Hi Emlid team and all friends.
I try to utilized my Reach + Pixhawk / PPK mapping setup for helping friends (Surveyors). Is not an easy way for me to start because of my background, only a drone hobbyist.
I follow all resources from Emlid and Tuffwing web already. but facing some problems. question
I cut the end-plug and replace it with 2 RC Leads: the Positive to Reach Time-mark + Negative to Reach Ground, and Second Lead to Pixhawk pin 54 (Geotag) only, No Ground pluged.
Question: Is that format Correct/ will Works?
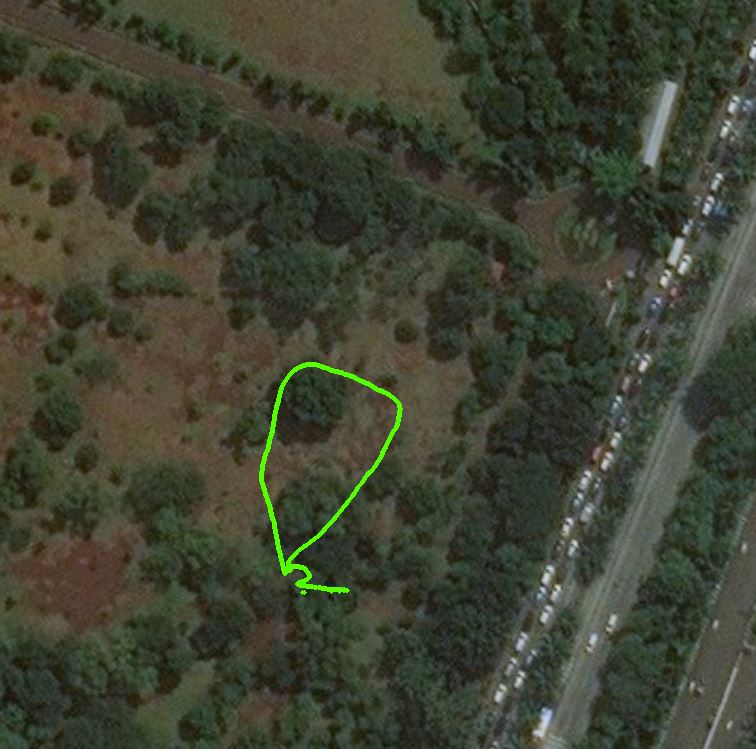
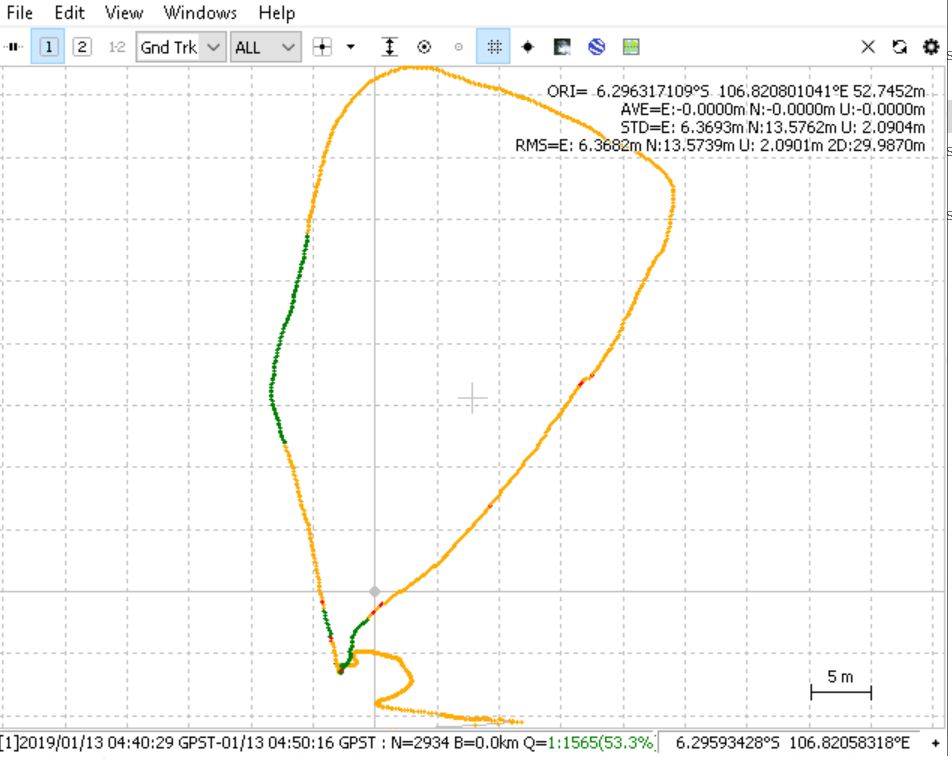
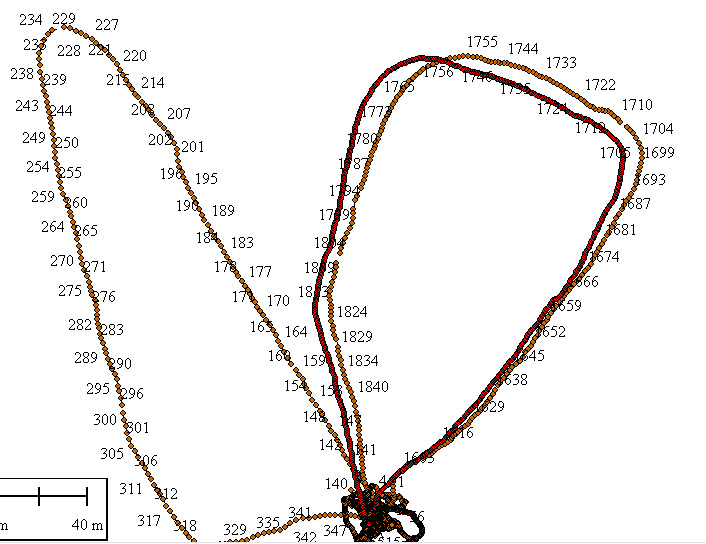
We already did some experiment (no fly - walk only) and did some shots. when we read the result, the Path is far from accurate. We will try again of course, after get some guidance from this forum.
Any input will be appreciated. Thank you very much!
best regards
