I’ve been using Navio2 on a drone with Ardupilot and without it.
In flights without Ardupilot, I designed a nonlinear low-level control and it performs pretty good. I used the C++ examples to access the hardware.
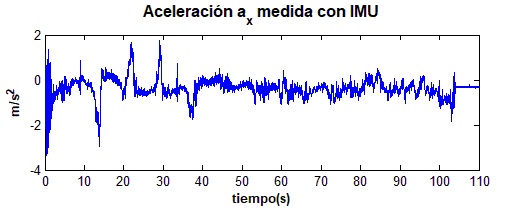
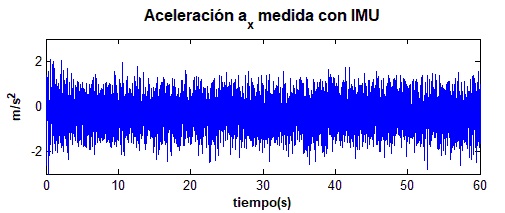
I notice when fly with Ardupilot, the accelerometer readings are completely filtered (using ROS to acquire them), but without Ardupilot are completely noisy due to the motors (from the C++ 9DOF IMU example).
Is there a way to get the accelerometer readings filtered from the 9DOF IMU or AHRS examples or something?
I upload some graphics of the readings filtered and not filtered to compare and to notice that the not filtered are completely useless.
I’m afraid there is no ready solution for acquiring filtered accelerometer readings without Ardupilot.
As far as I know, Ardupilot uses Kalman filters, so probably you can apply some math to our examples and get about similar results. However, it seems to be not an easy task.
By the way, why using ROS doesn’t fit in your desired setup?
Fist of all, I need the accelerometer readings for parameter estimation, specifically translational velocity estimation. For this purpose I need to use a specific low-level controller. Ardupilot implements another type of controller (nested PIDs as far as I know) and is not an option trying to modify a program of 700k lines of code.
I’ve used Parrot AR Drone 2.0 with ROS controlling it from a computer using ardrone_autonomy driver with commands like takeoff, land, etc. and moving it with the desired velocities. Can I do that with Navio2?
Fist of all, I need the accelerometer readings for parameter estimation, specifically translational velocity estimation. For this purpose I need to use a specific low-level controller. Ardupilot implements another type of controller (nested PIDs as far as I know) and is not an option trying to modify a program of 700k lines of code.
We provide only an ArduPilot solution for this, so I hardly can recommend you anything else.
I’ve used Parrot AR Drone 2.0 with ROS controlling it from a computer using ardrone_autonomy driver with commands like takeoff, land, etc. and moving it with the desired velocities. Can I do that with Navio2?
Do you want to install ROS on RPi? Could you please tell a little more about it?