



Hello, I am writing to ask a question about this subject “if you want to work in RTK, you may need 2 LoRa radios for sending and receiving corrections.” Right now I have two m+ rtk modules and 2 emlid loras. This system will also work with ardupilot while communicating with my RTKs. I don’t want to use the telemetry of my drone working with Ardupilot for this communication. Can I transfer data with lora radio at the same time while connecting to Mission Plannera via telemetry?
Also, how should I set the base output inputs and other necessary settings after I plug 2 lora radios into two separate m+?
Hi @res,
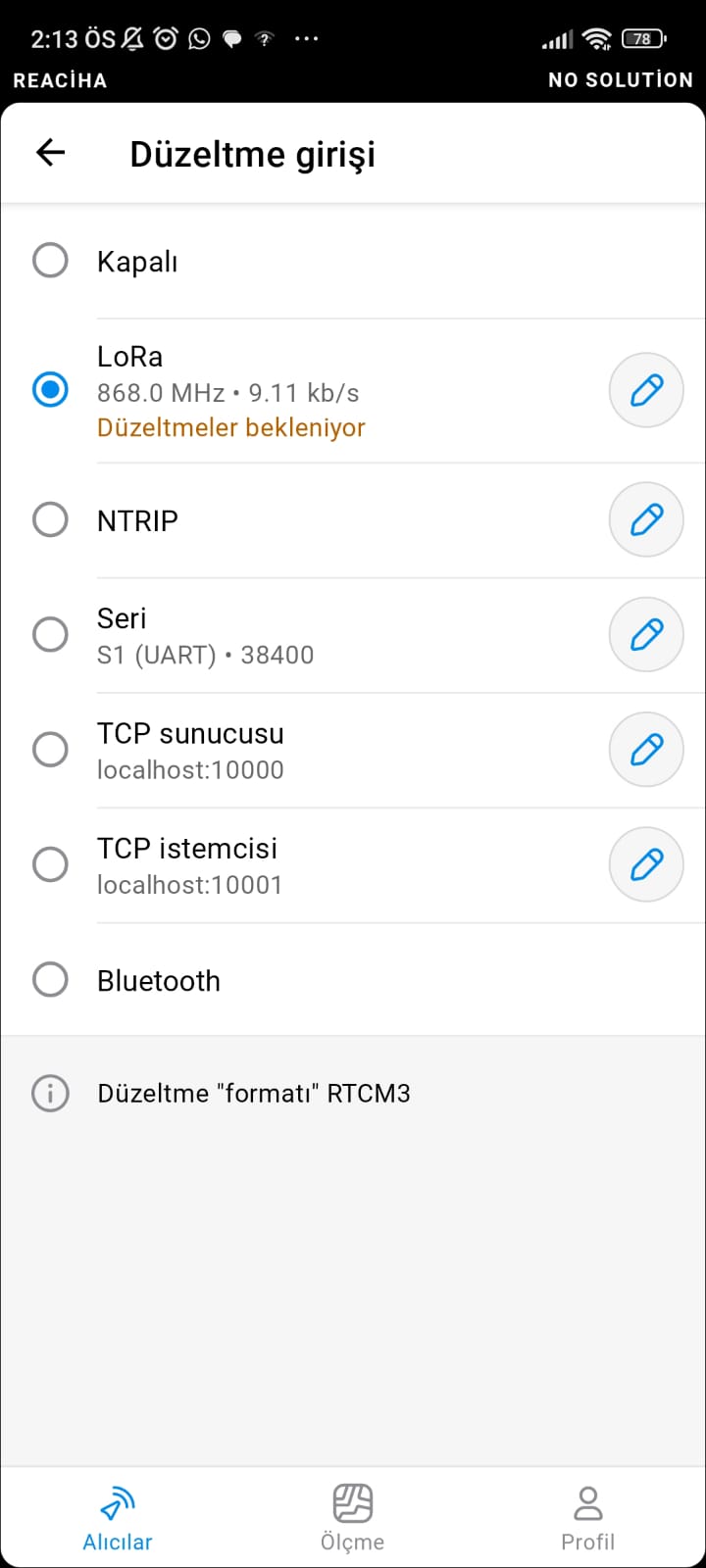
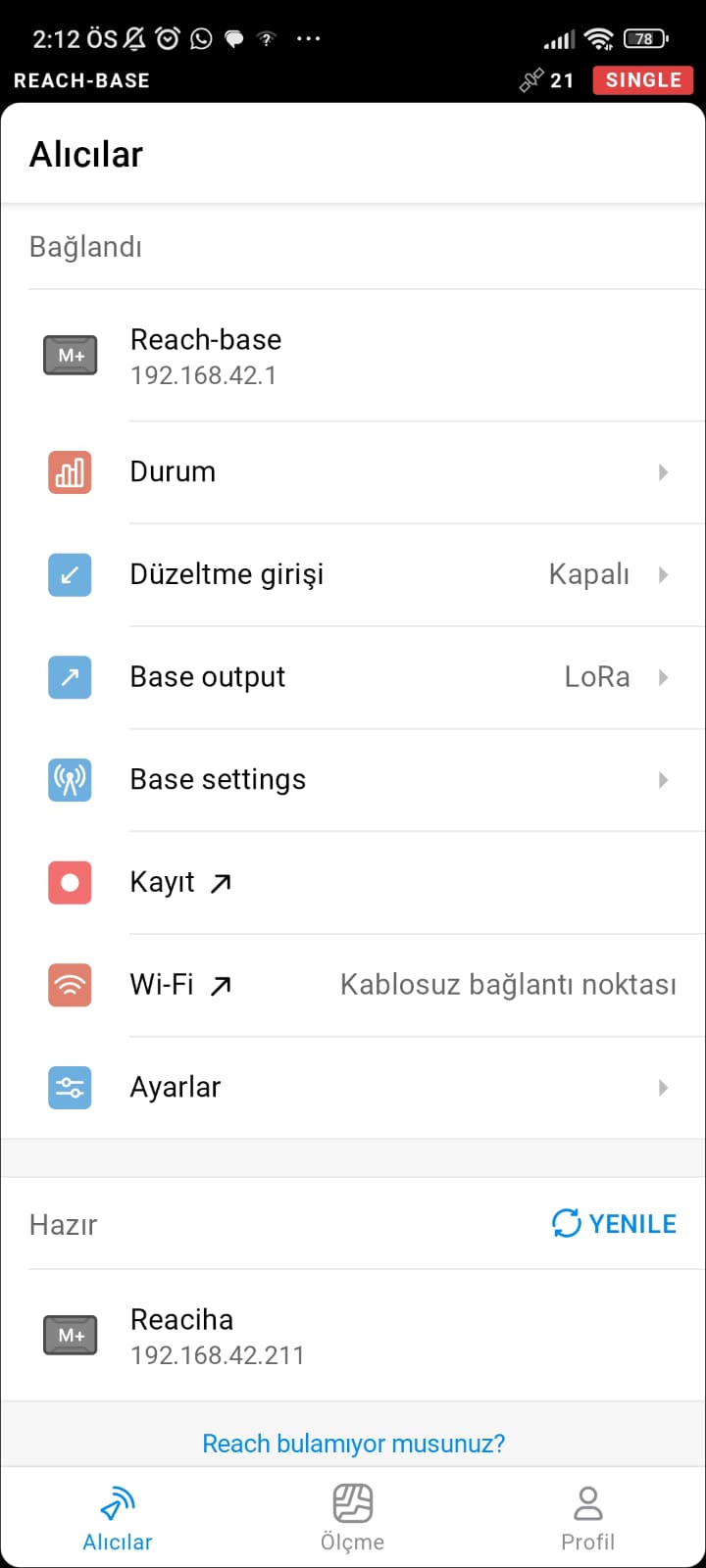
The configuration from Reach side will look the following way. Base and rover are configured to transmit and receive, respectively, LoRa corrections through the Base output and Correction input. The rover outputs its enhanced precise coordinates to autopilot for RTK guidance. Mission Planner telemetry between GCS and autopilot is configured separately.
But please note that LoRa radio is quite sensitive to physical obstacles and altitude differences. Hence, this configuration will work in a direct line of sight between receivers and when the drone flies relatively low to the surface. I can hardly tell exact values of drone’s flight height because they strictly depend on the environmental conditions.
I cannot use this system( ArduPilot Integration | RTK Modules ) when I am going to integrate it into ardupilot because I have set my base output and rover input to lora. How can I integrate the system?

Hi @res,
Your rover doesn’t track satellites according to the screenshot (No solution status). So, either it’s placed indoors, or the antenna isn’t attached.
To start receiving corrections, the rover has to start observing satellites. So, you need to either attach the antenna, or place the receiver outdoors.
