Hello,
We have recently started to explore Emlid M+(rover) and RS+(base) for implementing ppk solution for the data captured via drone employing Micasense rededge camera. Every time we do survey, we are encountering a mismatch problem between the number of images and events captured. We would like to invite your suggestions and feedback regarding this.
I am attaching logs from two of the test
Test with drone flying at around 30m height at slow speed. (Micasense has 357 images, events has 360 events) Flight1
Test with drone kept static on ground (Micasense has 458 images, events has 399 events) Flight2
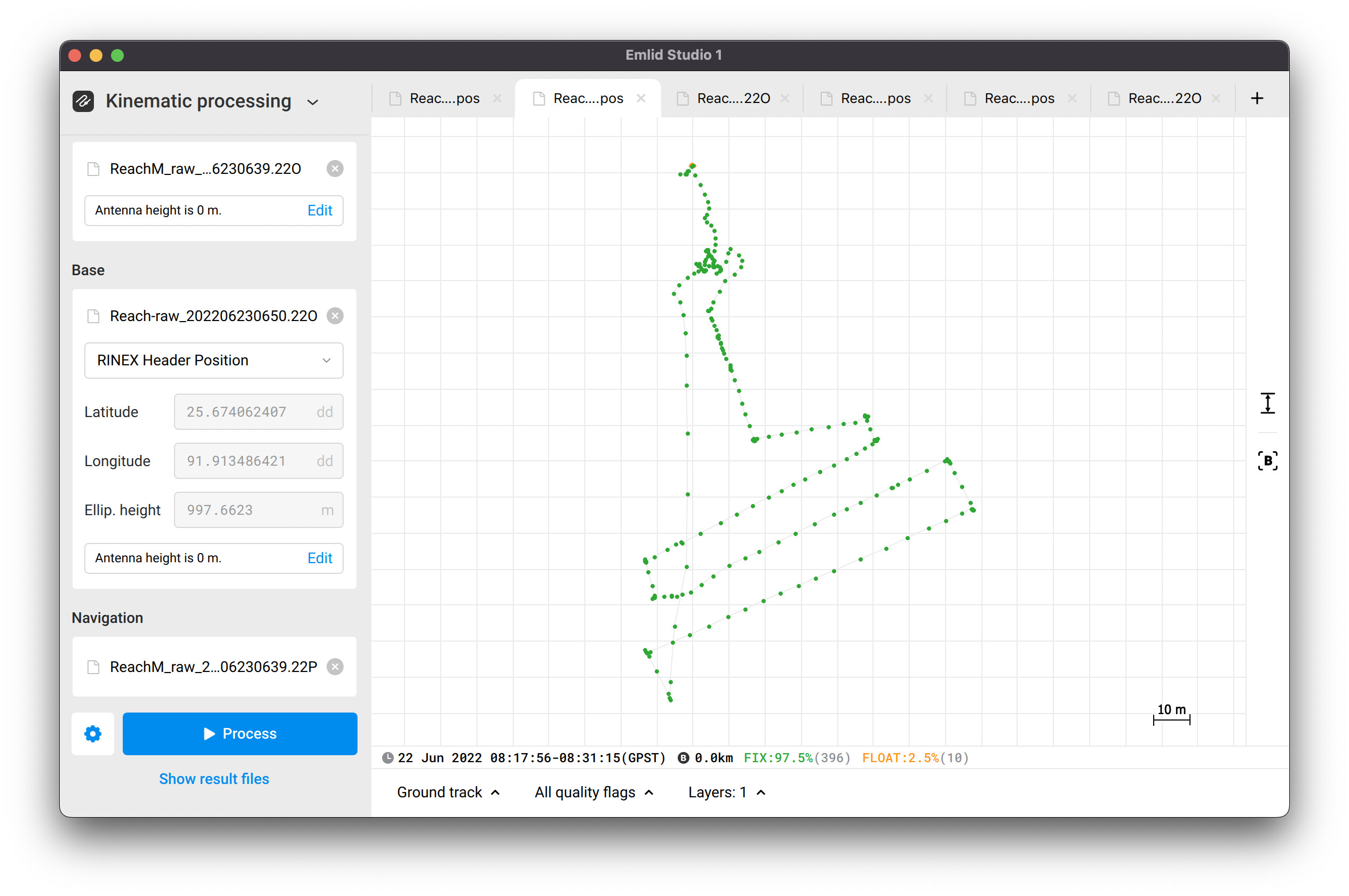
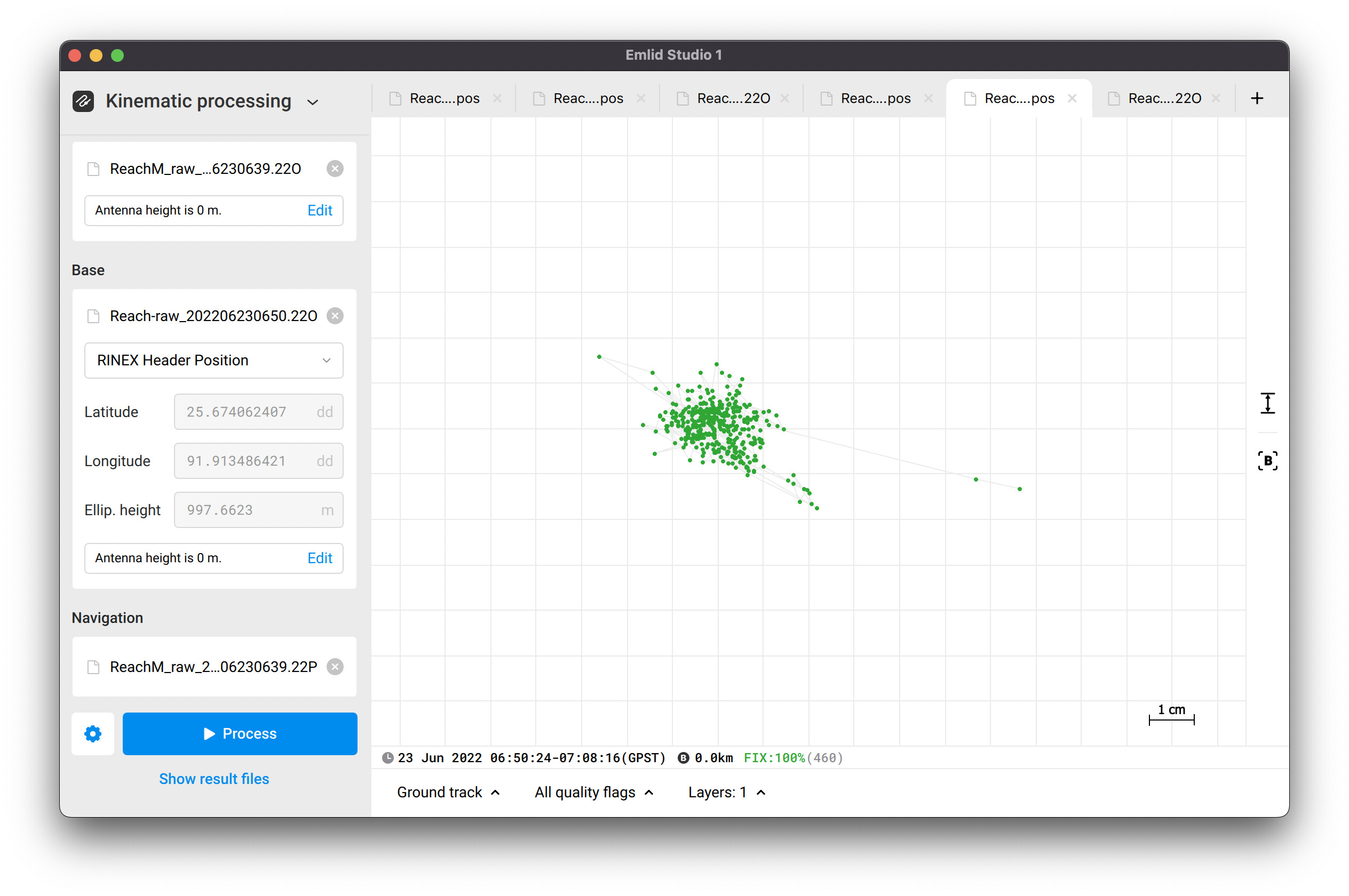
Thank you for your logs from both flights. I post-processed them in Emlid Studio and obtained another event’s number. I got 406 events in the first flight and 460 events in the second one. You can take a look at these screenshots:
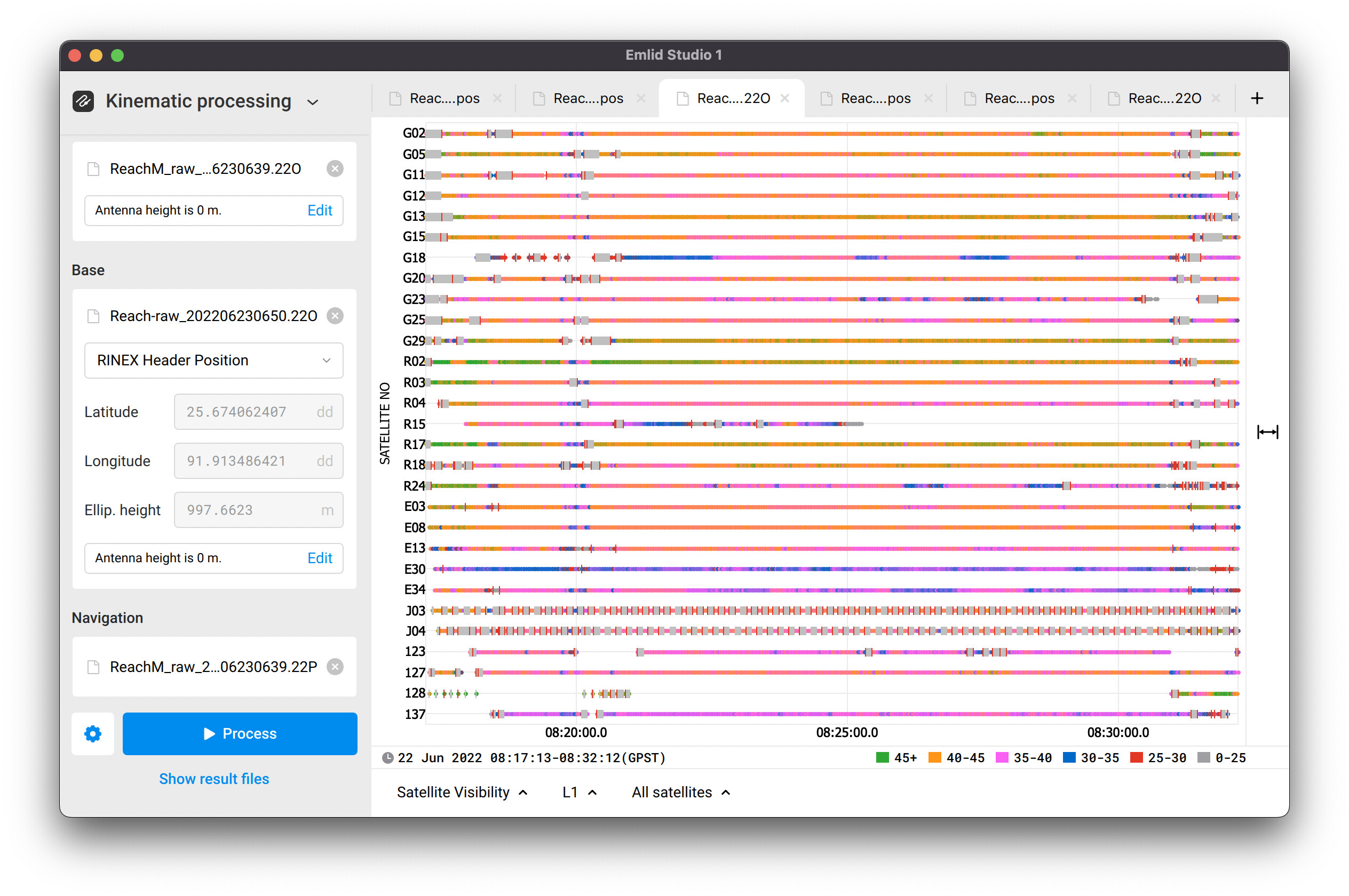
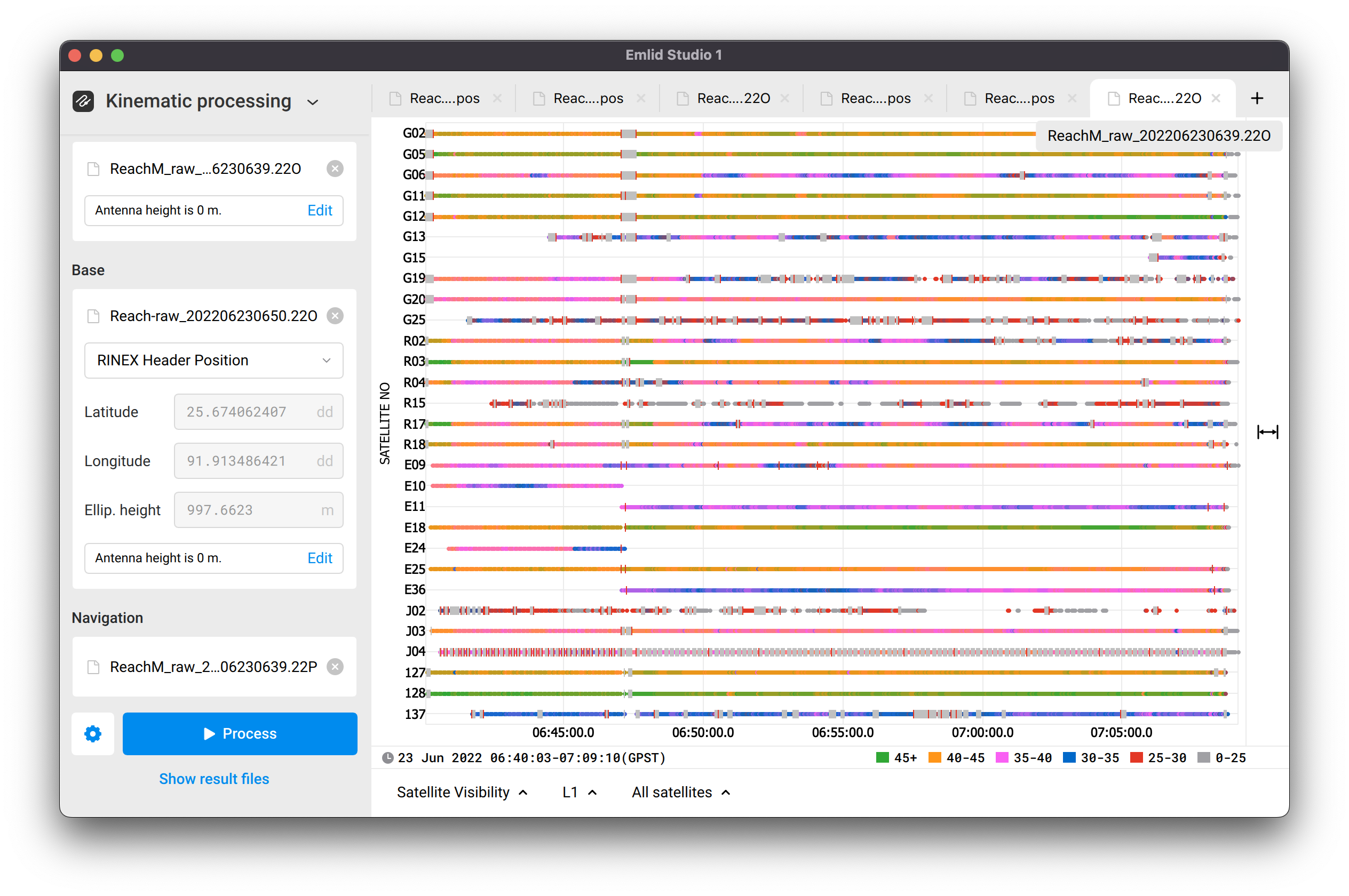
However, there is still a mismatch between the images’ and events’ numbers. According to the logs’ quality, it can be related to the strong interference affecting Reach. There are many gray bars that mean cycle slips as shown in the plots below.