Gboediman
The path without TIME mark, isnt it?
I wonder where did I go wrong.
Suspect:
wiring - loose
no signal from hot shoe
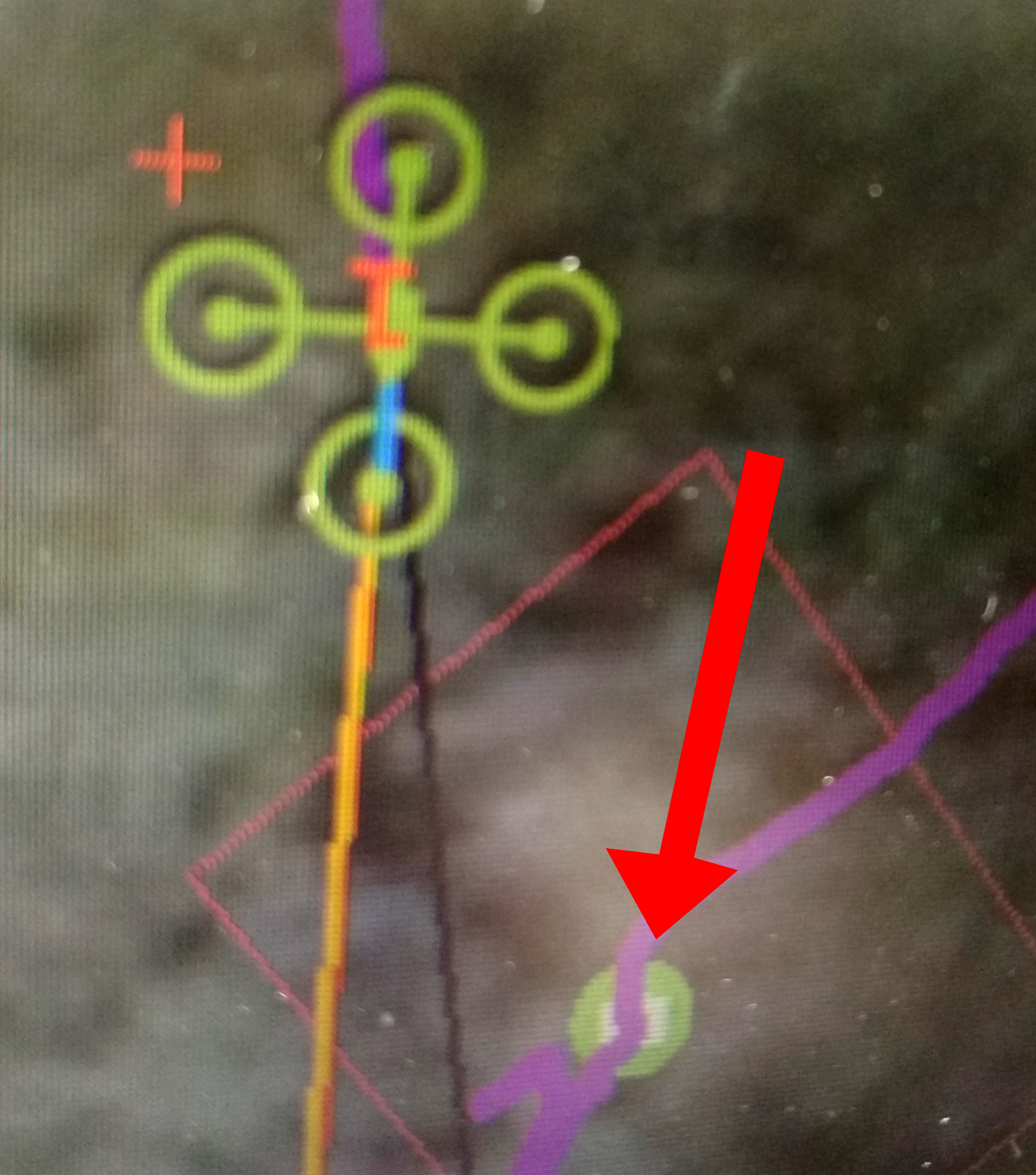
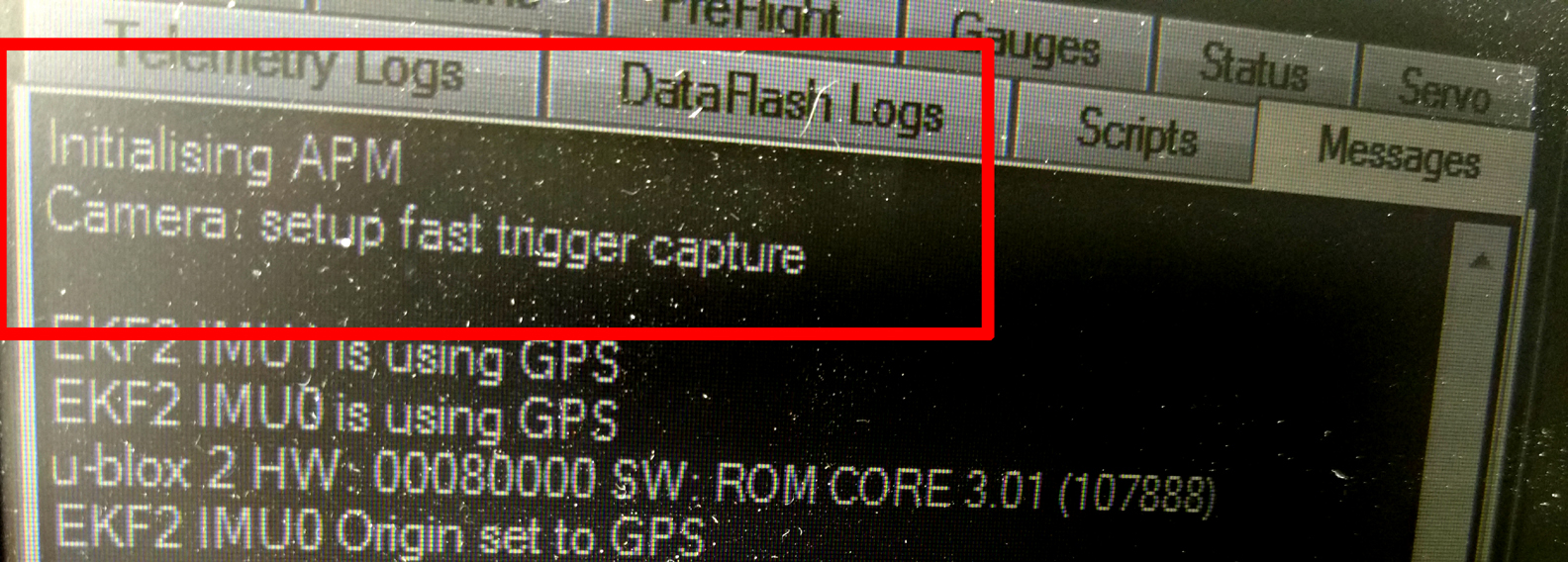
other thing is: on Mission Planner. The Green circle Camera icon from cam_feedback activity was only pop-up once, suppose to be multiple, right? and from the Message window, shown that the fast trigger capture text, also appear only once.
