



Hi,
I’m having some trouble to send correction input from base to rover using 3dr radio, although it is working fine if I use TCP (i.e. gray bars are shown and fixed solution is computed).
Here is my setup:
BASE
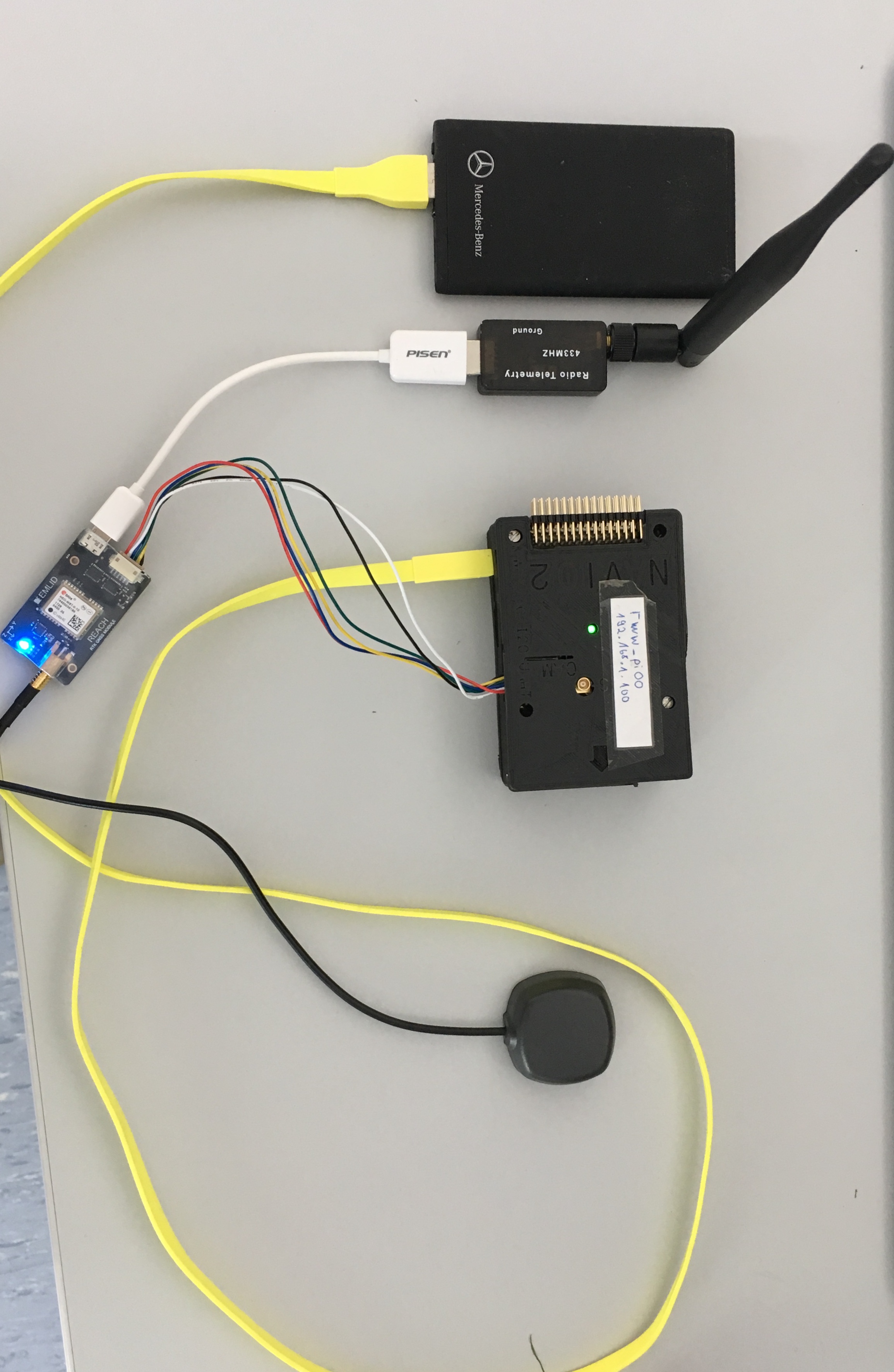
- ground radio telemtry with 433 MHz is connected to emlid reach via usb otg
- emlid board itself is connected to navio2 which is power by external battery
