Hi,
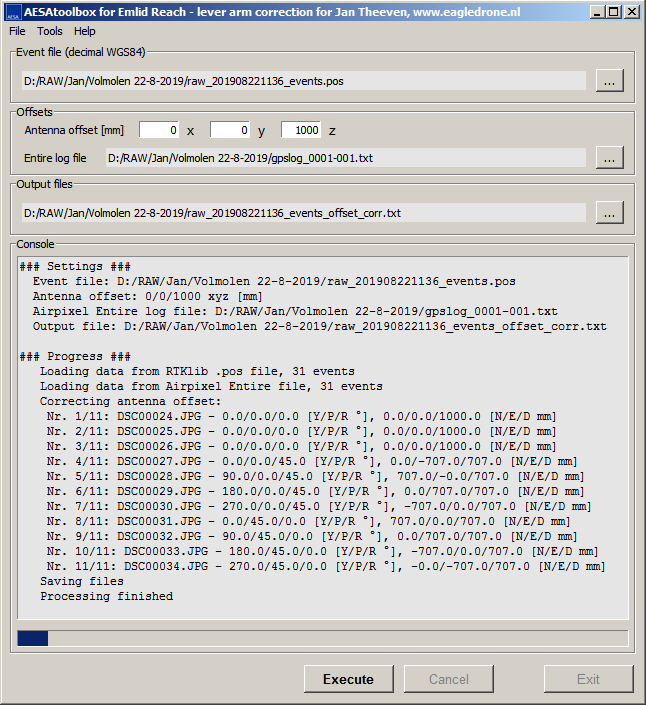
I have written a small standalone Python program for Windows to apply 3d lever arm correction to time marks recorded with Emlid Reach devices.
The script does a full 3-dimensional rotation of the lever arm based on the pitch, roll and yaw values and transfers the offset from the vehicle body coordinate system into the world coordinate system (decimal degrees).
Depending on the length of the lever arm and the roll, pitch and yaw values the error introduced by the lever arm can be significantly more than 10 cm.
I did write the tool for @jantjj and for myself. It can retrieve attitude data based on an Airpixel Entire (for DJI M600) or Arducopter log file (with cam messages) as well as image EXIF data (P4P etc.). Other sources could be integrated too.
If someone is interested to use the script and give feedback I’m ready to share it under my personal “share your benefit approach”, i.e. I would like you to share your benefit by making an annual donation to the Against Malaria Foundation via this link: AMF .
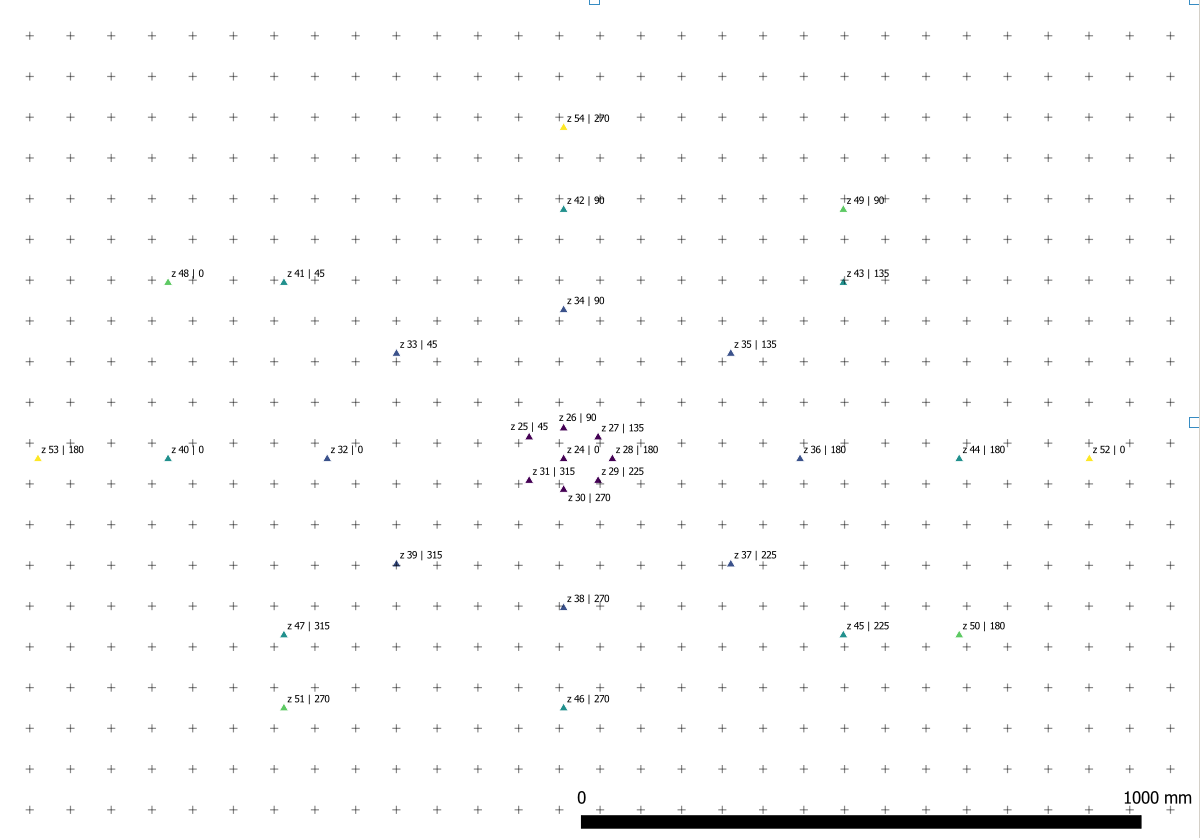
This is what the result looks like for a lever arm with 0/0/1000 x/y/z mm and differend heading (0, 45, 90, 135, 180, 225, 270 & 315 °) and roll (5, 25 & 45 °) values (color = height). Points > z 47 have additional pitch values.