



Yes, and in addition you will not be able to see the GCP until you hit the horizon of the cleared area. I think that is why @fin recommended a 2m radius around the GCP, but that may not be enough depending on your altitude and how many match you are trying to acquire. I recommend at least 8, but 12 would be better.
Wow this is becoming a HOT topic.
I don’t have any skin in the game, but from lots of reading and learning with you all over the last year or so, common sense tells me the “GROUND” Control Points need to be ON the GROUND. Screw all that metal piping mess floating over the crops. It also seems to make sense of using as many GCPs as possible, especially around (offset from) the physical items you are surveying… i.e the pipe line. The “ground” here seems pretty important for a good quality survey or it’s all just arbitrary and assumed.
Even if you can use all these GCPs offset vertically from the ground terrain, can everything just be shifted vertically in post processing (or during?), assuming each post with GCP on top is consistent height, i.e. 2m from ground to top of GCP.
We have to remember that this is all very new in theory as related to drones and they are referred to as “Ground” because the theory comes from survey and traditionally with a drone they have been on the ground. GCP’s can be anywhere that you have a surface large enough to get a good flat point and you can collect a coordinate on. Tops of buildings, raised platforms and tops/toes of civil structures are all fair game. You are correct that the more GCP’s the better, but like i said earlier it is a choice between what level of accuracy is good enough for the task and how much you are going to spend on labor. The whole point of putting RTK/PPK on the drones was to eliminate GCP’s, but as I have said since that method has started, "You will never get rid of GCP’s as long as you are wanting ground truth absolute accuracy.
Also, trying to get a “ground” topo on a vegetated field is a very tough task. There will need to be enough points visible through the vegetation to create ground points and then you will need to have the ability to edit the resulting point cloud in order to obtain a DTM.
1 Like
What i actually said was :
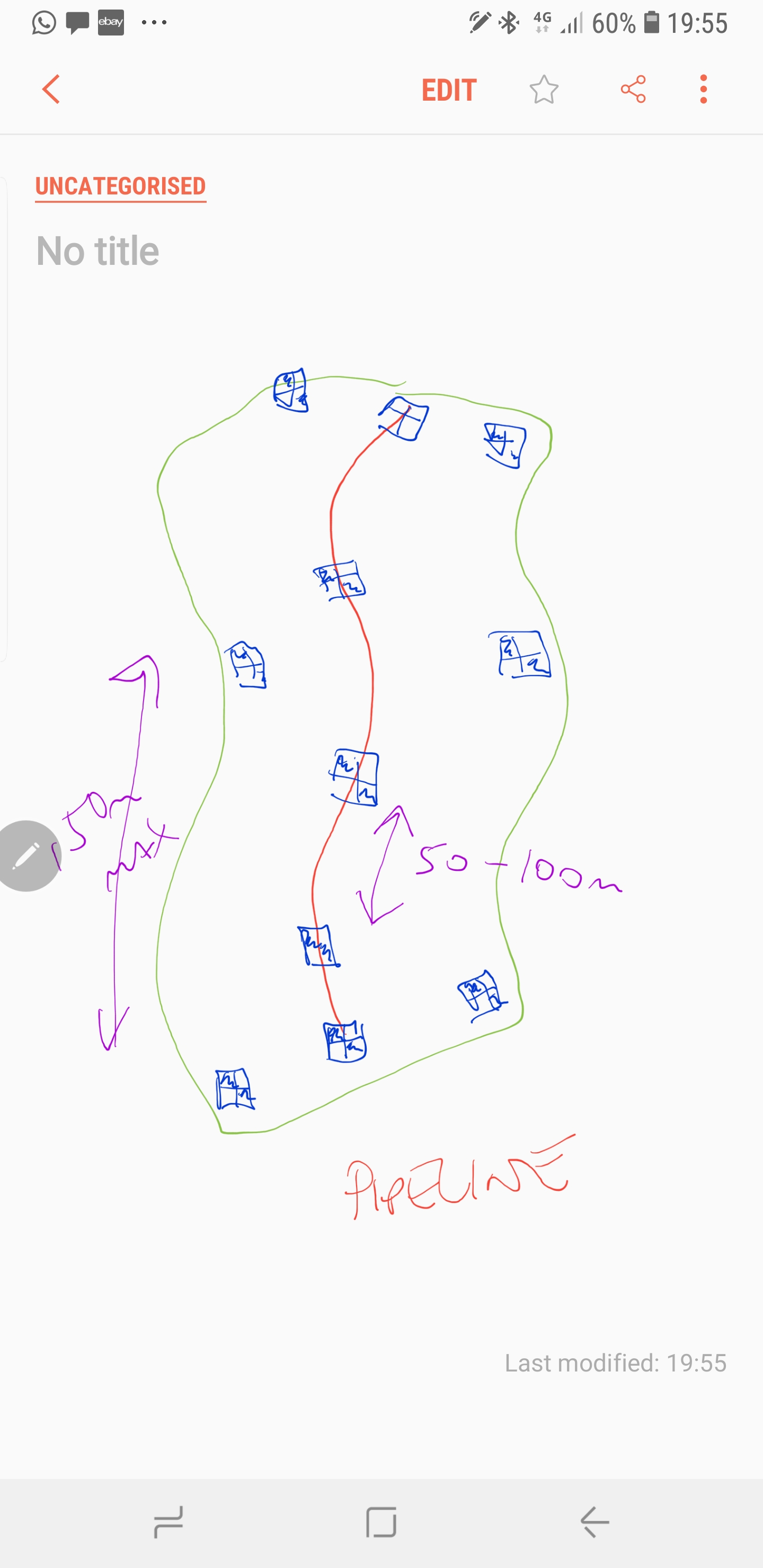
I would want to place at a minimum one GCP per 100m along the alignment of the proposed pipeline. Then also place additional control to the sides at the alternating chainages.
This would be a double zigzag i guess. But the point is concentrate GCP at area of interest, then add additiobal to brace for width etc.
Sudden changes in elevation will need extra GCP to be placed.
I carried out multiple test flights on 4 different quarries over a 18 month period before I was happy to only use the UAV instead of traditional GPS survey method.
During this period I would compare the different UAV derived surfaces against the GPS survey data and it can vary your results dramatically depending on how the GCP are placed. The Photogrammetry ‘results’ in the software are to be considered an indication of gross error only. These are not your true model accuracy. Land survey method relies on redundant observations to prove your accuracies… UAV based methods are no different.
For vegetated fields the best approach i have found is to take a few measurements with GPS in the field and then compare these to the Pointcloud, then an average thickness can be calculated amd applied to the field, this giving a ground surface.
I use an Emlid M+ on my Phantom4, with this system i will place a few GCP for verification. I also operate a Topcon Sirius Pro, this is a true RTK solution.
1 Like
Not to go off-topic, but just curious, what do you use for your vertical basis or reference to tie your GCPs to?
That makes more sense and apologies for missing where you said in addition… I doubt the pipeline is that curved and that would be another situation entirely. I merely stated the fact that a semi-straight row of GCP’s is not good.
Checkpoints are always a good idea and if you don’t do allot of work it is easy to spend the time to set a hundred GCP’s and take extra check shots, but my workload does not allow for that. If we are stating experience facts - I am a beta tester and have easily done over 50 tests flights with full back-end processing and analysis through several software integrations so numbers and deltas are easy to come by in a variety of scenarios. I have about 900 flights in the last 26 months so I have plenty of planning and processing time to share as well.
We use Topcon Hiper V’s and VR’s and they too are real RTK like the EMLID REACH RS2 (just so I don’t get in trouble for mentioning another manufacturer).
Chill, we are all sharing ideas and sharing experiences. I don’t mean to degrade you by stating a contrary opinion. You all can have fun with this one.
2 Likes
Leica GS10 Base, Leica GS14 Rover.
Base positioned using post processing against 5x CORS reference stations.
Use an Emlid RS with my M+ to simplify the PPK workflow.
1 Like
It’s all good! : )
I think @michaelL and @fin (and of course @Luke_Wijnberg!!! Is @bide a registered surveyor? Even if not, might as well be that genius!) bring a LOT here in terms of professional surveying which is VERY important to the drone / Emlid community.
1 Like
No worries, sketch only indicative.
Most of my work is corridor, i do alot of highway survey, also earthworks analysis.
I use laserscanning, Totalstation, GNSS, multirotor, fixedwing, mobilemapping among other tools. All this equipment has its place, but i see more misinformation in the UAV surveying sector than any other. Sub cm accuraccy… never going to happen!
3 Likes
Thanks for all the comments !
My customer for this does not require cm precision. ½ to 1 meter precision would be perfectly fine. This is more for the orthomap looking at the crops when they are ready to harvest for insurance-purposes 10 years from now. If he required cm precision, I would not have said yes to the assignment.
