



since the reach support many types of GNSS .
is there any difference(accuracy) whether i only use gps or gps and beidou (for instance).
A fix with GPS only vs GPS and Beidou should be of the same accuracy.
What causes different level of quality for a fix is signals you get from the satellite, not the system you use.
Ex. Multipath, noice is factors that could degrad signal quality.
But, if one system is lacking satellites in your area, adding another might give your gps/gnss a better chance of getting fix, and a higher AR.
appreciate your help.
can you tell me ,how can i make sure that the base position is fixed with rover (rover is integrated with Pixhawk, base create a wifi hotspot and missionplanner is setted as your docs’ instruction)
Base doesn`t get fix.
It sends correction data about its position and satellite info to rover, and then rover can determined whether rover has enough good data to get/apply fix.
got it thanks ~~
can you tell me the accuracy of REACH ?
the sentence of “You either need to place base station on a point with known coordinate or determine it by post-processing base against a reference station in static mode. It is better if the station is within 100km range, but longer range might work as well.” shows that we can post-processing base against a reference station in static mode , but how , any solutions ?
since we live in hk of china , we have lots of GCP in hk government website ,and for free , we want to make use of it .
Not sure i understod you question. The basic of accurat measure with a gps/gnss device, is that it has to recive correction data from somewhere to achieve cm accuracy in RTK mode. Now, you can use a singel device, set it to static mode and log for some periode and then download and work post process at home. But also here you need to apply correction data in some form to get cm accuracy.
The 10km baseline is no problem to stretch all the way to around the world. But the further away rover is from base, the greater the difference in atmospheric condition is at those two places and the greater there error in accuracy you get.
With static and long range post process, you have longer recording time and increasing the accuracy and able to apply correction to counter measure the long range
Postprocessing is basically a unit over a known point logging raw, and another somewhere over a point you like to have coordinates , and also recording raw. Then you download both and post process it with RTKlib
Some good info here
http://www.trimble.com/OEM_ReceiverHelp/V4.44/en/PositionModes_CriticalFactorsRTK.html
Hope this gives you a glue.
Most of this is from what i have read and learned. Please feel free to correct me.
sorry for my bad english.
in hongkong ,there has lots of free RTKs (not gcp , my bad sorry .)
you can get the correction date form their website . we have 2 reach , one as base(Kinematic model) , one as rover (Kinematic model)
base reach connect to the mission planner, rover connect to the pixhawk , the rover receive the correction date from the base by radio(3dr)
1: how i can make sure the rover is fixed with base ?
2: i want to make use of the free correction date form hk website , any suggestions ?
3: for the postprocess, if i can get the correction date from somewhere (no matter how i can get , a known point) , i only need one reach(rover) , set it to static mode and log for some periode and then download and work post process,
same procedure of doc instruction ,right ? make sure the formate is correct .
Ah ok, you are flying a reach module.
The way i understand to go is do this postprocessing way. Not RTK, but PPK (Post-Processing Kinematic)
The workflow for this is not my area. You might wanna search for @Luke_Wijnberg on this fora find stuff he posted.
1: how i can make sure the rover is fixed with base ?
Maybe here
2: i want to make use of the free correction date form hk website , any suggestions ?
Check what service they provide. VRS? Option to upload data to process or download stream or timespan and Rinex version
3: for the postprocess, if i can get the correction date from somewhere (no matter how i can get , a known point) , i only need one reach(rover) , set it to static mode and log for some periode and then download and work post process,same procedure of doc instruction ,right ? make sure the formate is correct .
Yes
2: i want to make use of the free correction date form hk website , any suggestions ?
Check what service they provide. VRS? Option to upload data to process or download stream or timespan and Rinex version
here is what they have provided, sorry i am newbee on this field .
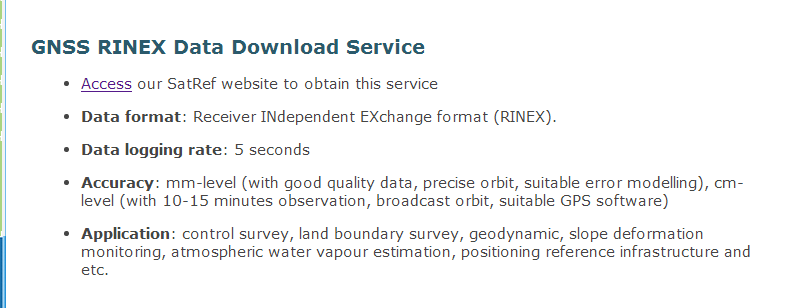
GNSS RINEX Data Download Service
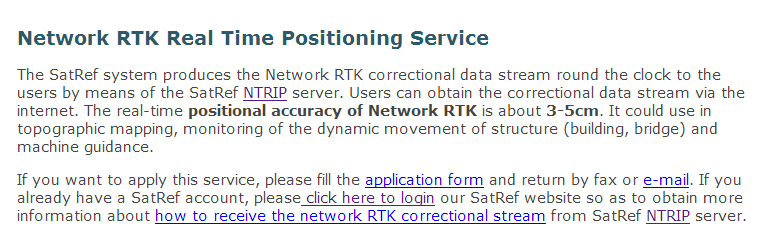
Network RTK Real Time Positioning Service
Differential GNSS Real Time Positioning Service