ROVER
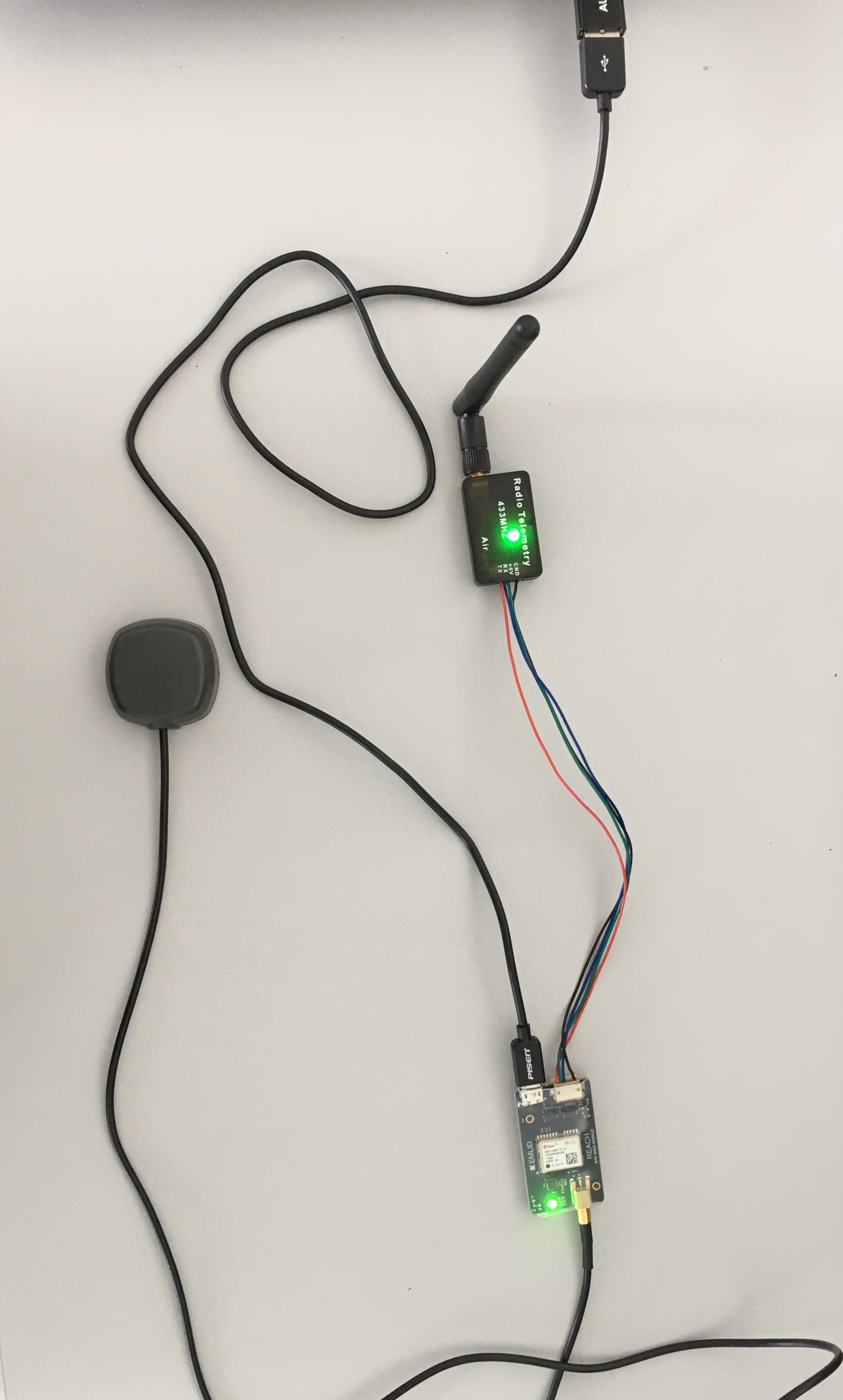
- air radio telemetry with 433 MHz is conned to emlid reach via DF13 connector according to the connection diagram (https://docs.emlid.com/reach/hardware-integration/)
- emlid board itself is connected to a pc via usb
As I mentioned before TCP communication between base and rover works fine.
