



Today will be the Maiden Flight.
All completed. Now charging, configuring motor order and putting props.
Stay tuned.
Today will be the Maiden Flight.
All completed. Now charging, configuring motor order and putting props.
Stay tuned.
Swift travels. Look forward to seeing some results!
Just came back.
Did around 8 take offs and landings.
No crash, no hard landing.
Power is sufficient.
Pitch and Roll are OK.
However there is absolutely NO YAW response (channel 4) - and copter yaws itself in Stabilize mode.
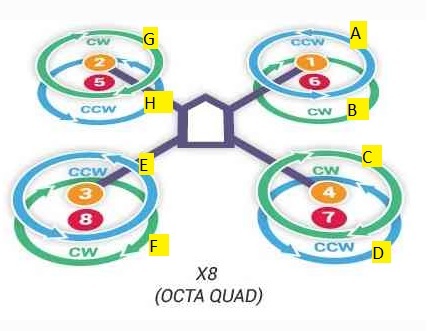
Any ideas what can be the issue? I connected and tested motors in Mission Planner same as on this picture:
Note: Pitch and Roll are completely adequate.
In the log there are messages like this:
EKF2 IMU1 ground mag anomaly, yaw re-aligned
I have a feeling it can be magnetic interference from the wires…
00000039.BIN (4.3 MB)
Analyzed the log.
Basically my LiIon layout is a big flying electromagnet.
I’m lucky drone did not flip or lost control. Just yaw was not working.
Alright. Tomorrow going to another city to meet with my partners. To my luck they have hobby shop - we will try different LiPos there.
On the good side - Arducopter -> Mavproxy <- QGroundControl (iOS) combo seems to work stable now.
3g automatically starts on RPi and connects; Ardupilot connects to Mavproxy (via UDP); QGroundControl connects to Mavproxy (from iOS via TCP). All functions work well, including calibration, telemetry, etc.
I am though getting issues with public IP (Digital Ocean hosting): people try to crack SSH there.
I enabled fail2ban.
Need to think more on security.
And especially - on Mavlink security. Did not analyze it yet. Someone catching control on my drone - not a good thing!
This design is temporary on hold as we had to use parts for other designs.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.