I need suggestion from you, and friends :
How to TEST/ make sure the hotshoe send a signal to time mark and is injected to Reach GPS? - before we start real mission.
Is the Photo capture Icon on the MissionPlanner appear only 1 (one) due to error on signal from Hotshoe to Pixhawk log? (photos below)
Dear all, I have NO LUCK.
wiring set up:
Hot shoe = (+) split to AUX port 4 and 5 Volt/ Vcc, for (-) to Ground pin of AUX 4
the back rail on PX already 5V powered
No sign of voltage drop from 5.2V when I triggered the A6000
But if I push the TEST Button on the hot-shoe, the power drop as expected (to 3.2V ish)
dont know what to do next- will start from beginning again with new wiring.
I just read the forum again - and some from DIYdrones forum too: have some questions: 1. which is correct:
A. PX shutter pin 55 to A6000. and the hot shoe (+) to time mark (-) to ground of REACH
or
B. same as above but split the wire from the hot shoe to AUX4 too (cam_feedback pin) with 10K resistor
2. why some use 1K or 10K resistor on 5V /Vcc wire of hotshoe that goes to aux4? 3. is there any test that can make sure the time mark on REACH is working properly? (before we download the log)
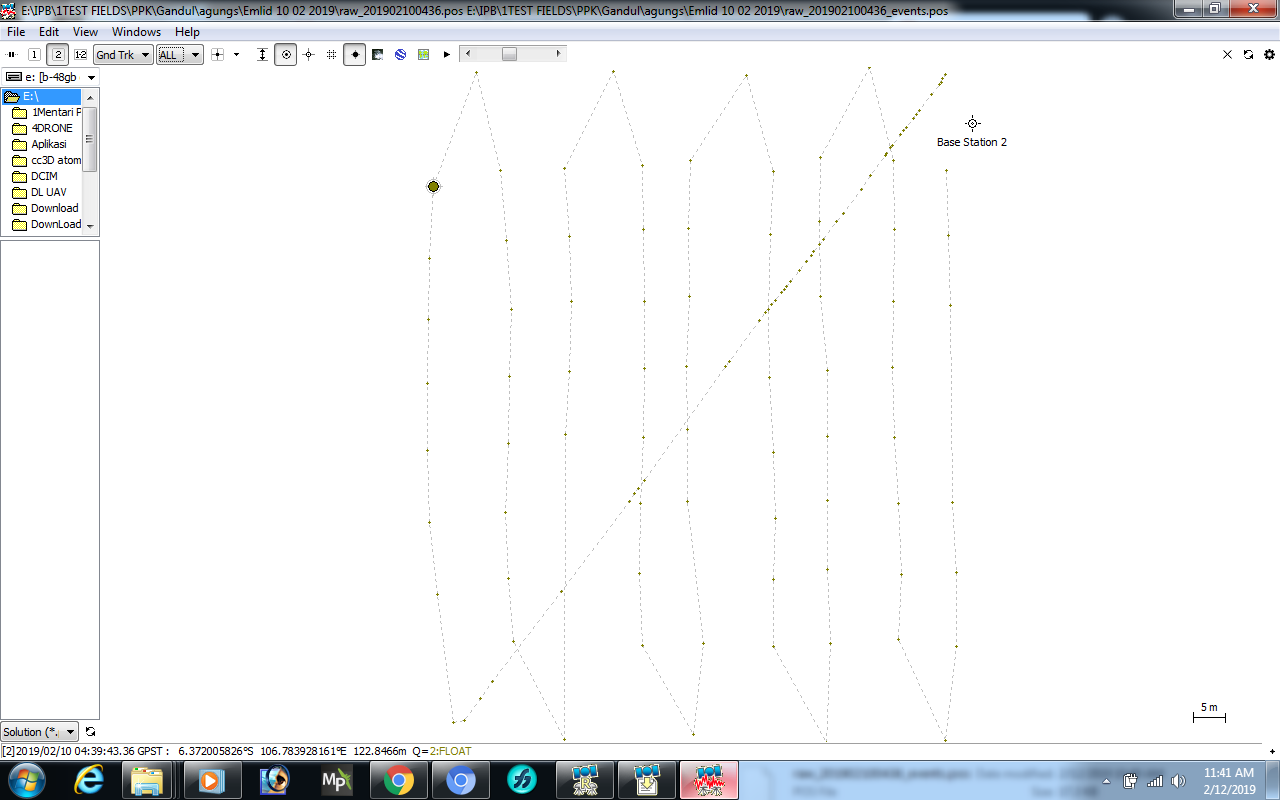
Did some test again, but the BASE suddenly restart for several times. The path should be longer than that.
