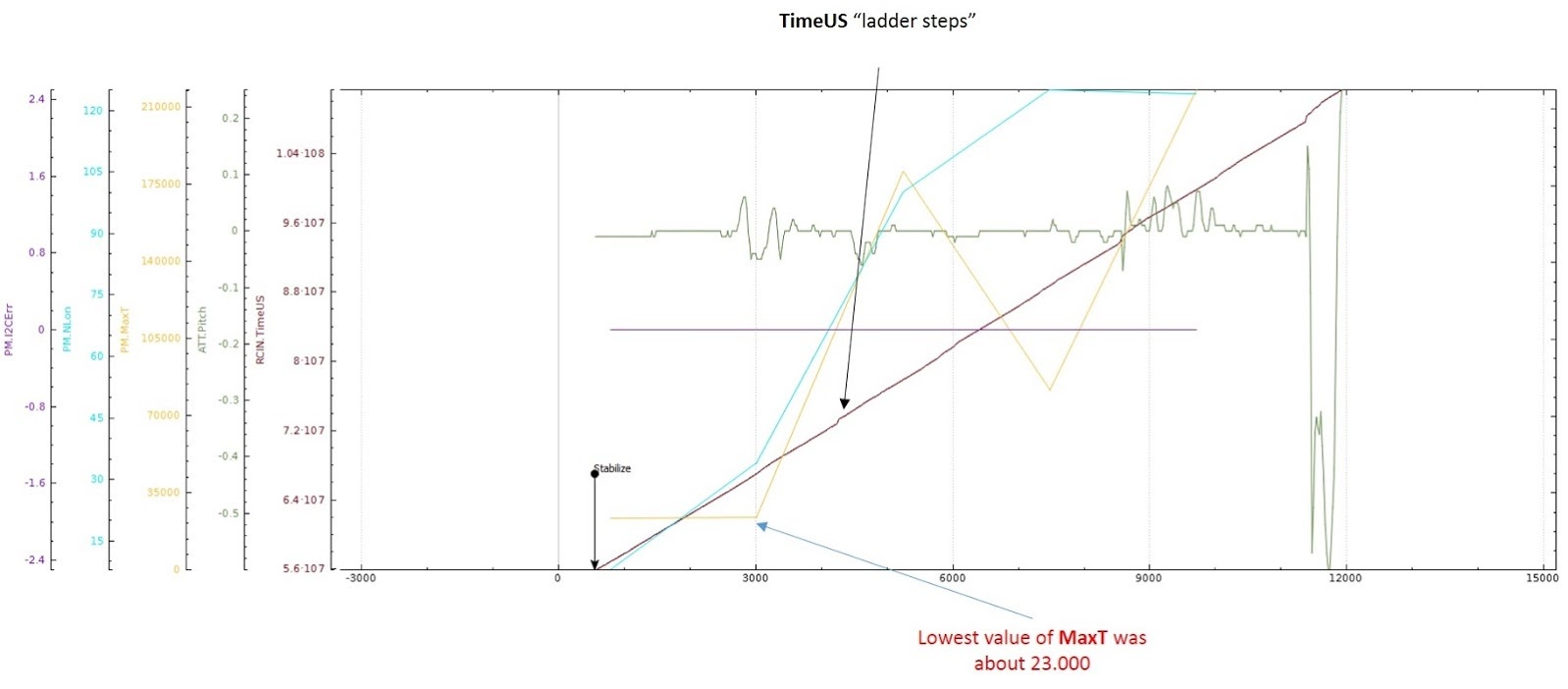
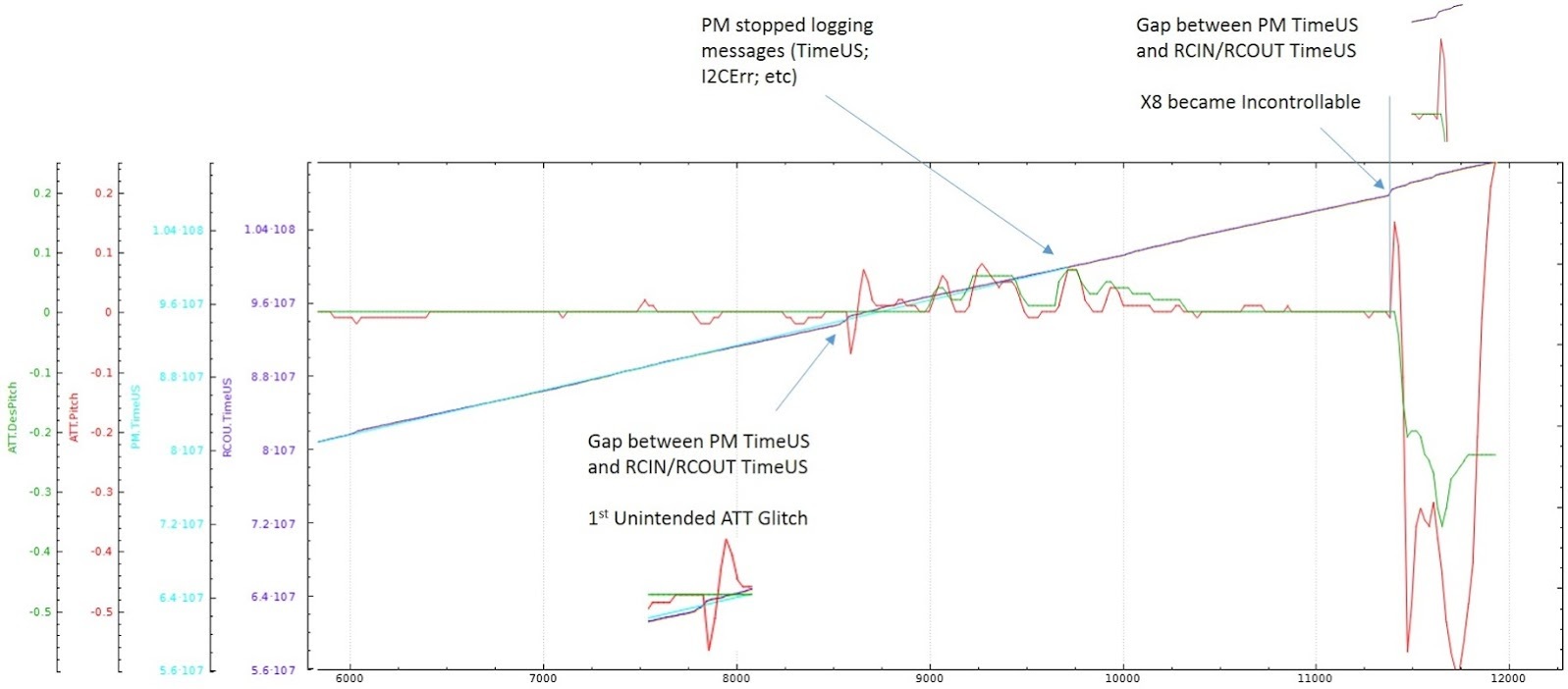
- In both of the uncontrollable moments there is a visible slope change in the PM message TIMEUS and the RCIN/RCOUT TIMEUS values.
- For some unexpected reason some time between the first glitch and the crash the PM message stops being emitted.
- In the first glitch the desired pitch and RCIN are maintained but the PITCH has a step input out of nowhere.
- In the crash glitch(2nd), as can be seen in the video and logs the pilot was slowly reducing altitude when suddenly the aircraft started
- The NLon time starts increasing since the beginning of the flight and the last values are 125, which for a NLoop of 4000 amounts to 3.125%
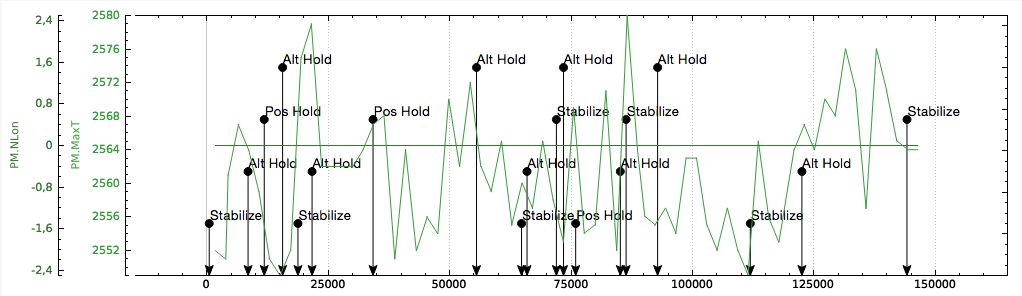
- Most importantly the MaxT is completely out of space in the entire flight. This is the most likely reason and the significant difference between the previous normal flight, where the MaxT never goes indecently high. Comparing to the 23.BIN, a flight 10 minutes before with no changes in hardware at all, we find absolutely normal MaxT values for the whole flight as can be seen in the attachment. The MaxT values we used to guide ourselves are stated in Randy Mackay post in Drones Discuss
One important detail is that a USB dongle attached to the Navio. We really really hope it was not the USB but we will make further tests to confirm this. We had previously flied successfully with USBs attached in the previous firmware version. We will later check the logs to try to spot something abnormal.
The first flight log is 23.BIN
The crash flight log is 24.BIN
I also keep a file which is a mavlink dump of the secondary telemetry, don’t know if i really helps. ard.log
We also recorded a bit of video. In the video you can see the slight attitude change around here:
And the moments before the crash the attitude change is: