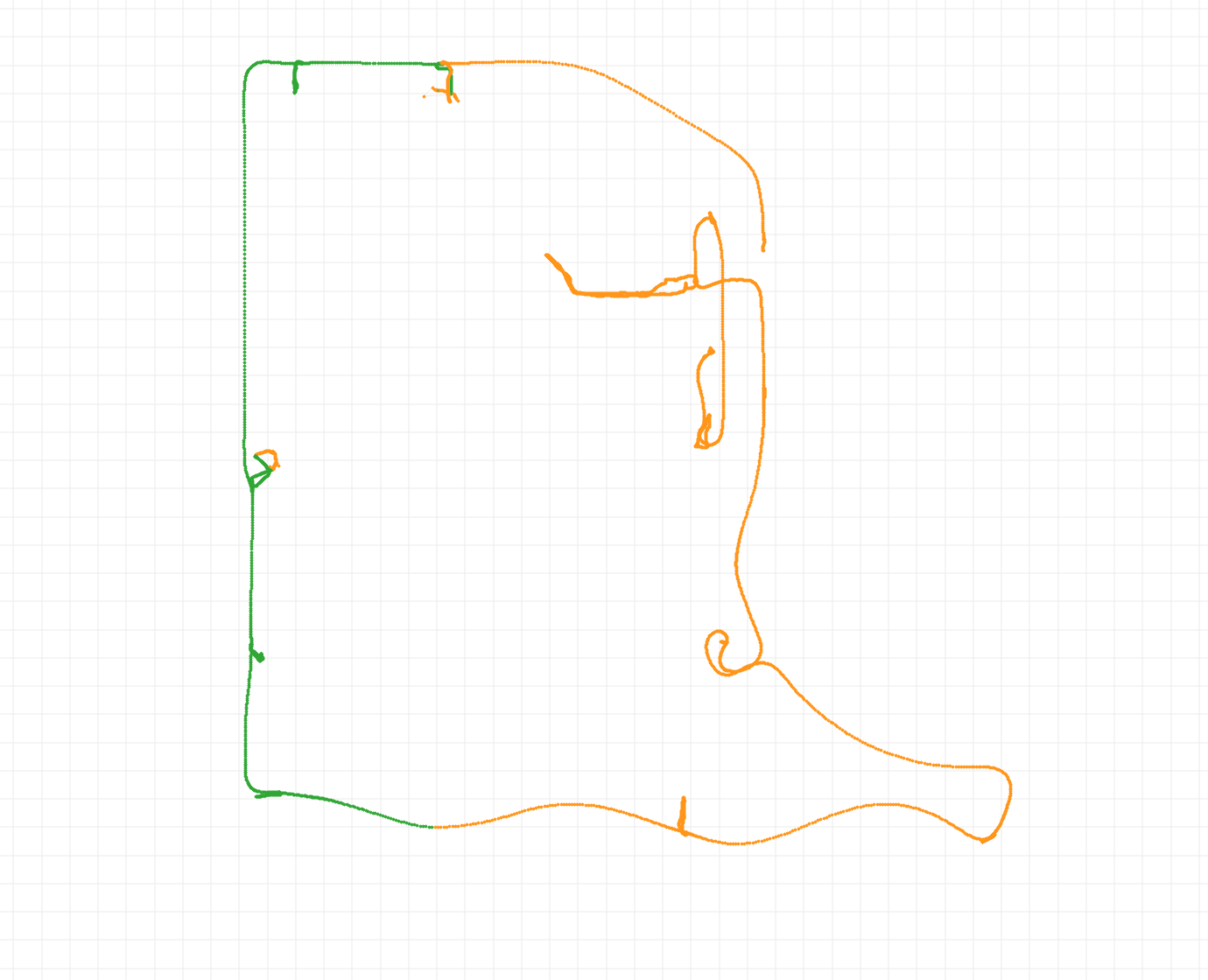
I was using my RS2+ as a base, RS3 as Rover, and flying lidar. I used RTK for the control points and topo shots but later decided to do PPK using Emlid Studio. The left half of the site is a fix and the right 1/2 is a float. I started in the middle and drove around clock wise. I have never had a situation where the fix line was divided down the property in 1/2 like you see below.
Thanks Joel! I will try that. I should have either noted it or just deleted GCP19. I had turned off the logging and realized I forgot to collect that GCP so I turned it back on and just collected that one using RTK. Thanks again for your feedback!
RTKLIB and Emlid Studio used to be the same, but they have been diverging. Now they are probably different enough that my comment may not be that useful, though still the data looks good. My result suggests that for this dataset, what RTKLIBExplorer might do by default can be done by Emlid Studio with a tweak or two in the settings. Or maybe not.
Hey Jbond. Man I wish I knew rtklib. I could not figure it out many years ago when I started with the original RS+. At the time I purchased ezsurvey which was expensive as all get out but very robust and easy to use.
Emlid Studio has come along way since that time. The fact is I now do all my stuff in RTK and the results have been rock solid. But on this particular job, I was testing some lidar data. I had some issues processing the lidar and so I decided to PPK the RS3 file and I ran in to problems processing that. Using EZsurv, there were some points that were VERY different from the RTK data.
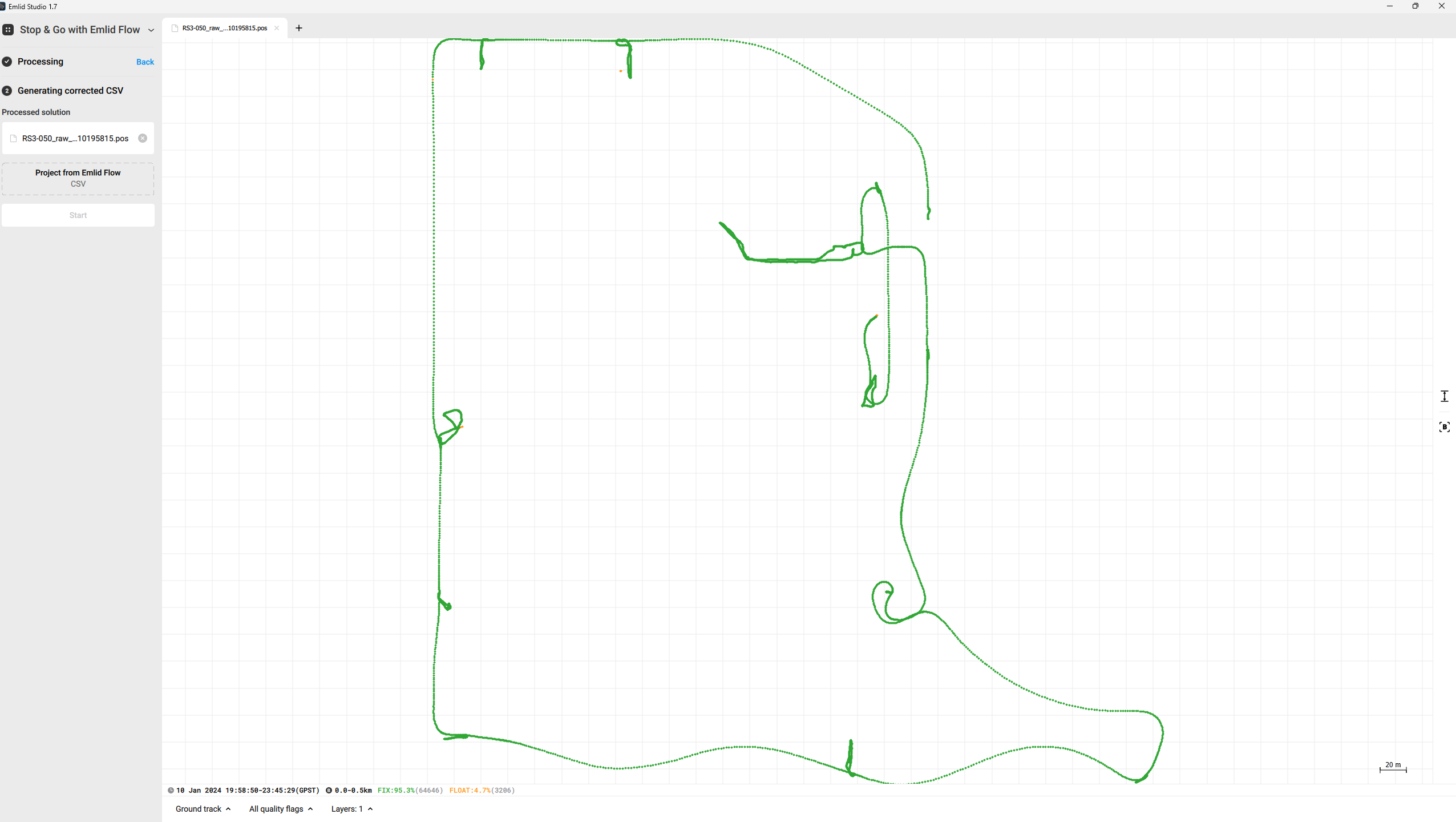
I then processed the data in Emlid Studio and got the 1/2 float issue that I posted orginally. JoelBladen posted that he simply changed it to combined and got fixes. I changed it and that did indeed help.
I think it would help if Emlid staff clarified what Fix vs Float means. I’m not convinced the stated definition is accurate based on what people see the software do…
I see the initial issue was already solved. I also post-processed your logs and obtained 99.2% FIX by enabling the Combined filter type. This filter can sometimes help improve the results by processing data forward and backward.
Float solution status means the rover receives corrections from the base but can’t resolve all ambiguities. Its accuracy usually ranges from several decimeters to 1-2 meters. Fix means the receiver resolved ambiguities in the position calculation. It usually has centimeter-level accuracy.
The results of PPK are related to the quality of the logs you use in processing and, thus, the environmental conditions of the survey. To obtain the best results, follow our recommendations for the receiver placement.