In order to communicate via radio telemetry I set Base Mode to the following settings
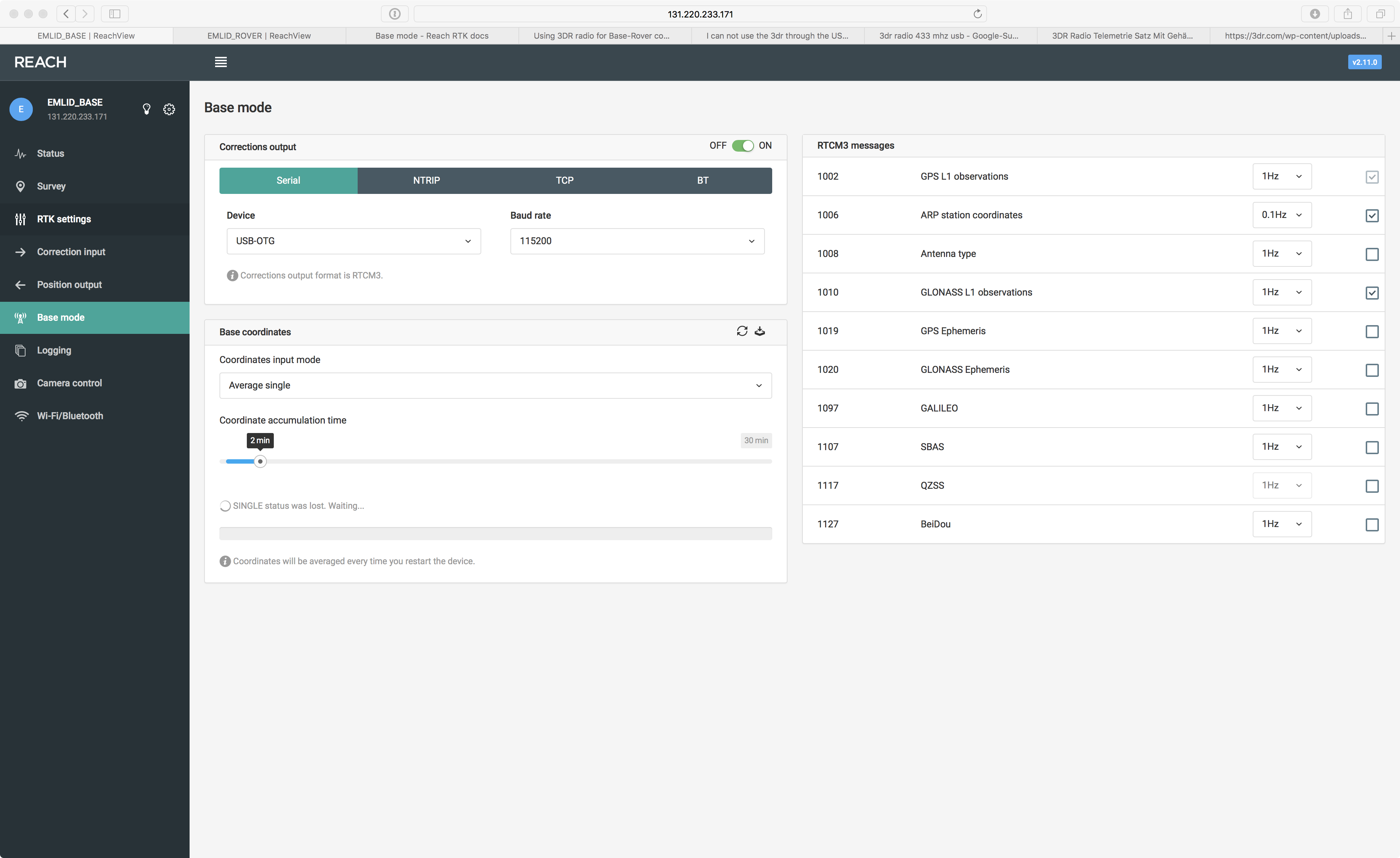
- ground radio telemetry status led is blinking red ( which means transmitting data) and solid green (which means link established) [according to https://3dr.com/wp-content/uploads/2013/10/3DR-Radio-V2-doc1.pdf]
- I tried different baud rates (57600 and 115200) but none of them is working