So, my main purpose for GCP’s is to prevent warping. My tests without any GCP’s (and no PPK, just the std gnss of a P4P) have shown a bending of the model from 1-15 meter over 1 km (the process does not seem to be deterministic).
I don’t see an advantage of using a fixed wing here. When I can’t legally fly BVLOS, I don’t see a point. I will have to split it into 4 legs to stay VLOS.
My test show no issues with tie-points, even after some very aggressive clean-up of the thin cloud. Currently using 85% front overlap, and 85% side overlap. Both 2 and 4 rows stitch without issues (if we don’t mention the bendy tendencies, fixed by using GCP’s).
Next tests will be GCP’s of some sort, maybe a mix of normal plates on the ground and the “lit-on-a-stick”-approach with the lit at the same height as the surrounding crops.
1 Like
Yeah the saying your model is generally accurate to 1-3x the ground sampling distance is very informative. The less tie points the greater uncertainty in the reconstruction and you are approaching the 3x range. A nice tight model with lots of tie points your are back in the 1x range but never less than your final ground sampling distance! You can’t be more accurate than your resolution. This is why it is so important to focus on quality flight plan for the terrain you are operating in even with GCPs in the mix.
3 Likes
What you were experiencing are very common issues when not using GCP’s and/or PPK. The first piece is known as a doming/bowling effect. Near-parallel flight plans do often exhibit this effect, and it is especially pronounced for narrow mapping regions (where maybe only 2 or 3 parallel paths are flown), e.g. road surveys. In my experience this can be alleviated to some degree by flying an additional flight at 100-120m to capture a broader view of the subject that will then aid the stitching process. The only other way I have heard to get rid of it is to run curved lanes and I have not seen a flight app that will do that although you can find a ton of scientific documentation about the problem.
The second issue is that the P4P (and maybe others) use the barometer for maintaining elevation. If you look at a profile you will see a slight decrease in elevation on just about every map. I don’t know for sure why this is, but I am fairly certain that it has something to do with the temperature of the drone.
2 Likes
So potentially doing some 20% overlap shots perpendicular (or maybe 45 deg?) to the long lines would help without GCP’s ?
I believe this is caused by the temperature increase as you use the drone. @Simon_Allen has done thorough research in this regard. I never understood why my models tilted at the last few flights on long mapping days but his work taught me much.
Law of large numbers. More data for the algorithm the better it resolves the uncertainty. Same reason why more readings over long periods for static processing produces more confident results.
@michaelL sorry missed your last sentence…
3 Likes
Yes. I see this most often when people fly too low trying to get resolution and not using enough overlaps. Personally I don’t think it is good to go less than 80% when flying under 65m, but oblique images will help. Problem with obliques though is that they are not very good for GCP’s which is why I suggest just one quick high flight.
1 Like
For geology work more geared capturing faces in variable terrain I have found 30 degree oblique shots produces quality results. Litchi makes this easy to accomplish and the other apps I believe can handle such a flight plan. I am not sure the gains you will see in crop land. It helps me reconstruct trees for sure though which are always inherently difficult and in in trees environments I have to fly at solar noon to reduce shadowing. Oh the intricacies! Time to strap a velodyne puck to my next rig!
1 Like
My testflight were done at 90 meters. Wanted to get the crops to be more of a texture instead of being individual plants. That seemed to have worked.
Problem with the 90 meters is that I got 10 meters left until the legal limit 
1 Like
Watch out for crop dusters too! Come out of nowhere like a bat out of hell on acid 
4 Likes
Totally. Just did a flight like that this morning. Litchi is amazing. When you say 30deg do you mean up or down? I am used to seeing horizon as zero… so mine was 60deg down.
1 Like
60 down i would also use for oblique.
Doing a flight in length and width directions will aid in the processing.
If you are only looking for 1m accuracy then the GCP on a stick might not be too bad. Its going to be better than nothing. If you have it at the level of the top of crops then it should be fine for low accuraccy mapping.
If its only the Ortho image you need then it should be absolutely fine.
Go wider… the distortions get worse towards the edges of your map.
Most of my work I am aiming for 50 to 75mm accuraccy so the GCP placement becomes very important.
It is possible to get accuracy down to 15mm, but this requires Totalstation GCP positioning and flying at around 35m with the P4P using double grid oblique and a nadir flight at 50m 80% min overlap.
2 Likes