Hi Kirill,
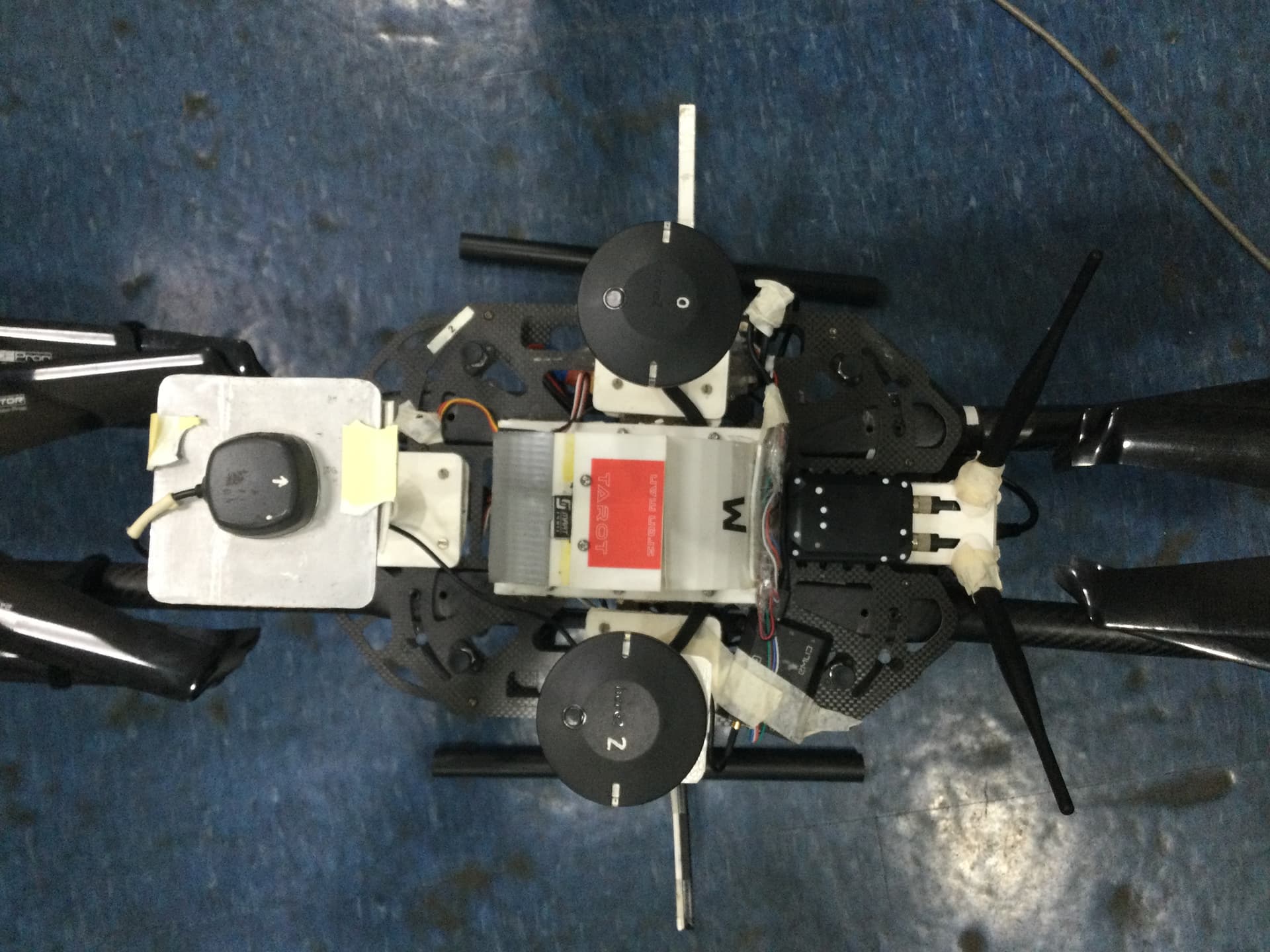
Please find the attached photos of our setup. The Tallysman receiver is around 5cm higher than the here2 gps. Also there is a good offset of around 12cm horizontally.
