I’m trying to evaluate the positioning improvement with the Reach RTK GPS (as secondary) over single standalone GPS - the Here+ (as primary).
I’m using:
Mission planner 1.3.49
ArduCopter 3.8.0
Pixhawk 2.1
RFD900: MP -> Pixhawk (to inject the corrections)
WiFi: base station -> MP.
I perform the following test:
Setting up the Base station using a geodetic RTK GPS (manual).
Measured 5 points with high accuracy. (using a geodetic RTK GPS)
Walking between the points with:
2.1 Pixhawk with Here+ GPS as standalone.
2.2 Pixhawk with Here+ GPS as standalone (1st GPS) and Reach RTK as RTK module (2nd GPS).
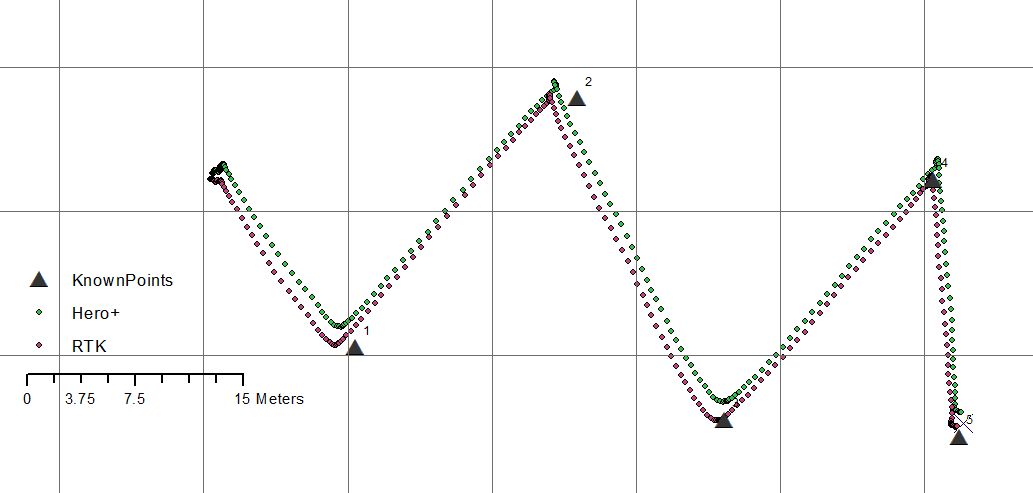
Analyzing the Pixhawk logs using the GPS&GPS2 Messages.
What kind of improvements were you expecting?
The corners look better defined and there is clearly an offset between the tracks,
The uncorrected GPS looks filtered and smoothed, which is normal for a non RTK GPS.
Have a look at the GPS altitude, RTK altitude and Altimeter altitude, you will see a difference there.
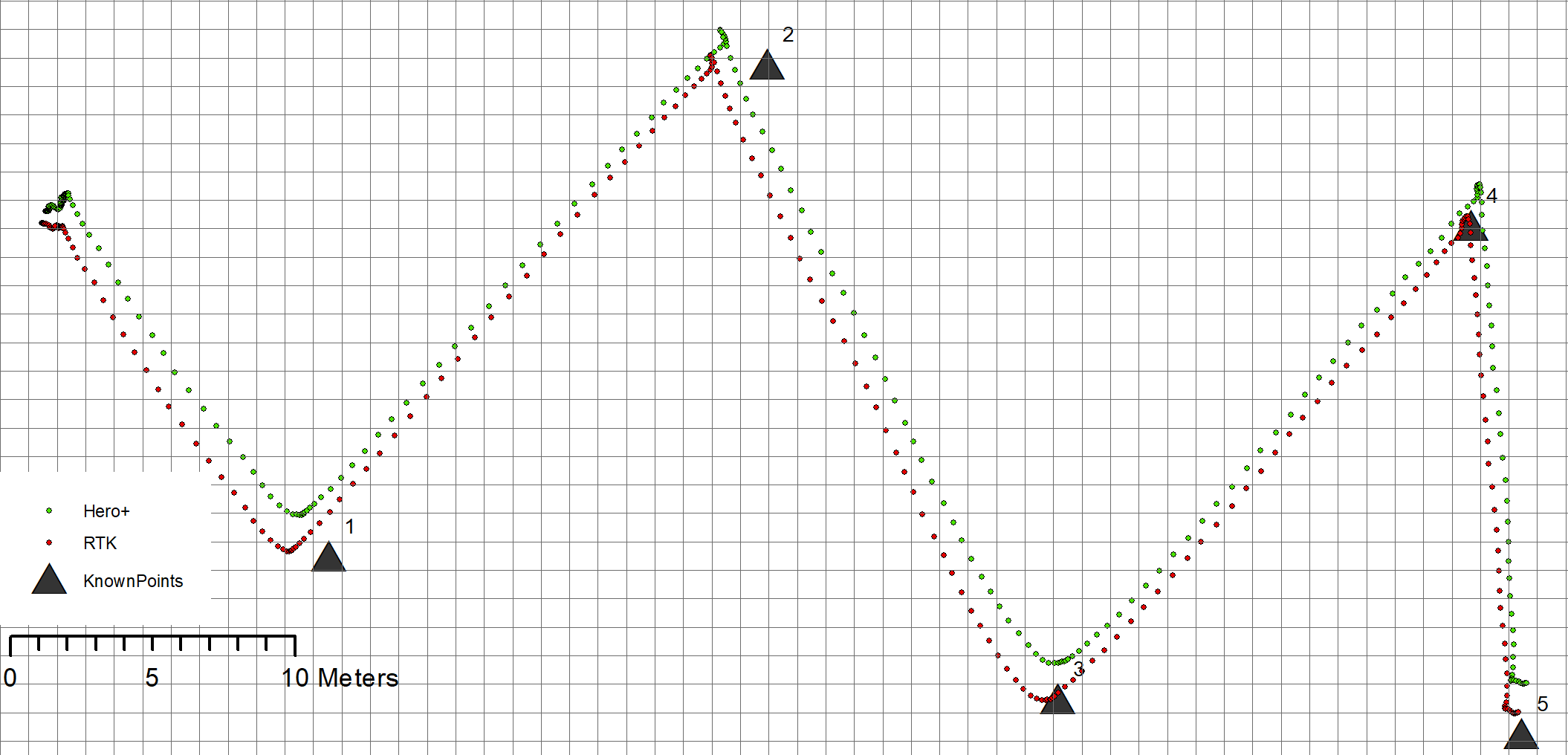
Also compare the same scale. Last image is 1:1 and your first is more like 1:15
GPS deviced compared might not be of the same quality and could perform differently.
Agree. But higher resolution will reveal inaccuracy better, so comparing tracks like this should be done on similar terms.
Edit: grid it looks like 1:7,5 scale, right?
Good, at least now they are equaly to compare.
But from what i am looking at it seems like both are operating under the same condition. But could be tricked if the singel gps were operating very well. But back again to resultion. a 1:1 showing cm plot would reveal if a gps is operating in singel or not. But you need to zoom in an a area with static movement to get enough data in a smaler area