Hi,
I’ve been trying to configure my Navio2 / Pi3 B for a new singlecopter frame.
The frame has the board pointing down and with 45 degrees of roll (once pointing down) or if you like 45 degrees on the Y axis.
Within MP there are several pre-set options for AHRS_ORIENTATION with the closest one to what I want being 34. This is Roll 180 and Pitch 270.
With the Board pointing down to the ground, everything works in the right direction and the horizon is level.
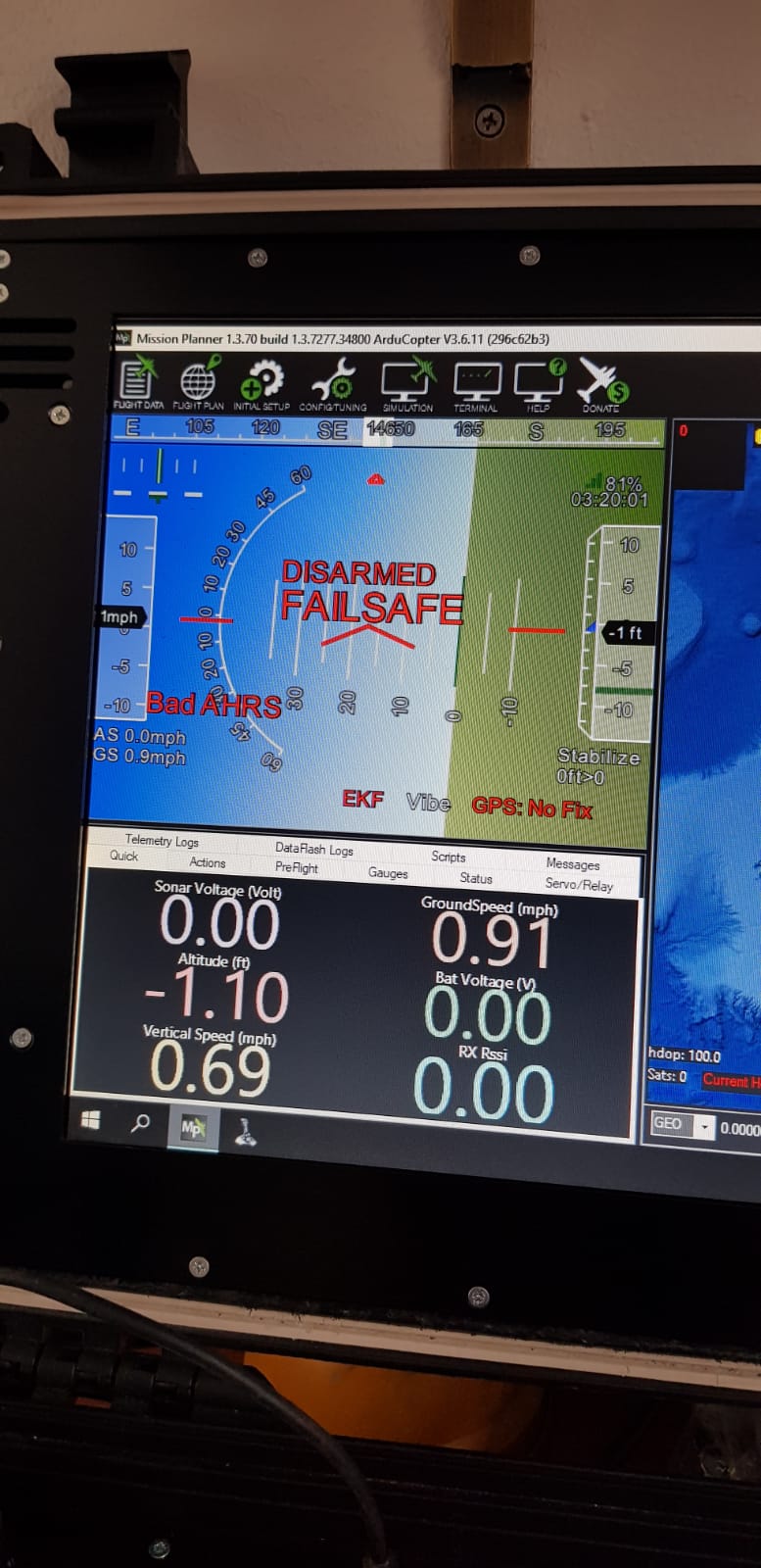
When I try to use the custom AHRS settings the orientation is way out.
