



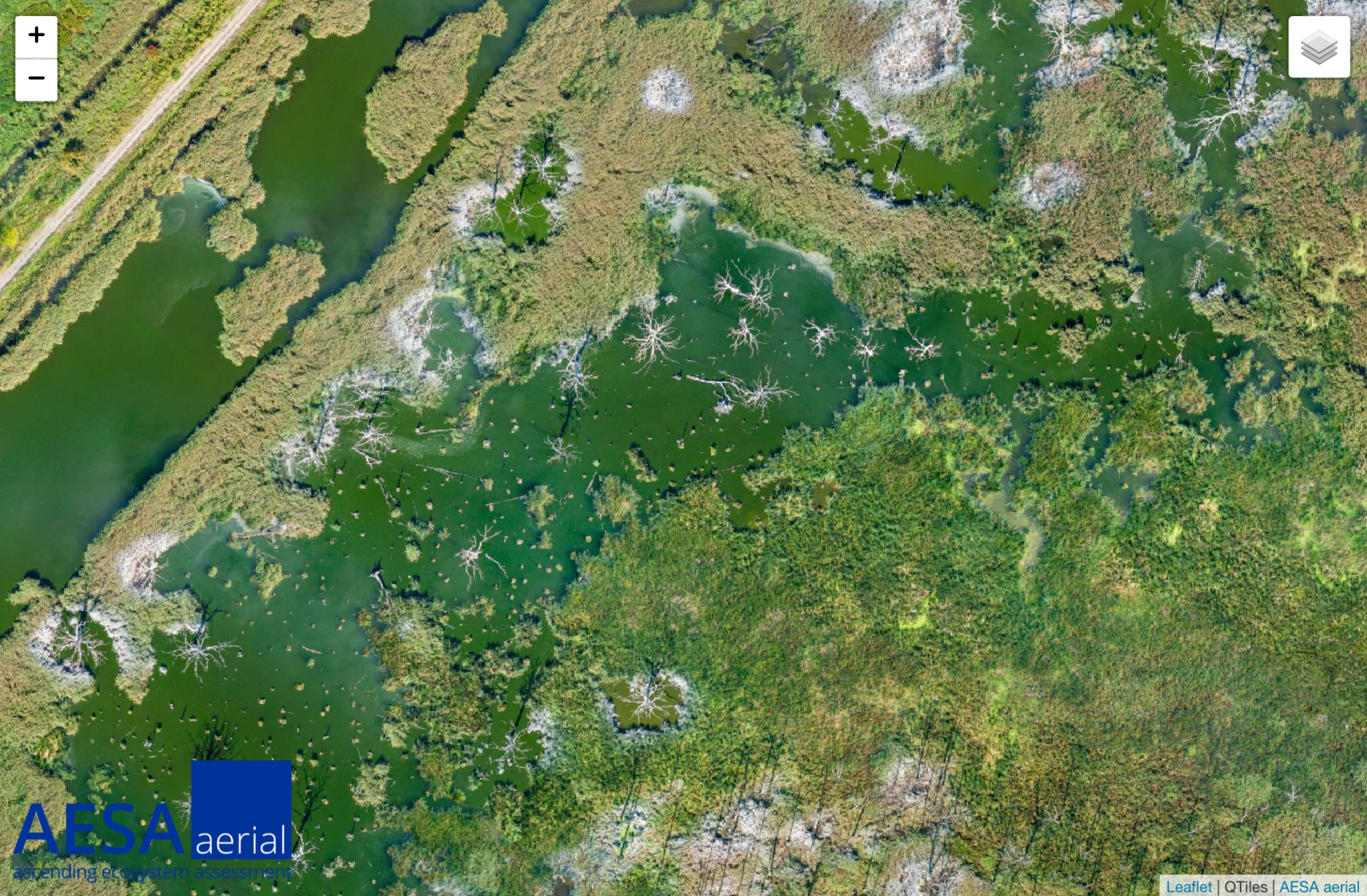
Comparing a UAV derived digital surface model (dsm) with the official lidar based digital terrain model (dtm, DGM1)

My first report is about the mapping of 450 ha rewetted peatland which I did in autumn 2018. My base was installed 3 km way from the mapping area. The position of the base was determined by using an topographic point (accuracy of the point ~10 mm) some 100 m away.
I’m mapping with a custom build hexacopter based on Arducopter. The take-off weight is 2.3 kg and the flight time is about 28 min in summertime and 18 min in wintertime (I use significantly less than 80% of the battery capacity). The images are taken with a Sony RX100M2 which is mounted on a 2 axis gimbal and connected to a Reach module. I did fly missions from several different starting points (really hard work carry 75 kg of stuff through the peatland) with an overlap of 80%/60% (front/side) and a speed of 8m/s.
In order to get the camera positions I did post processing with RTKlib (without additional data such as clock file etc.). and lever arm correction and transformation into ETRS89 / UTM zone 33 and DHHN2016 (orthometric) height with a custom python script. The photogrammetry part was done with Agisoft Metashape (processing settings high) and exported with a resolution of 7 cm/px.
To get an impression of the height accuracy of the produced dsm I did compare it to the official dtm which has a resolution of 1 m and an accuracy better than 0.15 m. I did that in QGis and did a more or less biased sampling by picking 30 points with bare ground from all over the dsm (s. fig. below).
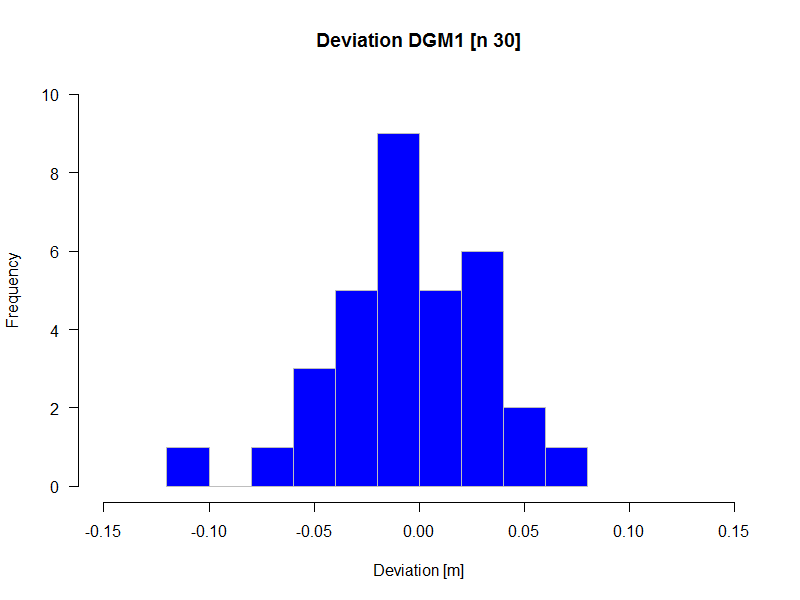

The standard deviation was 3.7 cm. I think the result is quite satisfying (since the deviation is a cumulated error from base position measurement, camera position measurement and photogrammetry processing) and could be even better when using ground control points, flying with more overlap and slower speed.