- Position Output and Correction Input are turned off
Settings for Rover looks the following:
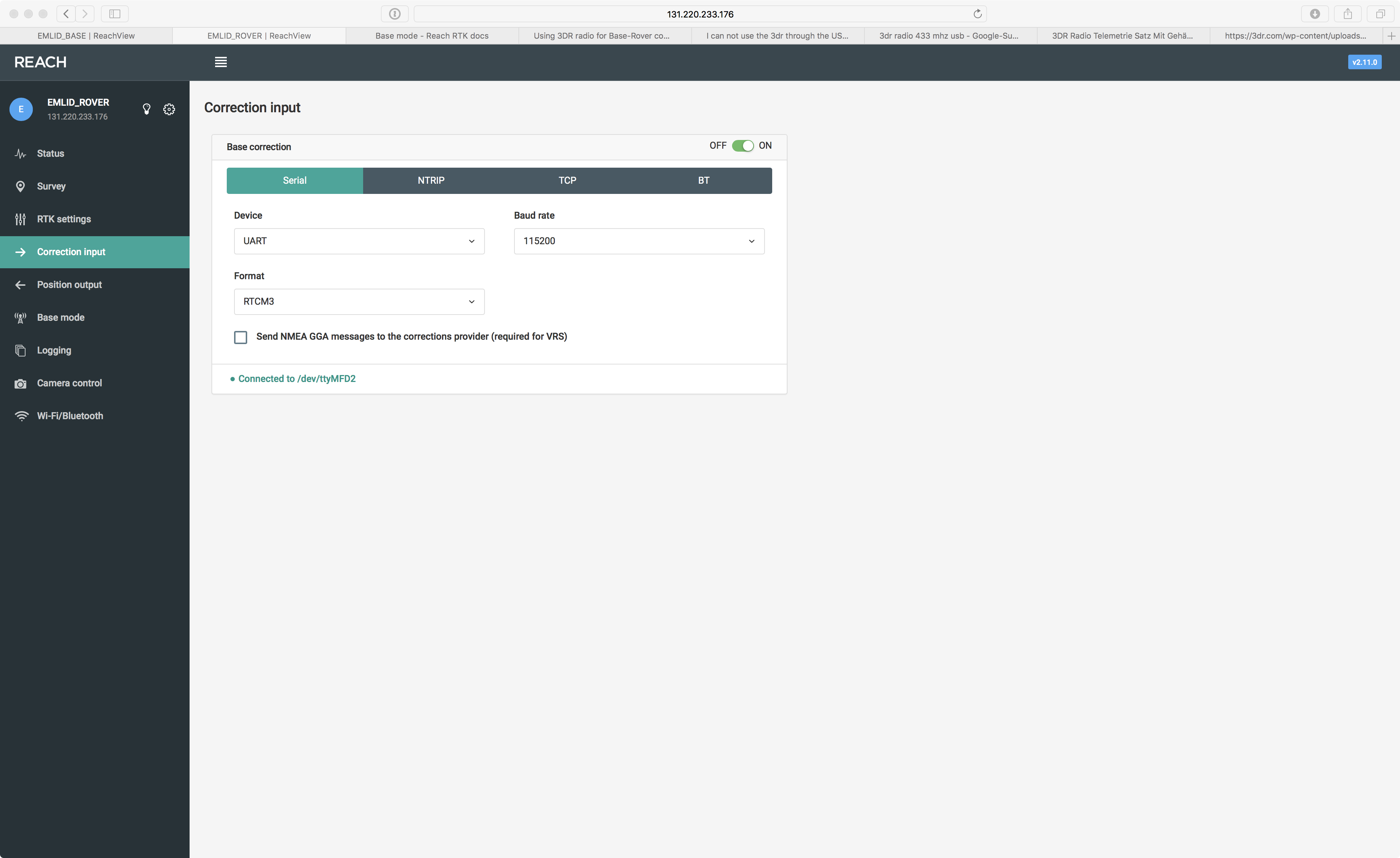
- air radio telemetry status led is solid green as well
- Base Mode and Position Output are turned off
For me it looks like base is sending correction data but it is somehow no properly recieved by the rover.
ReachView version is up to date v2.11.0.
Many thanks in advance for your help.