I would propably go for VRS. And set your base to log input correction with phone as hotspot.
Find it here
http://www.geodetic.gov.hk/smo/gsi/programs/en/GSK/FAQ/faq_NetworkRTK.htm
If this is not possible, download stream here
https://www.geodetic.gov.hk/smo/en/downv.aspx
If the above link doesnt work, try this
http://www.geodetic.gov.hk/smo/gsi/programs/en/GSS/satref/RINEX_download.htm
dear TB_RTK,
i read docs in your website ,here is what iam going to do , i use only one reach as rover ,receive the correction date from hk VRS , and do the correction at realtime .
we can create a wifi hotspot in uav, and make reach(rover connect to it ), and set its setting like the pic below .

but i dont know what should i fill in the mount point textbox .
by using the pic below , i do know the ipaddress port and i have a userName and PWD, , but i dont have the mount point
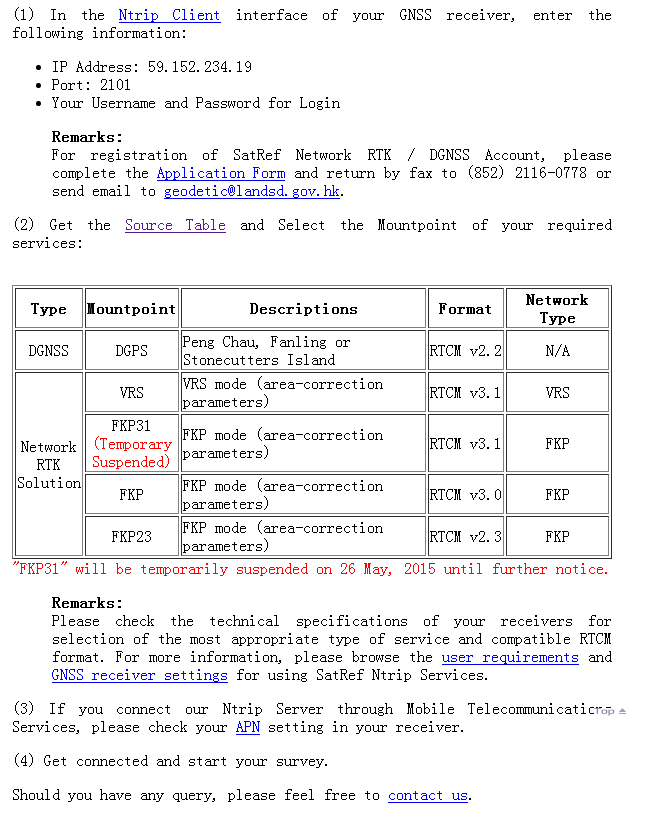
In mount point field you should put mount point name like DGPS/VRS/FKP31/FKP/FKP32 from your pic.
And if you update ReachView there will be dropdown menu with mount points 
1 Like
can you tell me the accuracy of reach ? with the condition fixed
In one of your post, it states 3-5cm accuracy in RTK mode, and that should reach be able to do.
got it , thanks ~~~
dear guys,
does reach Inbuilt IMU ? if dones, can you tell me the specifitions of it ? if not , does it Allow External IMU?
dear guys,
does reach Inbuilt IMU ? if dones, can you tell me the specifitions of it ? if not , does it Allow External IMU?