Hey everyone
i’m just getting started with my EMLID reach equipment but i’m having problems getting my data to work correctly.
I recently did a job at a water treatment plant and after PPK my data seemed to be skewed north east by approximately 6 meters. The equipment I used was a
-EMLID Reach rs as the base station
-EMLID Reach as the rover
-Aircraft was an MD4-1000
-Camera sony a7r2
All equipment was using the latest firmware
The camera was sending time mark signals to the rover unit via a hot shoe attachment.
The data was then put through RTKpost to generate a solution
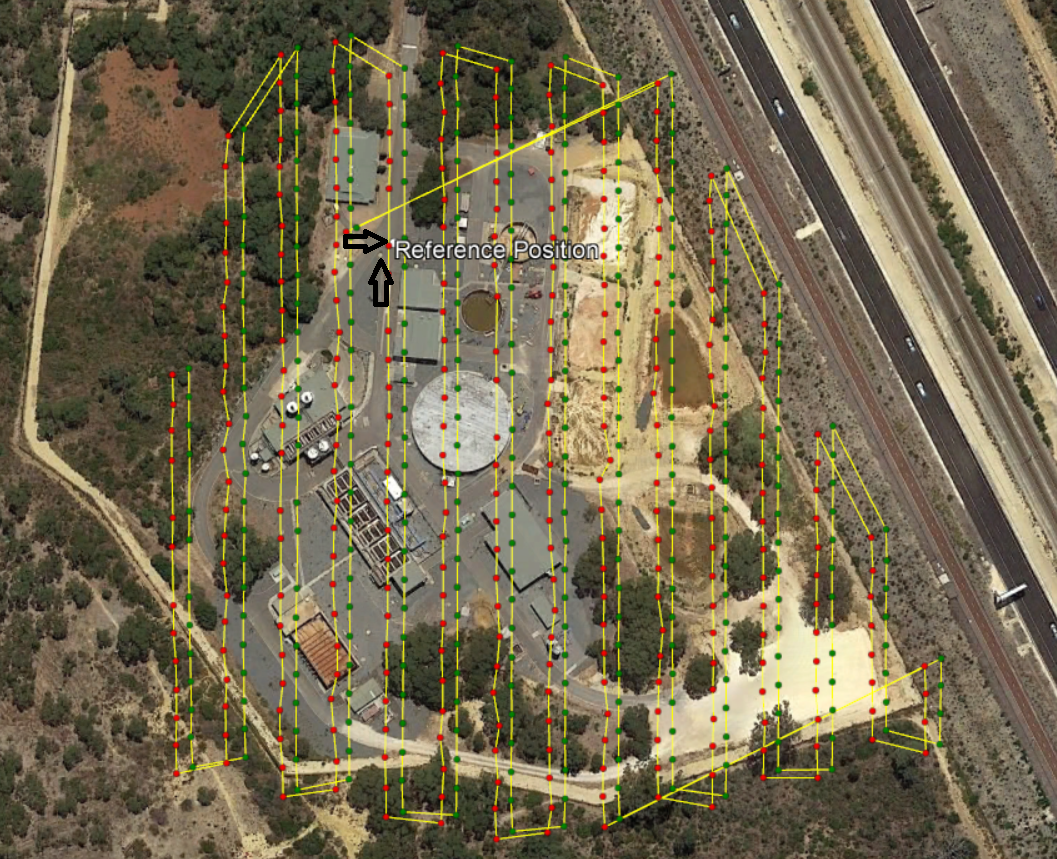
The Base was set up on top of a drain cover shown next to the bottom arrow but the reference position wound up next to the top arrow.
I am at a loss as to what my problem could possibly be, if anyone is able or willing to help me it would be much appreciated. Also if anyone needs more information about my procedures and setup I am happy to provide that information.
Thankyou.
For sure it is a base station coordinate error. So that could be user-introduced, or it could be a quirk with RTKpost, or maybe what you are lining up to is incorrect.
Tell us how you got your base coordinate, what base coordinate setting you used in RTKpost, what version of RTKpost you have, and what data you are comparing your survey against to know that it is offset.
The base was set to get its coordinate via average single position, The RTKpost setting for the base was set to RINEX header position.
The RTK post version is 2.4.3 emlid b28
The client provided an accurate technical drawing of the site that was accurate to around 5cm, I also compared my data to google earth.
So, it would have been good to write down that averaged single position your base created. It would have been off too, but by a lesser amount.
Also, if there is no reference point nearby that is related to the WGS84 ellipsoid or a geoid, then it is you who is going create a reference point and decide what the coordinates are (and not a relative site plan or Google Earth).
Thanks for your feedback and help.
But i’m still having trouble following what exactly iv’e done wrong, the site drawing and google earth use WGS84 so shouldn’t everything somewhat match?
Also when I view the pos files from the rover and base without ppk they match the client’s drawing, google earth and the points from the drone’s flight log quite well. This leads me to believe i’m somehow introducing the 6 meter shift in post processing, but I still have no idea how.
A Reach device working alone can achieve 2.5m accuracy relative to the WGS84 ellipsoid.
If you averaged your base position for about 5 minutes before surveying, you would get that same accuracy.
Your rover, with PPK processing could achieve 8mm precision relative to your base
(within 1km of the base station)
So, if you averaged your base coordinate beforehand, and then had a perfect survey, you could expect 8mm precision for your points and your whole survey would be aligned to the WGS84 ellipsoid within about 2.5m
How can it get better than that, you ask? (In order of preference)
Place your base on a point of known coordinates, such as a survey marker with published coordinates.
Your survey will be perfectly aligned to that marker, and your individual points could have 7mm+1mm/km precision.
Survey from a point of known coordinates, as above, to a new reference point on site.
Your reference point could be as precise as 7mm+1mm/km from the survey marker.
Then survey from that reference point and your points could as precise as 8mm from it.
Your individual points then possibly being 15mm+1mm/km from the survey marker.
Find a CORS or NTRIP correction service where you can get real-time or historical observation data.
Set your base on a reference point on site, and log continuously while surveying.
Process the your base log (as a rover) against the correction service (as a base) to get a base coordinate result that is about 10cm accuracy to the geoid/ellipsoid of the correction service.
Then your survey would be aligned to that geoid/ellipsoid within about 10cm and your points could be within about 8mm of the reference point.
Make a reference point on site and let the base station collect data there for at least 4 hours.
Submit your log files to a PPP service and get a result with about 30cm accuracy relative to the reference geoid/ellipsoid of the PPP service.
Numbers were pulled from this handy chart in the documentation:
Disclaimer that in real life situations you may not achieve the published accuracy because of numerous factors that affect it - some controllable and some uncontrollable.