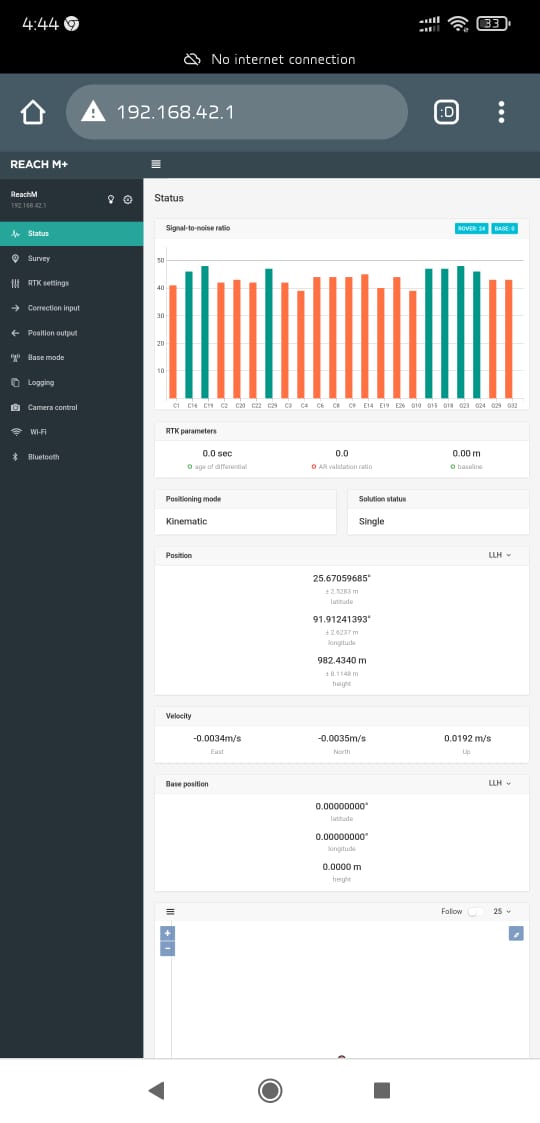
We did an experiment where we have powered down the drone and had only powered the reach m+, still the signal quality didn’t improve and all satellite status were in orange (SNR<45).
We connected the reach m+ via wifi and were monitoring the signal status (SNR), on going over 40m altitude we were getting only one or two green bars. The observation started right from drone being in non-powered state to a hover state. Can share the screen recording also.
Yesterday we had put the GNSS receiver along with ground plate on a large sheet of aluminum foil and observed that we get 8+ bars in green (SNR). All the conditions like the position of drone on ground, weather etc. remained same.
On doing the above experiment we tending towards some possible conclusion. I request you to make us better understand and to give your expert advice.
a) There is no interference from the electronics of the drone. We are stating this from experiment number 2.
b) There is no or minimal interference from the drone structure. As you can see our receiver is the highest point vertically (about 2 inch from anything on drone) and has horizontal separation too. We also moved the receiver about 8-9 inch higher (vertically)in the same setup but didn’t observe any quality improvement (drone was not powered). If it was from drone structure then the quality should have improved on getting the receiver away from the drone.
c) The aluminum foil experiment suggest that the receiver need more ground plane then the one suggested in document, but this is not possible as we cannot have such large metal on a drone, its unsafe and not feasible too.
I have some question
Is M+ capable enough to be employed on a drone? if yes then where are we going wrong and if no then what improvement we should go for to get better.
Also, we had make a hole in ground plate to take the signal wire out but it didn’t improve anything.
I agree that the best SNR quality you receive is when you totally isolate the antenna with aluminum foil, like in your last photo. But the high SNR value doesn’t mean that there’s no issue. I mean, the SNR can be high enough, but the issue with missing time marks may persist.
The main thing here is that RF noises affect Reach itself rather than the Tallysman antenna. It means that you have to isolate not only the antenna but the receiver as well. According to the first photo, hot shoe adapter wires stretch right above the receiver and stick to it by tape. It may only be the one reason for such an issue. Reach should be appropriately isolated, and you can wrap it with aluminum foil. You can check our docs to learn more about isolating the receiver.
Regarding GNSS settings, please check the required settings here in our docs. Their configurations is essential for the good setup quality as well as the proper isolating.
Hi Kirill,
I will implement the modifications as you have rightly pointed out.
I still have a doubt, based on the recommendation in the docs, the update rate for M+ can be 10Hz only when we have GPS option enabled but it has also been mentioned that for Drone flight 10Hz is better. Does it mean that I should only enable GPS with 10Hz for reach M+ when operating on a drone?