I have brought this up some time ago but I am revisiting this again. There is only one thing that sits in the way of VERY efficient and accurate PPK flights on the Inspire 2, M200 series, and M600. And the single problem is creating the event file in the Emlid M+ (or M2).
There are two ways of doing this. Have an adapter that fits between gimbal mount and the gimbal that sends a shutter signal to the Emlid GPS each time the shutter is actuated. This seems so simple but the only company I have found that has it is part of a turn key solution to put on the drone and it is expensive as heck! $4700. https://www.topodrone.org/product/kits/m200-uk/m200-x4s-uk-ppk/
Option 2 is simply bypassing the SDK aspect of it and using the card reader to trigger the event. There is one company called Loki that also has their “turn key” solution for this. The only thing we need for the Emlid M+ to turn a host of DJI drones into PPK power houses is someone to make a gimbal adapter or someone to manufacturer a SD cable that will send the low voltage signal to the Emlid M+ when the card is written. This would be VERY cost effective and should be very easy to make.
Video showing the Loki install
I would have to research again but there are two pins on the SD card that can be used to send the write signal. Any help on this subject will be appreciated.
I would love my Inspire 2 and M200 to become a sweet PPK flying machine all the time.
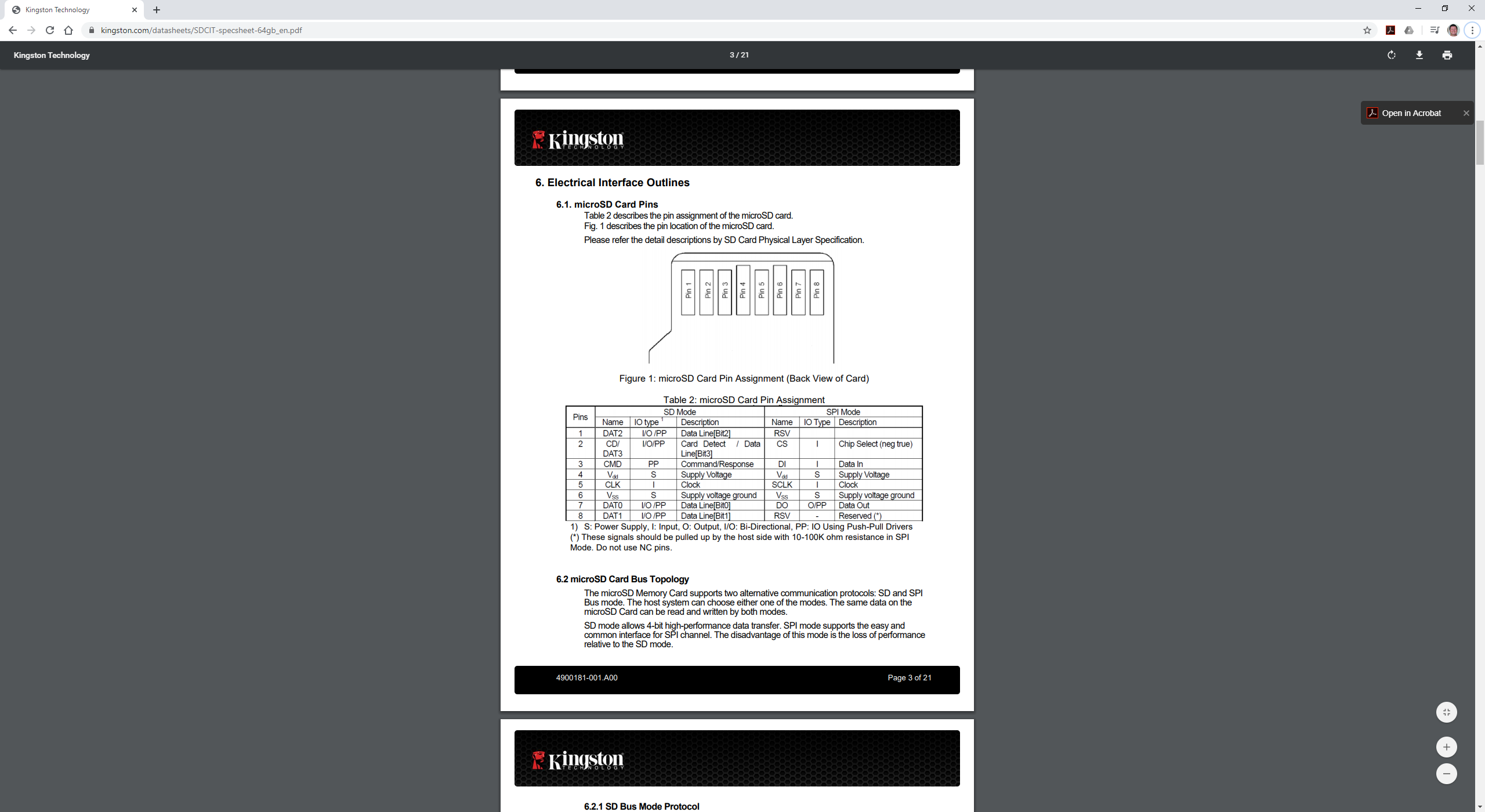
I found this pin out chart for the SD card. Not sure if the #4 and #6 would be the pins to run to the M+? Seems you could use an SD Card “extender” cable. Then piggy back off the 4,6 pin to M+ for event triggering.
The DJI SDK has no knowledge of when the shutter actually takes the image with .1 second or so. If you want millisecond timing you have to get a lot closer to the camera hardware than the SDK. Even timing it off the shutter like the PPK units do isn’t actually that close. It might be with 20 milliseconds.
I don’t know what flight software you are using, but that is a factor as well. From what I have seen Map Pilot is the only one that reports in single-digit milliseconds. Most others are in the 30-50ms range. It doesn’t sound like a big deal initially, but if you are trying to get centimeter absolute accuracy you won’t without GCPs, though your data will be accurate in relative terms. This doesn’t even take into account the absolute accuracy of the GNSS.
I guess it all depends on your intent. If you just want maps that are relative to each other then it probably doesn’t matter much, but if your are trying to do analysis using other design software then you will have to shift the data to ensure accurate measurements in relation to the design data.
thanks for that info. I had no idea on the SDK>shutter timing. I am not sure how the TopoDrone system is getting the timing signal for their setup. The Loki system seems like we should be able to accomplish the same setup with the Emlid. We just need the cable.
I have been using DD for planing and been working on learning UgCS as it has some nice features. For larger areas, I simply prefer to fly the I2 or M200 for visibility. I want to have PPK abilities on them for when relative accuracy is all that is needed. For me it makes no sense that there is not an easy solution when the solution is very simple (using the SD cable method).
Not a whole lot here, but similar was discussed a while ago. If you search the forum “inspire matrice topodrone” you might find some other useful info.
*Edit, I just realized the other only mentioned the X4s, but was primarily about the P4P.