I’ve tried calibrating the Accelerometer but it fails every time and that is with AHRS set to zero, essentially a normal flight orientation. It fails every time and I have even fixed my board to a cube and set it on the desk to ensure that it’s exactly at 90 degrees on each calibration and doesn’t move.
With AHRS_ORIENTATION set to Zero, it sits nice and level.
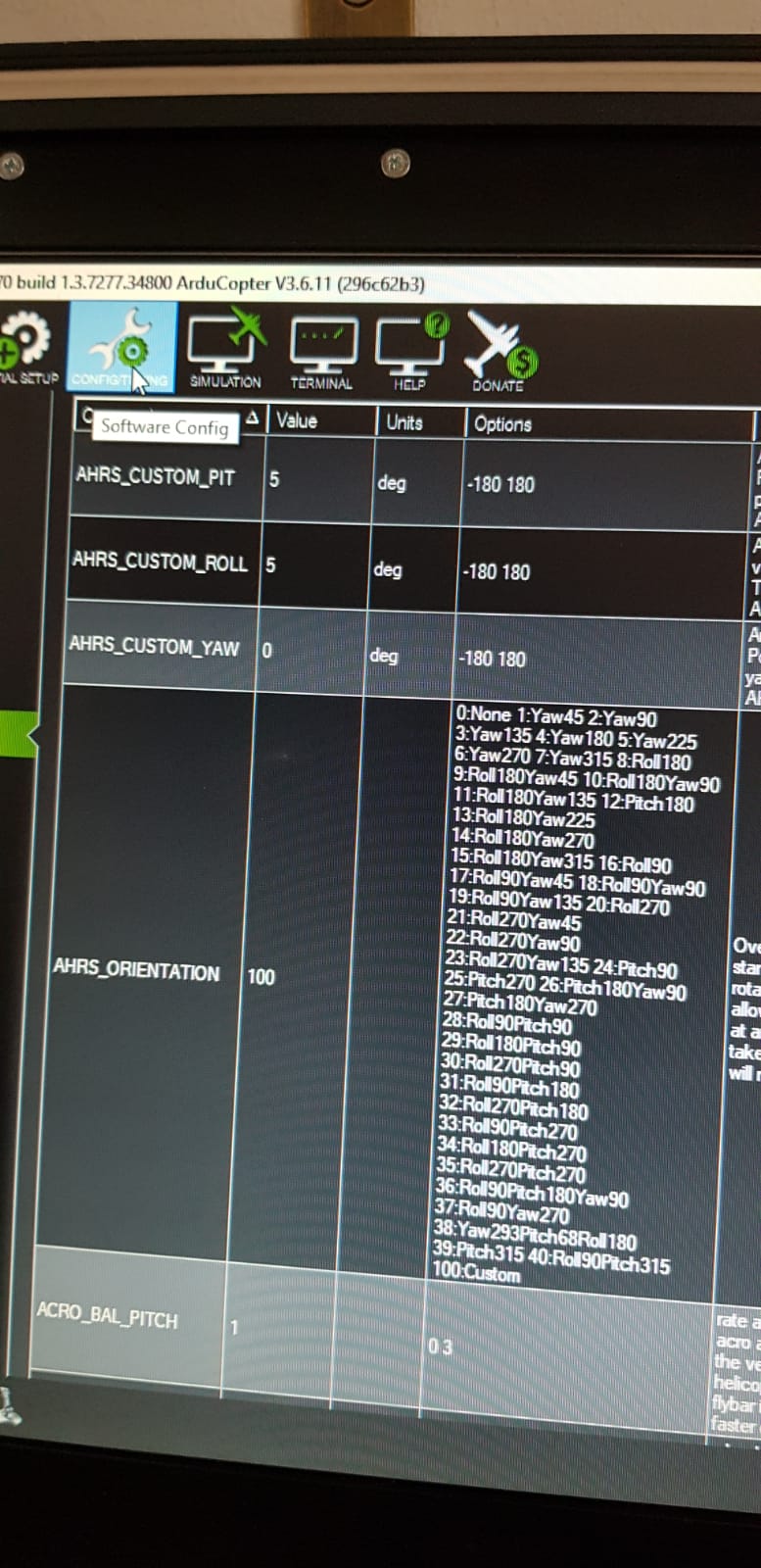
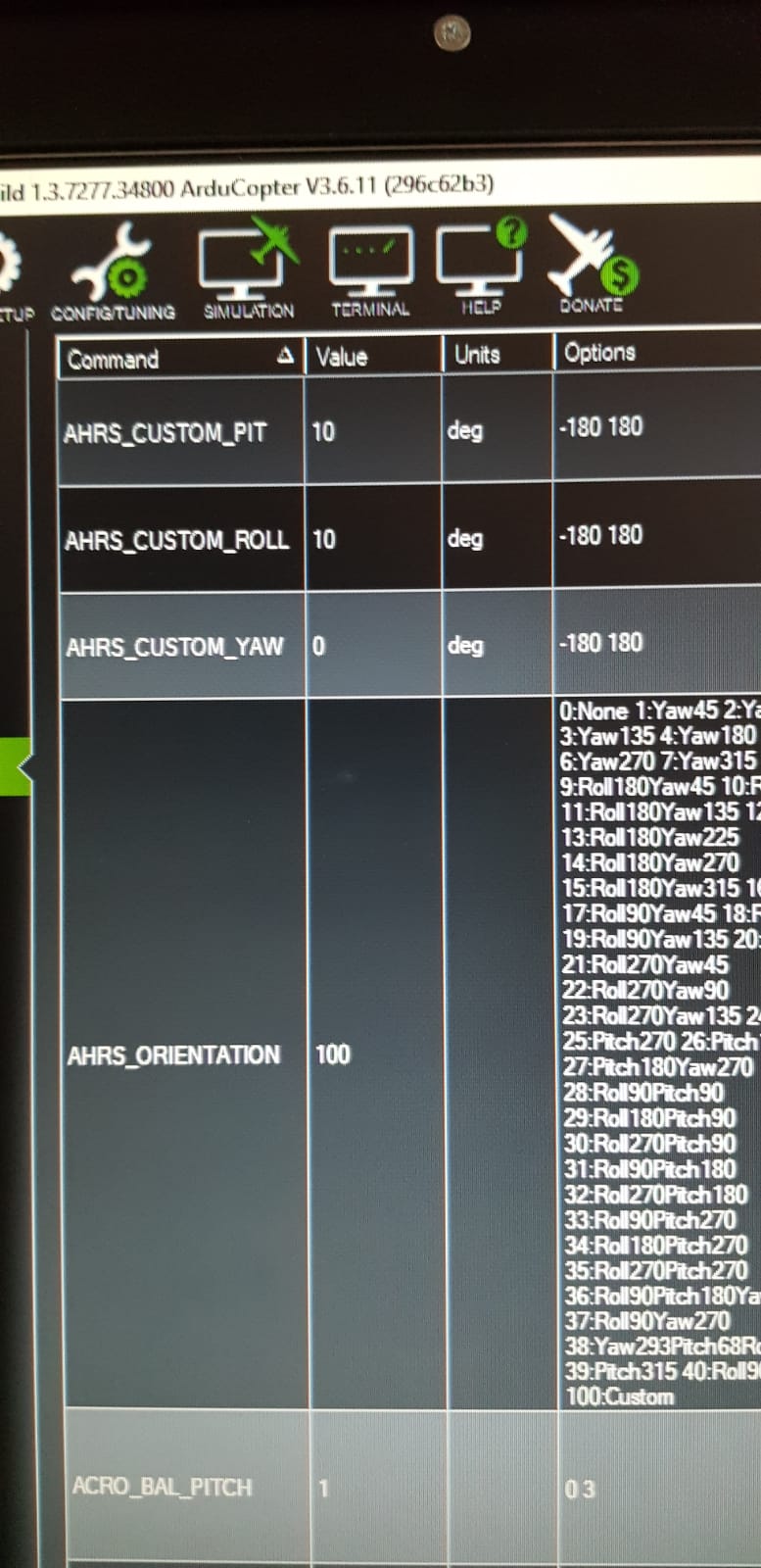
If I set AHRS_ORIENTATION to 100 (Custom) and set AHRS_CUSTOM_ROLL to 10 and AHRS_CUSTOM_PITCH to 10… the pitch on MP goes to -20 and roll to -35 to -40

If I then set AHRS_CUSTOM_ROLL to 5 and AHRS_CUSTOM_PITCH to 5…