The wiring I made more simple, from hotshoe no split to Pixhawk. only to Reach.
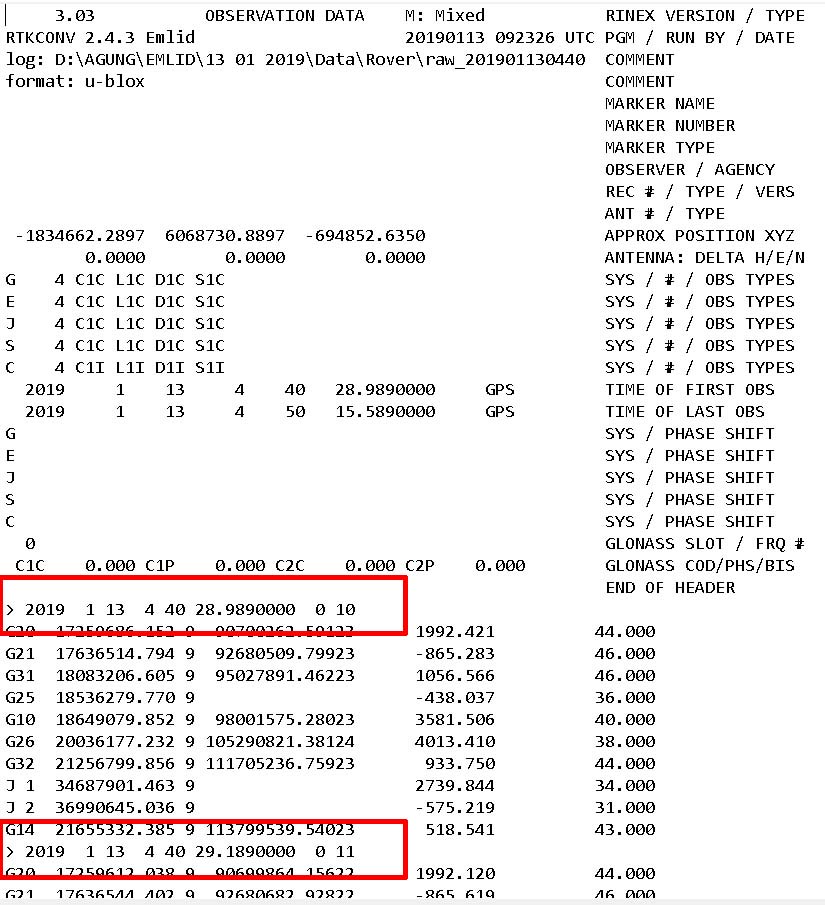
some progres I think. the TIME mark file is there now. (.pos + .events.pos)
Will try another walk photo session with rather geometric path and make sure the BASE is always ON.
Hi Tatiana
yes i did 2 very small test just to make sure the file.events.pos is there …and good Lord, they are in the result folder.
The Time mark/ cam trig DOT quantities on the map (PLOT) also shows the same number (10 x trigging) as the JPG files. So far we are happy.
The test was done in front of my class (yes, im an Art Teacher ), cloudy and lots of tress.*
Next we will go to field to test in open space and good weather. also will test with split cable to AUX pin 53 Cam_feedback.
Is rainy season now - 2 weeks cant fly the UAV.
will be back soon with more good result!
Thank you Tatiana.
1. in my understanding, range correction between rover and base RTK methode is limited to theire RADIO telemetry unit, correct?
2. How about in PPK, how far is the Base range can reach for the best result? my friend can not find the answer any where. are we misunderstand how the PPK works?








 ), cloudy and lots of tress.*
), cloudy and lots of tress.*