So how do I solve this situation
Hi @res,
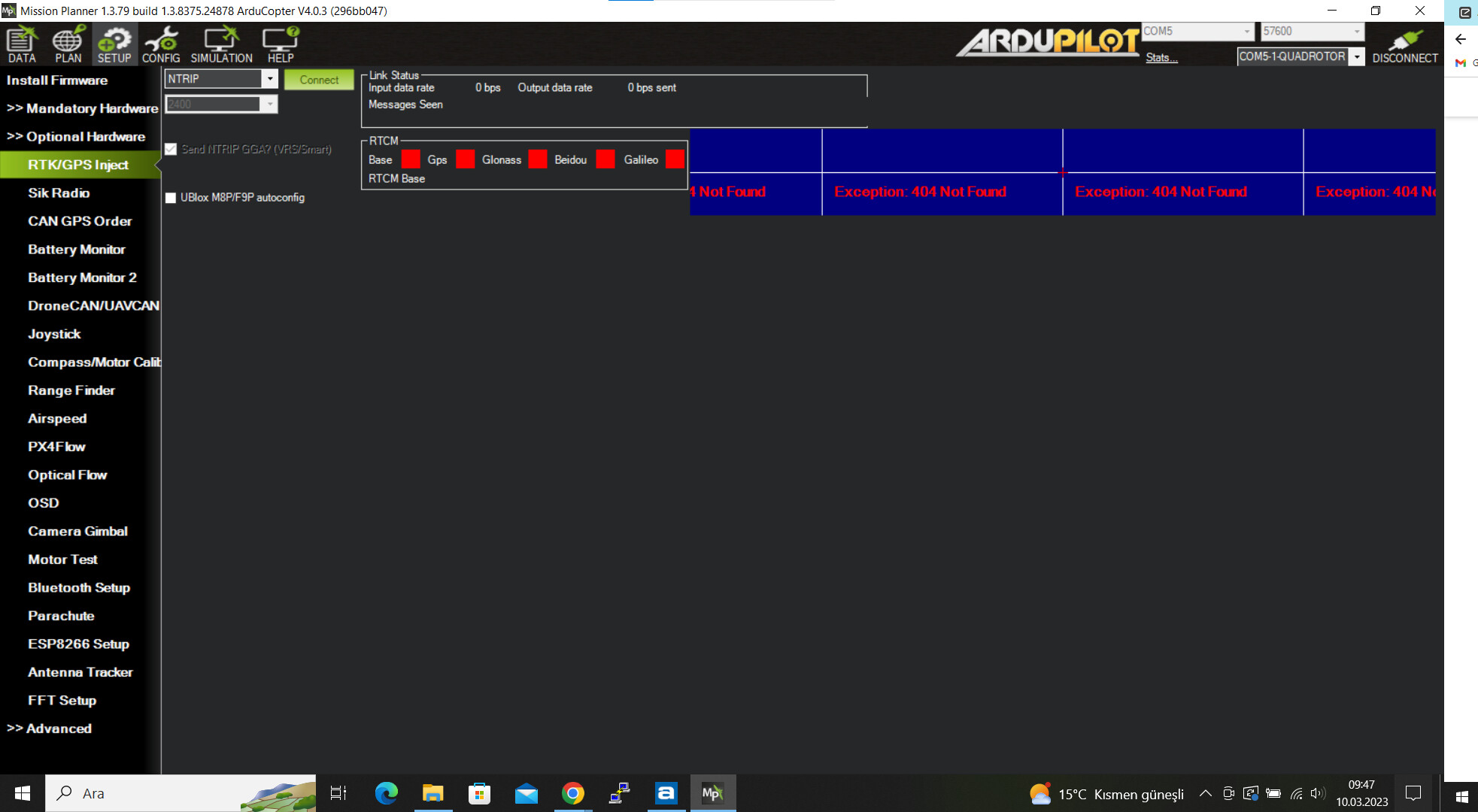
You’ve correctly mentioned this point. Ardupilot integration doesn’t involve LoRa link because RTK corrections are injected into telemetry. But in the initial post you said,
so I bit misunderstand how you want to configure your setup. Could you please describe how you see it?
If you work with LoRa, the rover receives RTK corrections from the base and outputs them to autopilot. This way you provide the autopilot with RTK guidance.
Telemetry is used only for GCS-drone communication. So, you only need to configure it in Mission Planner skipping RTK/GPS inject.
yes, I installed the system with 2 lora.
Do I need to make any extra settings for the rover to send data to ardupilot? (except on the ardupilot integrations page)
Finally, can I see this screen even if I don’t inject?

Hi @res,
Other than Position streaming via Serial port, there are no any extra settings.
I think you won’t see it because corrections aren’t injected.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.